Манипулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
СОЮЗ СОВЕТСКИХСООИАЛИСТИЧЕСНИХРЕСПУБЛИК 40 А 1 14 ЛЬСТВ Е;,. неки (72) и ие,ерит С:рассогт пере- зубчат ласов меще рееч ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИ ВТОРСКОМУ Сви(56) Авторское свидетельство СССР Кф 1119837, кл, В 25,1 9/00, 1986, (54) МАНИПУЛ 51 ТОР(57) Изобретение относится к области гибкого автоматизированного проиэвод ства и может быть использовано в атомном машиностроении и котлострое нии для автоматизации операций по выполнению работ, связанных с переда чей иэделий, имеющих различную массу с одной позиции на другую. Цель изоб ретения - повышение быстродействия и точности позиционирования за счет аккумулирования энергии пропорционально весу переносимых изделий. Ма(51) 4 В 25,Т 9/00//В 25 д 1 нипулятор содержит установленную наосновании 1 руку 3, перемещение которой осуществляется посредством двухрасположенных симметрично относительно оси вращения руки силовых цилиндров 24 и 25, одна из полостей которых (штокрвая ) связана через управляемые клапаны с гидросистемой, адругая - с пневмосистемой. Такое выполнение привода руки 3 позволяетиспользовать силовые цилиндры 24 и25 и в качестве аккумуляторов энергии. При этом величина запасаемойэнергии при переносе груза регулируется перемещением датчика 13 с помощью узла адаптации манипулятора кмассе захватываемого изделия, содержащего тензометрическое сопротивлестановленное на руке ельный мост, по сигналу ния которого происхо е датчика 13 с помощ й передачи. 5 ил,Изобретение относится к области гибкого автоматизированного производства и может быть использовано ватомном машиностроении и котлостроеСнии для автоматизации операций повыполцецию работ, связанных с передачей изделий, имеющих различный вес,с одной позиции на дрУгую,Цель изобретения - повышение быст еродействия и точности позиционирования за счет аккумулирования энергиипропорционально несу переносимых изделий,Иа сЬиг, 1 изображен манипулятор, 15общий вид", на Фиг. 2 - вид Л наФиг.1; на фиг, 3 - разрез Б-Б нафиг.1; на Фиг. 4 - лектрнческая,схема манипулятора; на Фиг. 5 - пцевкеаеическая схема манипулятора, 2011 ае,еепулятор содержит Основаеееее 1,ца котором шарнирно посредством Оси2 с Вазмакностью плоскопараеелельногоперемещения в вертикальной .плоскостизакреплена механическая рука 3 со 25схватам 4, имеющим губки 5. ЕЕеханическая рука 3 представляет собой шарнирно-рычажный пар елелаграммньей механизм, закрепленный на оси 2 посредством коромысла 6, жестко связанного 30С ЕЕЕЙ.По ходу вращения одного из пгеечкооамысла 6 на основании 1 выполнендугообразный паз,в катаром с лаз -мажностъю регулирования во время наладки путем перемещения вдоль пазазакреплены четыре планки с датчиками8-11 попе.,ения соответственна .е рейка 12 зубчата-реечной передачи, накоторой закреплен датчик 13 положе 4 рЕЕИЯ .Датчики положения обеспечивают Выполнение команд работы манипуляторав заданных тачках рабочего пространства.Е 5Основныг датчики 8 и 1 палакгниясоответствуютточкам установки изделия на техоборудавание отключаеот подачу и удаление масла из штоковыхполостей цилиндров., управляют работойсхвата, обеспечивающего установку илиснятие изделия с технологическогооборудования,Положение дополнительного датчика 9 соответствует нейтральному положению руки 3 и обеспечивает подачу сжатого воздуха или вентилирование пневмоамортизаторов, Это нейтральное положение соответствует вертикальному положению механической руки.Дополнительные датчики 1 О и 13 обеспечивают переход с режима свободного движения на режим тармакениее путем прекращения подачи сжатого воздуха в поршневую полость одного из цилиндров, в результате чего руказамедляет свое движение.Схват 4 связан с рукой 3 через тензаметрическое звено 14. Работу схвата 4 обеспечивают гидрацилиндр 5 и пневмоцилиндр 16, выполненные в одном корпусе. Гидрацилиеедр 15 обеспечивает захват изделия, г пневмацилиндр 16 - их снятие или установку на технологическое оборудование. Звена 14 является чувствительным элементам узла 1 адаптации к массе переносимых изделий. Узел 1 выполнен в виде измерительного моста 18 сопротивлений, в одно из плеч каторага входит тензаметрическае сопротивление звена 14, а другое Образована переменным сопротивлением обратной связи 19, д ижак которого механичес.- ки связан с рейкой 12, находящейся в зацеплении с шестерней 20, сидящей жестко на валу дьигателя 21, установленного на основании 1,;.Еиаганаль каста 18 и злектродви-атель 21 через усиштгль 22 связаны с блоком 23 управления. Привод руки 3 выполнен в вице двух шарнирна установленных на асноваеепи 1 гидрацилиндрав 24 и 25, закрепленных на одной высоте ат асчаваееияБссштОКОВые полости этих ци линдрав связаны с пневмасистемай и представеяеот собой пневмаамартиз атары и аккумуляторы мгханичгсхай знеегии а штаковые полости этих цилиндров связаны с гидрасистемай. Штоки цилиндров 24 и 25 шарнирна закреплены на плечах коромьгпа 6 симметрична относительно аси ьращенья ме;аническай руки 3 е.асрецствам асей 26 и 2,На оси 26 установлен лепеста28, связанный сс штокам цилиндра 24 и индуктивно Взаимодействующий пааче редно с датчиками 8,13,9-11 положения которые являются чувствительными элементами блока 23 управления.Блок управления вклеочает в себя как слаботочную, так и силовую цепь. Исполнительными элементами силовойцепи являеотся электромагниты . злектрогидрараспределителей 29 и 30;-: электропневмораспределителей 31-33, 1444140представляющие собой управляемые клапаны.Злектрогидрораспределитель 29 гидравлически связан со штоковыми полоС- тями цилиндров 24 и 25, электрогидро 5 распределитель 29 - с гидроцилиндром 15 схвата 4. Электропневмораспределитель 3. связан с бесштоковой полостью цилиндра 24, электропневморас пределитель 32 - с бесштоковой полостью цилиндра 25, элекропневмораспределитель 33 - с пневмоцилиндром 16 схвата 4.Манипулятор работает следующим об разом,Манипулятор включен в технологическую цепь робототехнического комплекса и получает команды о перемещении или остановке со станков, стоящих в технологической цепи комплекса.Исходное положение манипулятора вертикальное, схват открыт, Блок 23 управления запитывает электропневмораспределители 31 и 32,. Сжатый воз дух подводится в бесштоковую полость пневмоцилиндра схвата. Бесштоковая полость цилиндра 25 соединяется с атмосферным воздухом, а в бесштоковую полость цилиндра 24 подается сжа п тый воздух, После подачи сигнала с технологического оборудования в блок 23 управления о наличии детали силовая управляемая цепь блока управления включает электрогидрораспредели тель 29, Масло подается в штокояую полость цилиндра 24 и удаляется из штоковой полости цилиндра 25, механическая рука 3 двигается в сторону станка с изделием. Шток, перемещаясь, 40 ведет лепесток 28 вдоль дугообразного паза 7, при этом лепесток, индуктивно взаимодействует с датчиком 10 положения, передает сигнал с блок 23 управления и далее на электропневмораспределитель 31. Доступ сжатого воздуха в бесштоковую полость цилиндра 24 прекращается.Воздух, сжимаясь в замкнутом объеме под действием поршня, начинает работать как пружина. 50 В данном случае бесштоковая полость цилиндра 24 выполняет роль амортизатора, гася кинеическую энергию движущихся масс и аккумулятора, накапливая потенциальную энергию для отдачи ее на обратном ходе. Механическая рука 3 начинает замедлять свое движение. В районе нахождения изделия кинетическая энергия израсходуется, лепесток 28 войдет в контакт сдатчиком 1 положения. С датчика сигнал поступает в блок 23 управления.Силовая управляемая цепь блока управления включает электрогидрораспределители 29 и 30 и электропневмораспределитель 33. Подача масла в штоковую полость цилиндра 24 и удаление маслаиз штоковой полости цилиндра 25 прекращается. Механическая рука 3 останавливается в заданном положении. Подается масло в бесштоковую полостьгидроцилиндра 15 схвата, схват 4 захватывает изделие. Затем подается сжатый воздух в штоковую полость пневмоцилиндра 16. Схват 4 снимает изделиес посадочного места станка. Вес схвата с изделием увеличивается, тензометрическое звено 14 воспринимает вес изделия и изменяется величина тензометрического сопротивления. По диагонали моста 18 течет ток рассогласования, который усиливается усилителем 22. Усиленный сигнал поступаетк двигателю 21, Последний начинаетвращать шестерню 20, перемещая зубчатую рейку 12 и датчик 13 положения на определенный угол. Рейка 12 перемещает движок переменного сопротивления 19, которое уравновешивает плечи моста 18, Сигнал рассогласования с диагонали моста 18 прекращается.Подача к двйгателю усиленного, сигнала прекращается и он оставливаетсяПосле прекращения поступления сигнала рассогласования с диагонали моста 18 в усилитель 22 он подает команду в блок 23 управления. Поступает команда на электрогидрораспредели- . тель 29. Масло поступает в штоковую полость цилиндра 25 и удаляется из штоковой полости гидроцилиндра 24. При этом штоки цилиндров 24 и 25 совместно с коромыслом 6 и рукой 3 начинают перемещение от станка с изделием к месту установки изделия. Когда рука проходит вертикальное положение, посредством лепестка 28 срабатывает, датчик 9 положения и сигнал поступает в блок 23 управления. Последний дает команду электропневмораспределителям 31 и 32. Бесштоковая полостьцилиндра 24 соединяется с атмосферным воздухом, а в бесштоковую полость цилиндра 5 подается сжатый воздух,Проходя датчик 13 поло,.ения, лепесток 28 индуктивно с ним взаимодействует. С датчика 13 сигнал поступаетв блок 23 управления, который даеткоманду электропневмораспределителю32 и в бесштоковую полость цилиндра25 прекращается подача сжатого возду 5ха, Масса газа, сжимаемого в бесштоковой полости цилиндра 25, находитсяв прямой зависимости от веса переносимых манипулятором иэделий.Эта полость цилиндра начинает работать как амортизатор, гася энергиюдвижущихся масс, и как аккумулятор,накапливая ее для отдачи на обратномходе. Рука 3 замедляет свое движение,и при дальнейшем перемещении штокацилиндра 25 вниз лепесток 28 взаимодействует с датчиком 8 положения.Сигнал поступает в блок 23 управления. Последний подает сигнал электрогидрораспределителям 29 и 30 и э;ект ропневмораспределителю 33,Прекращается подача масла в штоковую полость цилиндра 25 и удалениемасла из штоковой полости цилиндра24, подается сжатый воздух в бесштоковую полость пневмоцилиндра 16 схвата 4, а масло - в штоковую полостьгидроцилиндра 15 схвата 4.Механическая рука останавливаетсяв заданном положении. Пневмоцилиндр16 схвата 4 устанавливает изделиена посадочное место станка, и гидроцилиндр 15 освобождает изделие из губок схвата 4, Масса схвата уменьшается, изменяется сопротивление тензо 35метрического звена 14, по диагоналимоста 18 идет ток рассогласования,который усиливается усилителем 22,и передается на двигатель 21, который, вращая шестерню 20, перемещаетзубчатую планку 12 и датчик 13 положения в исходное положение и механически воздействует на переменное сопротивление 19, плечи моста сопротивления уравновешиваются, ток рассогласования прекращается, с усилителя 22 прекращается подача сигналарассогласования, двигатель 21 оста-.навливается,Со станка, на котором установленоиэделие, в блок 23 управления посту 50пает сигнал о наличии изделия, Блок23 управления дает команду на электрогидрораспределитель 29. Масло поступает в штоковую полость цилиндра24 и удаляется из штоковой полостицилиндра 25. Механическая рука 3 начинает движение в сторону первогостанка, при этом лепесток 28 индуктивно взаимодействует с датчиком 9положения, Сигнал поступает в блок 23управления, Последний подает командуэлектропневмораспределителям 31 и32, Бесштоковая полость цилиндра 25соединяется с атмосферным воздухом.В бесштоковую полость цилиндра 24подается сжатый воздух,Дальнейшее движение манипулятораповторяется.В случае необходимости остановки манипулятора, когда со станка нет сигнала о наличии изделия, блок 23 управления включает электрогидрораспределитель 29, прекращается поступление масла в штоковую полость цилиндра 24 и удаление масла из штоковой полости цилиндра 25. Механическая рука 3 останавливается в вертикальном исходном положении.Формула изобретенияМанипулятор, содержащий установленную на основании руку со схватом, привод ее . еремещения, аккумуляторы механической энергии, датчики крайних положений руки и блок управления, о т л и ч а ю щ и й с я тем, что, с целью повышения быстродействия и точности позиционирования за счет аккумулирования энергии пропорционально весу переносимых изделий, он снабжен узлом адаптации манипулятора к весу изделия, гидро- и пневмосистемами с управляемыми клапанами, зубчато в реечн передачей и тремя дополнительчыми датчиками положения руки, первый из которых установлен с возможностью взаимодействия с рукой при вертикальном ее положении, а два других установлены соответственно между первым дополнительным датчиком и датчиками крайних положений, при этом один из этих двух дополнительных датчиков установлен на рейке зубчато- реечной передачи, а узел адаптации к весу изделия содержит тензометрическое сопротивление, установленное на руке манипулятора, измерительный мост, в одно плечо которого включенс указанное тензометрическое сопротивление, а другое содержит переменное сопротивление с движком, усилитель и двигатель, включенный через этот усилитель в диагональ измерительного моста при этом движок переменногосопротивления соединен с рейкой зубчато-реечной передачи, а вал двигателя - с шестерней этой передачи, кроме того, привод перемещения руки иаккумуляторы механической энергиивыполнены в виде двух силовых цилиндров шарнирно связанных с основанием,штоки которых шарнирно связаны срукой симметрично относительно осиее поворота, а штоковые и бесштоковыеполости силовых цилиндров через управляемые клапаны, связанные с блокомуправления, соединены соответственнос гидро- и пневмосистемами.1444140 Пилипенко рек 34/16 Тираж 908 ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д, Заказ писное/5 жгород, ул, Проектная изводственно-полигра ское предприятие ФЬг 5 Составитель ф. Майоров едактор М, Петрова Техред Л.Сердюкова
СмотретьЗаявка
4225074, 06.04.1987
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "АТОМКОТЛОМАШ"
МОРОГОВ МИХАИЛ НИКОЛАЕВИЧ, КРАЙНОВИЧ МАРК ЮДЕЛЕВИЧ, РУБАНОВ НИКОЛАЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятор
Опубликовано: 15.12.1988
Код ссылки
<a href="https://patents.su/6-1444140-manipulyator.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор</a>
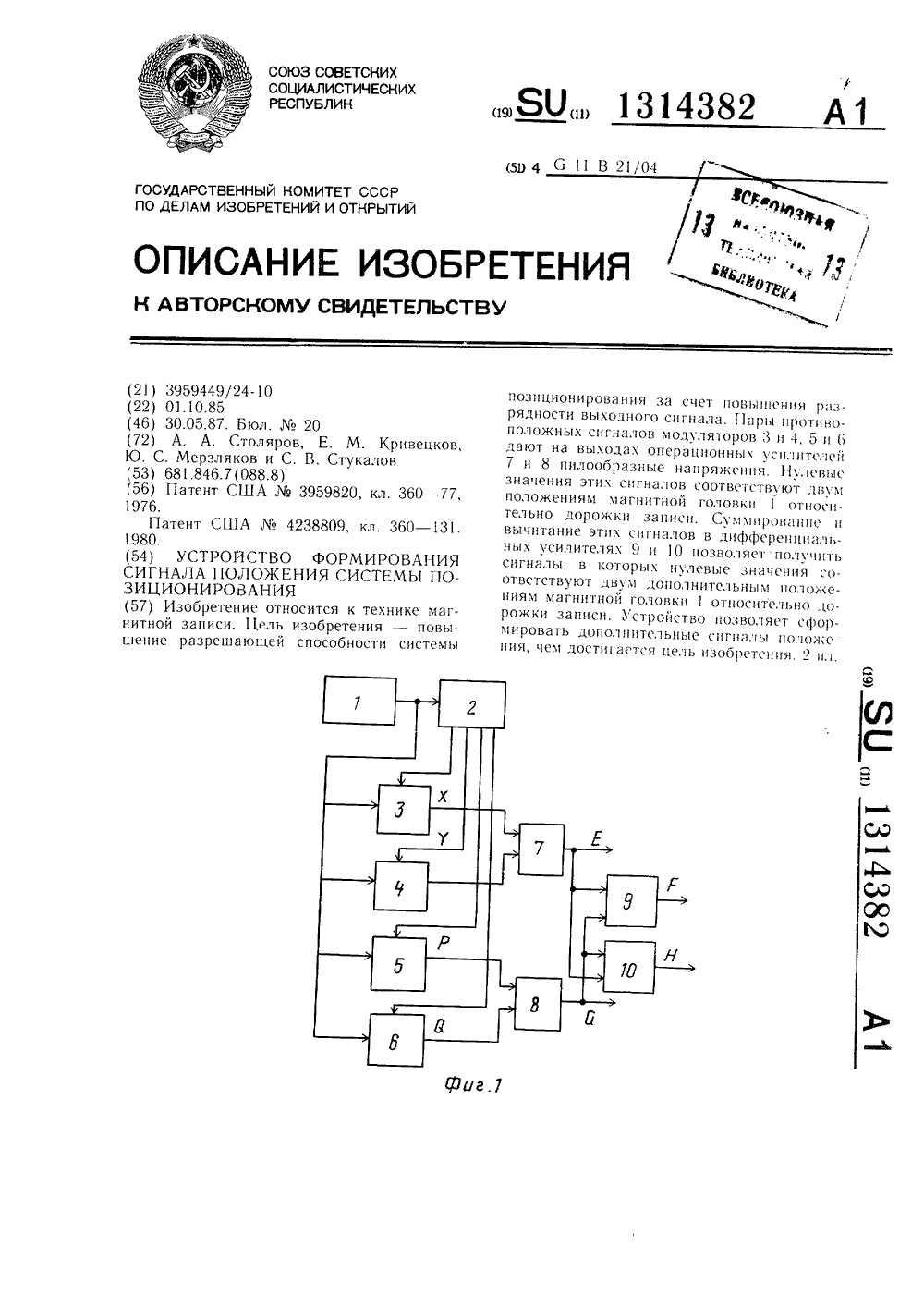
Устройство формирования сигнала положения системы позиционирования
Номер патента: 1314382
Опубликовано: 30.05.1987
Авторы: Кривецков, Мерзляков, Столяров, Стукалов
МПК: G11B 21/04
Метки: позиционирования, положения, сигнала, системы, формирования
...разредающей способности системы позициониро 5 вания за счет повышения разрядности сформированного сигнала.На фиг. 1 показана функциональная схема устройства; на фиг. 2 -- временная диаграмма выходных сигналов при переме шенин магнитной головки вдоль радиуса дискового магнитного носителя.Устройство содержит магнитную головку 1, генератор 2 стробирующих импульсов, демодуляторы 3 - 6, операционные усинлители 7 и 8, суммирующии и вычитаю 15 гций дифференциальные усилители 9 и 10 соответственно.Устройство работает следующим образом.Магнитная головка 1 имеет длину рабочего зазора, равную ширине двух дорожек на которых записаны четыре типа фазомодулироваццых сигналов. Поэтому сигнал, воспроизведенный магнитной головкой 1, демоду...
Сборочная машина для установки головок на блоки цилиндров двигателей внутреннего сгорания

Номер патента: 251360
Опубликовано: 01.01.1969
Авторы: Автоматических, Первое
МПК: B23P 21/00
Метки: блоки, внутреннего, головок, двигателей, сборочная, сгорания, установки, цилиндров
...того, для освобождения гидравлических захватов головки при наведении ее на конические контрольные шпильки блока пред назначены сблокированные с валом поворота механической руки контакты, включающие распределительный механизм гидравлических захватов при угле поворота вала, соответствующем началу введения конусной части шпи лек в отверстия в головке.В момент надевания головки на контрольные шпильки блока цилиндров, крепящие головку к платформе станка, упоры ослабляются, и головка имеет возможность свободно смещаться З 0 ороны на небольшую величину в плоазмещения шпилек, что обеспечиваети точную установку головки на бловремя поворота от постоянной величины на угле поворота от исходного положения до соприкосновения опорной плоскости...
Устройство для перемещения и установки изделий в заданное положение

Номер патента: 570325
Опубликовано: 25.08.1977
Авторы: Ниль, Свен, Том, Эмиль
МПК: B66F 3/34
Метки: заданное, перемещения, положение, установки
...9, при этом между секцией 2 и держателем 8 установлена прокладка 10,К секции 3 прикреплен цилиндр 11 блока с кронштейном 12, на котором установлены магниты 13, Полость А цилиндра соединена каналома с системой подачи рабочего тела (на чертеже не показана). В полости А установлен поршень 14. Секция 2 выполнена с продольным пазом б.Каждый из упоров снабжен стержнем 19, связанным электрически с сигнальным устройством (на чертеже не показан), Стойка 15 выполнена с пазом впо которому шпильки 17 могут перемещаться и жестко закрепляться на стойке в требуемом месте,На плите 1 установлены также теле скопически соединенные между собой патрубки 20 и 21, по которым подается рабочее тело в цилиндр 5.Устройство работает следующим образом,...
Поточная линия для сборки и сварки блоков цилиндров дизельных двигателей

Номер патента: 753573
Опубликовано: 07.08.1980
МПК: B23K 37/04
Метки: блоков, двигателей, дизельных, линия, поточная, сборки, сварки, цилиндров
...складируется стальное литье- стойки картера блока.На Фрезерные станки 2 при помощикран-балки 3 поочередно устанавливают и обрабатывают литые стойки картера блока. Ведут обработку площадок и контактирующих поверхностей подконтактна-стыковую сварку. После обработки каждую стойку картера блокаустанавливают кран-балкой на платформу вертикального подъемника 4, гдекомплектуется необходимОе число стоек(в зависимости от модификации двигателя). груэки машины 9 для контактно-стыковой сварки.После передачи комплекта стоек сподъемника 4 в накопитель машины 9для контактно-стыковой снарки с пульта 13 задается программа, в соответствии с которой механизм подачи заготовок подает стойки по одной в зонусварки, где способом контактно-стыковой сварки...
Устройство для расточки на токарном станке внутренней полости в деревянных изделиях

Номер патента: 1219349
Опубликовано: 23.03.1986
Автор: Короткин
МПК: B27C 7/02
Метки: внутренней, деревянных, изделиях, полости, расточки, станке, токарном
...вид сверху; на фиг.2 - разрез А - А на фиг.1; на фиг.3 - разрез Ь - Б на фиг.1.Устройство содержит установленные на станине токарного станка переднюю бабку 1 с зажимным патроном и заднюю бабку 2 с пинолыо. В пиноли задней бабки 2 установлен подручник 3, состоящий из направляющей 4, на которой смонтированы подвижные платформа 5 с установленным резцом 6 и платформа 7 с держателем-щупом 8, самописцем 9 и перомО. На станине токарного станка закреплен контрольно копирный узел 11, состоящий из шаблона 12 и лентопротяжного механизма 13 с копирной лентой 14. Платформа 5 имеет основание 15 и поворотную часть 16, при которой установлен сменный резец 6. Платформа 7 имеет основание 17 и поворотную часть 18, на которой установлен держатель 8...
Предыдущий патент: Промышленный робот жаркова
Следующий патент: Промышленный робот
Случайный патент: Корреляционный спектрометр