Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
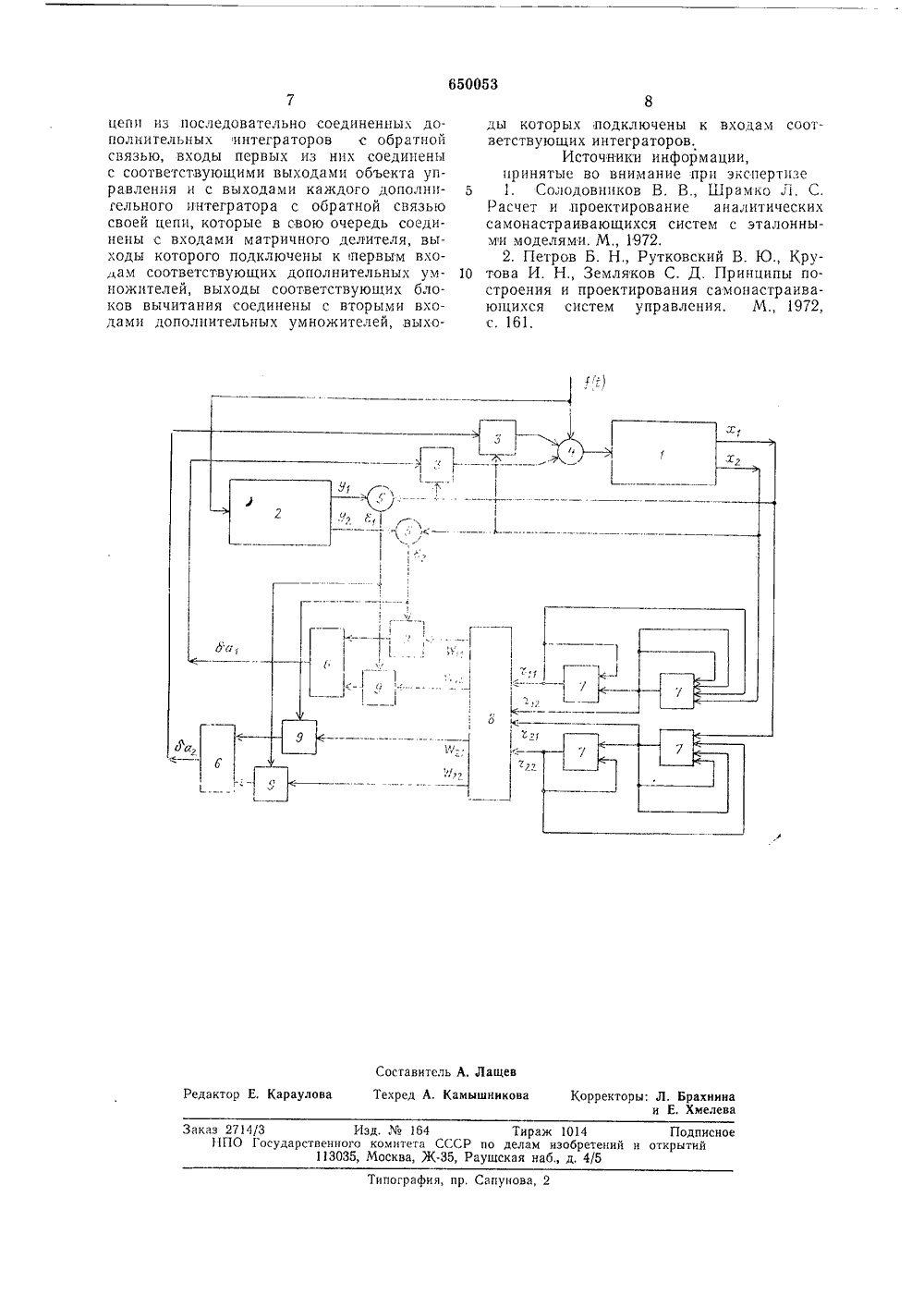
(22) Заявлено 11.01,77 (21) 2443151/18-24 151) Ч, Кчб 05 В 17(00 с присоединением заявкиГосударственный комитет гкгр(23) Пр оритет оо леда:л нзобрнеии,.". (43) Опубликовано 28.02.79. Бюллетень8(,45) Дата опубликования описания 28,02.79(72) Авторы изобретения Ь. И, Прокопов и О. Ю. Копысов Московский институт электронного машиностроения(54) САМО И АСТРА И БА 1 О лзАЯ СЯ СИСТЕМА УП РАВЛ ЕНИЯ Изобретение относится к автоматическому управлению и регулированию и может быть использовано при построении систем управления и стабилизации различного назначения, в частности в автопилотах, в авторулевых, в радиоэлектронной аппаратуре при автоматической настройке их параметров,Известны самонастраивающиеся системы, содержащие эталонную модель, умпожители, сумматор, блоки вычитания и интеграторы 1),Известным самопастраиваюгцю;ся системам с эталонной моделью, предназначенным для автоматической настройки двух и более параметров, присущи следующие недостатки; влияние амплитуды и формы управляющего или возмущающего воздействия на длительность и вид переходных процессов настройки параметров; взаимное влияние процессов настройки в одном из каналов системы на переходные процессы в остальных каналах; сравнительно узкий диапазон начальных отклонений объекта управления, при которых самонастраивающаяся система сохраняет устойчивость и работоспособность.Эти недостатки снижают точность работы самонастраивающихся систем и сужают область их примев. 1 таиболее близким техническим решением к изобретению яьляется самонастраивающаяся система управления, содержащая эталонную модель, умножители, сумматор, 5 блоки вычитания и интеграторы. Соответствующие выходы объекта управления подключены к первым входам соответствующих умножителей, вторые входы которых соединены с выходами соответствующих 10 ии, а выходы умножителей - квходу сумматора, выход которого подключен к входу объекта управления. Одноименные выходы объекта управления и эталонной модели присоединены к входам 15 блока вычитания ,2). К недостатку прототипа относится невысокая точность как следствие невозможности получения экспоненциального переходного процесса по настраиваемым параметрам с наперед задан ной длительностью.Цель изобретения - увеличение точности системы путем получения экспоненциального переходного процесса по настраиваемым параметрам с наперед заданной 25 длительностью.Поставленная цель достигается тем, чтов самонастраивающуюся систему управления введены допочнительные интеграторы с обратной связью, дополнительные умно жители, матричный делитель и параллельгде 1 х = х,х 1 - вектор выходных координат объекта управления; т - символ транспонирования;А - известная;ДА - неизвестные постоянные матрицы параметров объекта управления;оА (1) - (У р,Ж) - матрица, отличные от нуля элементы которой перестраиваются контуром самонастройки,А, ДА и бА (1) имеют вид:0 1 0 0- а - а 1 2. Ьа, ные цспп из последовательно соединенных дополнительных интеграторов с обратной связью; входы первых из ннх соединены с соответствующими выходами объекта управления и с выходами каждогоопол и- тельного интегратора с обратной связью своей цепи, которые в свою очередь соединены с входами матричного делителя, выходами подключенного к первым входам соответствующих дополнительных умножптс лей. Выходы соответствующих блоков вычитания соединены с вторыми входамн дополнительных умножителей, выходы оторых подключены к входам соответствующих интеграторов.11 а чертеже представлена схема самонастраивающейся системы управления, в которой объект управления имест 2-й порядок (Х).На чертеже приняты обозначения;Объект управления - 1; эталонная модель - 2; умножители - 3; сумматор - 4; блоки вычитания - 5; интеграторы - 6; дополнительные интеграторы с обратной связью - 7; матричный делитель - 8; дополнительные умножители - 9; хь хо выходные координаты объекта 1 управления; уь у 2 - выходные координаты эталонной модели 2; вь во - - выходные координаты блоков 5 вычитания; баь ба, - выходные сигналы интеграторов 6; г, г, гзь го 2 - выходные сигналы дополнительных интеграторов 7 с обратной связью; Р, К 2, %ь К, - выходные сигналы матричного делителя 8; 1(1) - выходной сигнал.Работу самонастраивающейся системы управления можно описать следующим образом с помощью матричных дифференциальных уравнений,Объект управлениявектор входного воздействия.Уравнение эталонной модели 21 Оу Р) = Ау Р) + Г Р), у (О) - ,:, (2)где Су = У (1) уЪ1" - вектор выходных координат этал псной модели 2,Выходные координаты еь,е, олоков 5 15 вычитания удовлетворяют уравнению е(1) =- А=. (1) + Х(1) о. , е (0) =- е(3) гдеЛ-(О =- А РЯ (9)Ое 1 Я (1)где РеЯ (1) - определитель матрицы;Абф- присоединенная матрица,составленная из алгебраических дополнений соответствующего элемента матрицы60 Я (1) и транспонированная,Самонастраивающаяся система управления, представленная на чертеже, работаетследующим образом.Объект 1 управления для придания ему65 динамических свойств, заданных эталонной 55- (АХИ) - матрица,Выходные координаты г;, (с, =1Л)дополнительных интеграторов 7 с обратной связью, удовлетворяют матричному диффе ренциальному уравнениюЯ =АЯ(г)-1-КЯ/,+Х(г), Я(О) =О, (6) где / =Ыад (7.,Х ч) - диагональная постоянная (Л КУ) - матрица.45 Перестройка параметров ба(1) производится в соответствии с уравнением5моделью 2, замкнут обратными связями по выходным координатам х, херез первые входы умнокителей 3 и сумматор 4.Блоки 5 вычитания производят сравнение одноименных выходных координат оо - 5 екта 1 управления и эталонной модели 2 по формуле (4).Выходная координата х, объекта управления соединена с входом дополнительного интегратора 7 с обратной связью, стоящего 10 первым в цепи из Ж последовательно сосдинецных дополнительных интеграторов с обратной связью. Аналогичным образом соединены выходная координата х: с дополнительным интегратором 7 с обратной свя зью, стоящим первым во второй цепи. Общее число цепей, составленных из Л последовательно соединенных дополцитсл. - ных интеграторов с обратной связью, равно У. На чертеже У=2. Каждый выход 20 дополнительных интеграторов с обратной связью, стоящих в одной цепи, соединен со своим входом и с входом первого дополнительного интегратора с обратной связью этой же цепи, Дополнительные интеграто ры с обратной связью выполняют интегрирование матричного дифференциального уравнения (6).Выходные координаты гц (, 1=-1У) дополнительных интеграторов с обратной З 0 связью соединены с входами матричного делителя 8, который вычисляет матрицу У(1) по формуле (8),Выходы К матричного делителя 8 соединены с первыми входами соответствую- Зз щих дополнительных умножителей 9, выходы соответствующих блоков 5 вычитация - с вторыми входами дополнительных умножителей 9, выходы которых подключены к входам соответствующих интеграторов 6. 40Дополнительные умножители 9 и интеграторы 6 производят решение дифференциального уравнения (7).Выходы интеграторов 6 соединены с вторыми входами соответствующих умножите- .д лей 3. В случае, если все или некоторые параметры объекта управления не равны соответствующим параметрам эталонной модели 2, выходные сигналы интеграторов 6 изменяются таким образом, чтобы свести 50 параметрическое рассогласование (5) к нулю.Нетрудно видеть, что выходные координаты е(1) блоков 5 вычитания удовлетворяют наряду с уравнением (3) также и алгс браическому соотношениюя= Яа . (10) Матрица й (1) в выражении (10) удовлетворяет уравнению (6) и представляет ту часть в е(1), которая зависит только от выходных координат х,Ях., а следовательно, от амплитуды и формы входного воздействия Р(1). При этом скорость перестройки параметров о(1) в известных само- б настрацвающцхся системах также суще - вецно зависит от вида Р(1). Эта зазцсцмость, нежелательная с точки зрения работы самонастраивающейся системы, устрацястся в предлагаемом цзобретеццн,Это легко показать, Действительно, подставляя в выражения (7), (8) ц (10), по- лучаем цлца (1) -- ,а , а (0). (11) Уравнение (11) имеет решением векторф) цкциюа (У) .: Е -а (0), (12)где б(0)неизвестное начальное парамстрическое рассогласование.Предложенная самонастраивающаяся система может найти применение в тех областях техники, где известные схемы самонастройки ранее не применялись, Она позволяет повысить точность работы за счет получения экспоненциального переходного процесса по каждому из настраиваемых параметров с наперед заданной длительностью, эффекта независимости процессов настройки параметров от амплитуды ц формы входных воздействий, устранения влцяцця процесса настройки в одном цз каналов на переходные процессы в остальны.сохранения устойчивости самонастраивающейся системы прц любых конечных начальных отклонениях параметров объекта от параметров эталонной модели, Кроме повышения точности и расширения области применения, предложенная самонастраивающаяся система управления дает возможность упростить первоначальную наладку систем управления и снизить эксплуатационные расходы.Формула из обретен и яСамонастраивающаяся система управления, содержащая эталонную модель, умно- жители, сумматор, блоки вычитания и интеграторы, соответствующие выходы объекта управления подключены к первым входам соответствующих умножителей, вторые входы которых соединены с выходами соответствующих интеграторов, а выходы умножителей соединены с входом сумматора, выход которого подключен к входу объекта управления, причем одноименные выходы объекта управления ц эталонной модели присоединены к входам блока вычитания, отличающаяся тем, что, с целью увеличения точности системы путем получения экспоненциального переходного процесса по настраиваемым параметрам с наперед заданной длительностью, в нее введены дополнительные интеграторы с обратной связью, дополнительные умножите и, матричный делитель ц параллельныеПодписноекрытий аказ 2714/3 Изд.164 Тираж 1014 11 ПО Государственного комитета СССР по делам изобр 113035, Москва, Ж, Раушская наб., д. ний Типография, пр, Сапуно цепи из последовательно соединенных дополнительных интеграторов с обратной связью, входы первых из них соединены с соответствующими выходами объекта управления и с выходами каждого дополнительного интегратора с обратной связью своей цепи, которые в свою очередь соединены с входами матричного делителя, выходы которого подключены к первым входам соответствующих дополнительных умножителей, выходы соответствующих блоков вычитания соединены с вторыми входами дополнительных умножителей, выходы которых подключены к входам соответствующих интеграторов.Источники информации,принятые во внимание при экспертизе5 1. Солодовников В. В., Шрамко Л. С.Расчет и,проектирование аналитическихсамонастраивающихся систем с эталонными моделями. М 1972.2. Петров Б. Н Рутковский В. Ю., Кру 10 тона И. Н., Земляков С. Д. Принципы построения и проектирования самонастраивающихся систем управления. М 1972,с. 161.
СмотретьЗаявка
2443151, 11.01.1977
МОСКОВСКИЙ ИНСТИТУТ ЭЛЕКТРОННОГО МАШИНОСТРОЕНИЯ
ПРОКОПОВ БОРИС ИВАНОВИЧ, КОПЫСОВ ОЛЕГ ЮРЬЕВИЧ
МПК / Метки
МПК: G05B 17/00
Метки: самонастраивающаяся
Опубликовано: 28.02.1979
Код ссылки
<a href="https://patents.su/4-650053-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Система для передачи и приема данных с решающей обратной связью

Номер патента: 734893
Опубликовано: 15.05.1980
Авторы: Андрущенко, Глушков, Комиссаров, Табатчиков, Федоренко
МПК: H04L 25/40
Метки: данных, обратной, передачи, приема, решающей, связью
...вида модуляции. С выхода одного из демодуляторов принимаемая кодовая комбинация через элемент 21 ИЛИ поступает на вход декодируюшего блока 15, в котором осуществляется преобразование кодовой комбинации из избыточного кода в неизбыточный, и на вход решающего блока 13, в качестве которого может использоваться, например, устройство обнаружения ошибок избыточного кода. С выхода декодируюшего блока 15 производится запись принятой кодовой комбинации в накопитель 16.В решающем блоке 13 принимается одно из двух решений: либо кодовая комбинация выдается получателю 18 информации, либо кодовая комбинация стирается. В анализаторе 23 вида модуляции производится определение вида модуляции, с которым поступает кодовая комбинация, причем при включении...
Система для передачи и приема данныхс решающей обратной связью

Номер патента: 809639
Опубликовано: 28.02.1981
Авторы: Андрущенко, Бойко, Гаврилов, Глушков, Федоренко, Шпагин
МПК: H04L 25/40
Метки: данныхс, обратной, передачи, приема, решающей, связью
...информацияв накопителе 18 отсутствует, то в результате сравнения на выходе компаратора 14 появляется сигнал Несовпадениеф, который поступает на второй вход блока .15. Последний разрешает по этому сигналу прохождениепервого сообщения через элемент 19 Ик получателю 20 и через ключ 16 и элемент 13 ИЛИ - на перезапись в накопитель 18По сумме сигналов Верно иНесовпадение блоК 15 выдает вблок 17 сигнал на формирование комбинации Подтверждение, которая через канал 9 принимается блоком 8, Свыхода блока 8 сигнал Подтверждениеф поступает в датчик 1, разрешаявыдачу второго сообщения. Второе сообщение выдвигает на вход компаратора4 первое сообщение из накопителя 3в то время, как на другой вход компаратора 4 посТупает второе сообщение...
Система для передачи сигналовс обратной связью

Номер патента: 830491
Опубликовано: 15.05.1981
Авторы: Горбашов, Гуйван, Кандаков, Махотенко, Мисурягин, Никитенко, Украинцев
МПК: G08C 25/02
Метки: обратной, передачи, связью, сигналовс
...и центральной частоты фильаров б, к которому подключен также один из выходов детектора 8 ка- . чества канала. Другой выход детектора 8 качества канала подключен ко входу блоха 11 формирования сигнала управляющей обратной связи.Блок 1 1 формирования сигнала управляющей обратной связи соединен с выходом анализатора 10 спектра помех и со входом передатчика 12 обратного канала. На,приемной стороне содржится блок 13 формирования сигнала информационно-решающей обратной связи, вход которого подключен к приемнику 5, а выход - к передатчику 12 обратного канала. Через канал 14 обратной связи информация поступает на приемник 15 обратного канала;Выход приемника 15 обратного канала подключен к передатчику 2 частотно-кодовых комбинаций и к блоку...
Электрогидравлический усилитель мощности с обратной связью по давлению

Номер патента: 1231286
Опубликовано: 15.05.1986
Авторы: Бургвиц, Сиврикова, Староверов
МПК: F15B 9/03
Метки: давлению, мощности, обратной, связью, усилитель, электрогидравлический
...с одинаковой гидравлическойпроводимостью, а дроссель 19 расположен в с 1 едней части золотника 5. При этом отношение гидравлических проводимостей дросселя 19 и дросселя 18 (20) 45 составляет 0,1-0,15. Исполнительные гидролинии 13 и 14 связаны с каналом 17 отверстиями 21 и 22. Отношение эффективных площадей торцовой камеры 9 (10) и торцовой управляющей камеры 50 7 (8) составляет 0,3-0,35.УсилитеЛь работает следующим образом.Сигнал управления с помощью электромеханического преобразователя 14Ф перемещающеися между двумя соплами 3 и 4 заслонки 2 и двух ностоянных дросселей 11 и 12 преобразуется в перепад давления в торцовых управляюцихкамерах 7 и 8. Под действием перепададавления в камерах 7 и 8 золотник 5перемещается в осевом...
Усилитель с отрицательной обратной связью

Номер патента: 78474
Опубликовано: 01.01.1949
Автор: Розенкранц
МПК: H03G 3/22
Метки: обратной, отрицательной, связью, усилитель
...нагрузочного сопротивления лампы 5, т. е. включена параллельно сопротивлению 18.Анод 25 регулирующей лампы 24 соединен через конденсатор 2 б с сопротивлением 18, анодное напряжение подается от плюса батареи Б через провод 19 и сопротивление 27.Катод 28 соединен с потенциометром обратной связи 7, а управляющая сетка 29 соединена через сопротивление 30 с землей 11 или шасси усилителя, При таком соединении в:начальный момент работы усилителя между сеткой 29 и катодом 28 лампы 24 возникает полное смещение, снимаемое с потенциометра 7.33378474 В начале работы усилителя и в момент отсутствия сигналов эффект шунтирования сопротивления 18 лампой 24 равен нулю.Для получения дополнительного отрицательного смещения на управляющей сетке лампы 24 на...
Предыдущий патент: Способ формирования управляющего сигнала в системах автоматического регулирования
Следующий патент: Регулятор давления
Случайный патент: Короткодуговая лампа одноразового действия