Способ автоматической подналадки инструмента и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
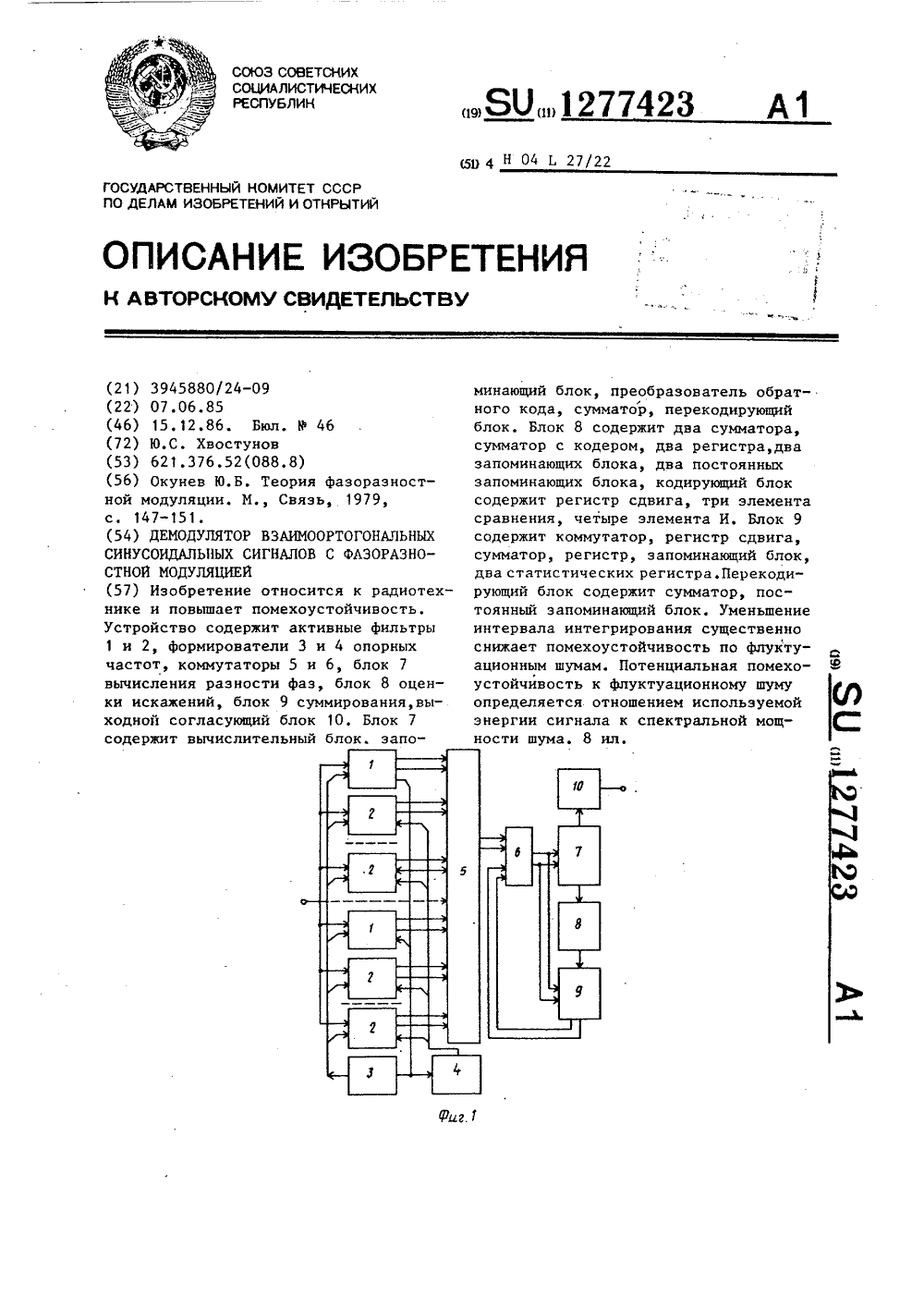
00 23 ОПИСАНИЕ ИЗОБРЕТЕК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Я ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИ(71) Киевское специальное конструк" торское бюро многошпиндельных автоматов(56) Рабинович А.Н. Приборы и системы автоматического контроля размеров деталей машин. Киев, 1970, с. 326-.352.(54) СПОСОБ АВТОМАТИЧЕСКОЙ ПОДНАЛАДКИ ИНСТРУМЕНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(57) Изобретение относится к обработке резанием, в частности к автоматическому управлению настройкой инструмента. Цель изобретения - повыше ние точности обработки и упрощение конструкции устройства. Для этого подналадку при поступлении сигналов того же знака, что и при предыдущей подналадке, производят после каждогосигнала, а при чередовании сигналовразличных знаков следующую подналадку производят после накопления такого количества сигналов соответствующего знака, которое превышает,поменьшей мере, на один сигнал числосигналов противоположного знака впределах заданной группы. В качестве запоминающего элемента используется звено 9, выполненное с пазом,,боковые стенки которого обеспечивают зазор К в направлении подналадочного перемещения относительно сопряженного звена 9, определяемый изуравнения К = МТ 1, где М - заданноеколичество накапливаемых сигналов;Т - величина подналадочного перемещения привода подналадки после поступления одного сигнала;- передаточное отношение цепи от приводаподналадки до звена, выполненногос пазом. 2 с.п. ф-лы.1313649 25 группы. К=МТ 1Изобретение относится к обработке металлов резанием и может быть использовано для повышения точности обработки на металлорежущих станках, в частности на токарных многошпиндельных автоматах.Целью изобретения является повышение точности подналадки за счет учета характера изменения знака отклонений размеров обрабатываемых де- Ю талей.Согласно предлагаемому способу.после накопления заданной группы сигналов одного знака об отклонении размера деталей сверх установленного 15 предела подналадку при поступлении сигналов того же знака, что и при предыдущей подналадке, производят после каждого сигнала, а при чередовании сигналов различных знаков 20 следующую подналадку производят пос" ле накопления такого количества сигналов соответствующего знака, которое превышает, по меньшей мере, наодин сигнал число сигналов противоположного знака в пределах заданной На фиг. 1 изображено предлагаемое устройство, смонтированное на то- ЗОкарном многошпиндельном автомате,общий вид; на фиг. 2 - разрез А-Ана фиг. 1 (по звену привода подналадки); на фиг. 3 и 4 - схемы,поворотных приводов подналадки соответственно с винтовым и кулачковым звеньями регулирования инструментов; нафиг. 5 - схема поступательного привода подналадки с клиновым звеном регулирования инструмента. 40Устройство для автоматической подналадки (фиг. 1) компонуется на каретке 1 продольного суппорта токарного многошпиндельного автомата, вповоротном шпиндельном блоке 2 которого размещены патрон 3 с закрепленными в них,цеталями 4 и 5. Устройство состоит из поворотного привода б подналадки с выходным валом7, связанным посредством поводка 8со звеном 9, закрепленным на валу 10посредством шпонки 11. Вал 10 снабжен коническим участком - конусом12 и резьбой 13. На конус 12 опирается толкатель 14, контактирующий 55с упругой частью 15 резцедержателя16, В упругой части 15 закрепленрезец 17. В следующей позиции автомата размещен измеритель 18,2В отверстии звена 9 на участке,сопряженное с валом 7, выполнен паз,боковые стороны 19 и 20 (фиг, 2)которого разнесены на угол К, образуя зазор по отношению к поводку 8.Против боковой стороны 20 паза размещен регулировочный винт 21,По варианту, изображенному нафиг. 3, на выходном валу 7 привода6 подналадки размещены шестерня 22,связанная с шестерней 23. Последняяможет передавать вращение винту 24через звенья 8 и 9, в сопряжении которых обеспечен зазор К.Вариант конструкции, изображенныйна фиг. 4, отличается от варианта,изображенного на фиг3, отсутствием зубчатой передачи и наличием кулачка 25, закрепленного на звене 9. В варианте конструкции, изображенному на фиг. 5, применен привод 6 подналадки с выходным штоком 26, имеющим воэможность поступательного перемещенияЗакрепленный на штоке 26 поводок 8 размещен в пазу звена 9, выполненного заодно с клином 27.Углы подъема резьб винтов 13 (фиг.1) и 24 (фиг. 3), спирали кулачка 25 (фиг. 4), углы конуса 12 (фиг, 1) и клина 27 (фиг. 5) выполнены из условия самоторможения меньшими, чем значение углов трения.Величина зазора К выполнена, исходя из условия где М - заданное количество накапливаемых сигналов (М = 24в зависимости от условий обработки);Т - величина подналадочного перемещения выходного звена привода б подналадки после поступления одного сигнала;- передаточное отношение цепиот привода 6 подналадки дозвена 9, выполненного с пазом (х=1 для вариантов конструкций по фиг. 1, 4 и 5;22х = - для варианта по фиг. 3, где 2 и 2 соот 22ветственно числа. зубьев ведущей 22 и ведомой 23 шестерни) .Устройство работает следующим образом.3 13136По окончании обработки деталей 4 (фиг. 1) каретка 1 с подналадочным устройством отходит. (вправо по фиг,1) от обработанной детали, последняя переносится с блоком шпинделей в по 5 зицию измерения под щуп измерителя 18. Одновременно осуществляется обработка следующей детали в предыдущей рабочей позиции, где каретка 1 движется вдоль детали со скоростью ра бочей подачи.При выходе размера детали сверх установленного предела в сторону увеличения или уменьшения сигнал соответствующего знака поступает к при воду 6 подналадки, вызывая поворот вала 7 (или перемещение штока 26 (фиг5) на заданную величину Т шага подналадки в требуемую сторону. На такую же величину перемещается по водок 8 (по фиг. 2, 4 и 5), свяэан - ный непосредственно с выходным звеном привода. При наличии промежуточных передач поводок 8 перемещается на величину 1 Т, где 1 - передаточное отношение кинематической цепи от подналадки до поводка 8 на фиг.3 перемещение поводка 8 после поступления одного сигнала составляет 22, ф- ф- Т, где 2 и 2 соответственгг 2 ьно числа зубьев ведущей и ведомой шестерен 22 и 23. По мере поступления сигналов одного знака поводок 8, перемещаясь на шаг Т за каждый сигнал, постепенно приближается к одной из боковых сторон 19 и 20 (фиг. 2) паза, не вызывая подналадки. Таким образом осуществляется на О копление, счет и запоминание сигналов. Сигналы накапливаются до полного выбора зазора, т,е. до момента касания поводка 8 соответствующей боковой стороны паза, либо 45 торца регулировочного винта 21 (фиг. 2 и 5). При поступлении следующего сигнала того же знака, что предшествовал выбору зазора, происходит подналадка, так как поводок 8, смещаясь на шаг, поворачивает звено 9 (фиг. 2), либо перемещает его прямолинейно (фиг, 5), звено 9 всвою очередь поворачивает винт 13 (фиг.1); который смещается по резьбе в резце-. 55 держателе 16, вызывая продольное смещение конуса 12, который, воздействуя через толкатель 14 на упругую часть 15, поворачивает ее на заданный угол 4вокруг оси ослабленного сечения,сообщая подналадочное перемещение резцу 17, Если при измерении следующей детали окажется, что произведенной подналадки недостаточно, т.е. интенсивно растущая погрешность скомпенсирована не полностью, на привод подналадки поступит сигнал того же знака, что и предыдущей подналадке. В этом случае подналадка осуществляется непосредственно после поступления сигнала, так как поводок 8 продолжает контактировать с сопряженной поверхностью звена 9. При чередова-. нии сигналов разных знаков, что свидетельствует о случайных отклонениях размера, привод 6 подналадки и поводок 8 совершают возвратно-вращательные (либо возвратно-поступательные) перемещения, не передавая движения звену 9,т,е, не выдавая команду на подналадку резца 17. Таким образом, резец 17 не реагирует на случайные возмущения.Количество накапливаемых сигналов в группе определяется величиной К зазора в звене 9 и может быть изменено регулировкой винта 21 (фиг.2 и 5) либо применением комплекта из нескольких сменных звеньев с разными зазорами. При большом угле поворота вала 7 привода 6 (фиг.1), когда паз необходимой величины на одном участке звена выполнить затруднительно, пазы выполняются в нескольких звеньях кинематической цепи либо в одном звене, сопряженном с несколь кими другими. Так в устройстве изображенном на фиг. 1, паз в звене 9 может быть выполнен на двух участках, сопряженных со звеньями 8 и 11, при этом суммарная величина зазора определяет заданное количество сигналов в группе.1 Если отношение величины зазора К (фиг. 2) к шагу Т звена 7 выражается дробным числом, то подналадка противоположного знака по отношению к предшествующей осуществляется на неполный шаг, а последующие подналадки того же знака - на полный шаг, т.е. в этом случае количество накапливаемых сигналов в группе фактически задается дробным числом.Осуществление подналадки после каждого сигнала того же знака, что и при поступлении сигналов, вызвавших предыдущую подналадку, обеспечивает вы1313 б 49 осуществляют подналадку инструмента, о т л и ч а ю щ и й с я тем, что, с целью повышения точности подналадки при получении отклонений того же знака, что и при предыдущей подналадке, подналадку производят после получения каждого такого отклонения, а при чередовании отклонений различных знаков производят накопление ко личества отклонений различных знакови следующую подналадку производят после накопления такого количества отклонений соответствующего знака, которое превышает, по меньшей мере, 15 на одно число отклонений противоположного знака в пределах заданного.2. Устройство для автоматической подналадки инструмента, содержащее привод подналадки, связанное с ним 20 посредством кинематических звеньевсамотормозящее звено регулирования положения инструмента и элемент запоминания знака отклонений размеров и лодачи команды на подналадку 25 после накопления заданного количества отклонений одного знака, о тл и ч а ю щ е е с я тем, что, в качестве элемента запоминания использовано по крайней мере одно из звень ев кинематической связи, выполненноес пазом, обеспечивающим в направлении подналадочного перемещения зазор относительно сопряженного звена, определяемый из уравнения35К = МТд где К -Формула изобретения 40 ладки инструмента, при котором определяют знак отклонения размеров обрабатываемых деталей от заданного, 45осуществляют накопление количестваотклонений одного знака до заданного 5сокую точность обработки в условиях3интенсивного возрастания систематических погрешностей, вызванных повышенным износом инструмента в период его приработки и нагревом станка, в отличие от известного способа, при котором независимо от интенсивности возрастания погрешностей команда на подналадку подается только при накоплении заданного количества сигналов. Осуществление подналадки при чередовании сигналов различных знаковпосле накопления количества сигналов соответствующего знака, превышающего, по меньшей мере, на один сигнал число сигналов противоположного знака, позволяет вновь накапливать сигналы одного звена, но уже в меньшем, по сравнению с заданным, количестве, гибко применяясь к условиям обработки, а при поступлении одинакового количества чередующихся сигналов противоположных знаков - не выдавать команды на подналадку.Это позволяет в условиях приработки инструмента и нагрева станка, сопровождающихся интенсивным ростом систематических погрешностей обработки, при одновременном проявлении случайных погрешностей, вызывающих появление сигналов противоположного знака, участить количество подналадок в сторону компенсации наиболее часто проявляемых погрешностей и в то же время не реагировать на появление отдельных случайных отклонений противоположного знака. 1. Способ автоматической поднаколичества и в зависимости от этого величина зазора между звень-ями;заданное количество накапли-ваемых отклонений;величина подналадочного перемещения привода подналадкипосле поступления одного отклонения;передаточное отношение цепи от привода подналадки до звена, выполненного с пазом, 13136491313649 7 б Составитель В. АлексеенкоТехред Л.Сердюкова Корректор С,Черни Редактор Т. Парфенова Подписное Тираж 787 ВИИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д.
СмотретьЗаявка
4054256, 10.01.1986
КИЕВСКОЕ СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО МНОГОШПИНДЕЛЬНЫХ АВТОМАТОВ
ДОНСКОЙ ВАДИМ ЭМИЛЬЕВИЧ, ЛАНДА ГЕНРИХ ЛЬВОВИЧ
МПК / Метки
МПК: B23Q 15/00
Метки: автоматической, инструмента, подналадки
Опубликовано: 30.05.1987
Код ссылки
<a href="https://patents.su/6-1313649-sposob-avtomaticheskojj-podnaladki-instrumenta-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматической подналадки инструмента и устройство для его осуществления</a>
Устройство автоматического управления приводом подачи электрода-инструмента в электроэрозионных станках

Номер патента: 1710238
Опубликовано: 07.02.1992
Авторы: Беслик, Васильев, Отто, Полуянов
МПК: B23H 7/18
Метки: подачи, приводом, станках, электрода-инструмента, электроэрозионных
...(не показаны),Устройство работает следующим образом,На холостом ходу напряжение на эрозионном промежутке и сопротивление эрозионного промежутка больше заданныхблоком задания эталонных сигналов и первое и второе устройства 5 и 6 сравнениявыдают сигналы на подвод электродов. Та,как обработка отсутствует (нет рабочих и ипульсов), датчик 10 начала обработки черезвторой интегратор 11 устанавливает коэффициент передачи усилителя 9 с регулируемым коэффициентом усиления равным 5 10 15 20 25 30 35 нулю и сигнал с первого устройства 5 сравнения не поступает на сумматор 7, Движение привода осуществляется по сигналу с второго устройства 6 сравнения,При появлении рабочих разрядов датчик 10 начала обработки через второй интегратор 11 выдает...
Привод звена резонансной механической руки

Номер патента: 1219341
Опубликовано: 23.03.1986
Авторы: Акинфиев, Саламандра
МПК: B25J 18/00
Метки: звена, механической, привод, резонансной, руки
...что позволяет перео.цть с ИСТЕМу ИЗ ОДНОГО КрайЕГО ПОЛО- ЖЕНИЛ .,ИСХОДНОЕ ПОЛОЖЕНИЕ, ф 1 КСИОУсСМОЕ у (ром 1, х Яр я ктериз уем ОГО;3 Япасоъ 1 и Отсццияльной энергии упругих элементов, в друГо(", также хярсктеризуем(с запасом потснц,: с 3,3 ы(ОЙ эц СР Ги ц. Ь 70 М С Ус 13(., сСЛЬ Б Яса,Ьс ЫЙ МО- мсцт или ц резулыат(. случайного сбоя .31 С;О ОКсЖС 3 С 53 В ППОМЕЖ УГ ОЧНОМ ЦОЛОЖСЦЦЦ 1) СОСТ 0533 И 1 ПОКОЯ, СО с)БТО 37 ЧЕ(3(3 В ВВ ,(и Г Ц ИСХОДНОЕ ЦОЛОЖ(ЦЦС С ПО- .1( ЦЬ 10 -,3 СКРОДВП Г(ГС.Я, Д.Я 1 Е ГО 3 ЯСКЯЦВ ЬОТ ЗЬЕНО, ЦОЦ ЕРЕМЕЦО ВКЛ ОЯЯ И ВЫ(ЛК)- чая днигатель с чзстотои, олизкой к цяско;сосНИЙ мсхзнивской СИСЕМЬ, 1 РИ ЭТОМ ДЯ ВьВ(ДЕНИ 51 ЗВСНО 5 10 15 20 25 30 35 40 45 50 55 В исходное положение и взведсния аккумулятора...
Устройство формирования опорных сигналов системы управления приводом с асинхронной короткозамкнутой машиной

Номер патента: 653709
Опубликовано: 25.03.1979
Авторы: Андриенко, Бродовский, Дацковский, Жилин, Иванов, Тарасенко
МПК: H02P 5/34
Метки: асинхронной, короткозамкнутой, машиной, опорных, приводом, сигналов, системы, формирования
...опорных сигналов содержит векторный анализатор 10, блок апериодических звеньев 11 блок модуляторов 12, фазированные выпрямители 13, 14, выходы которых подключены к векторному анализатору 10. Источник опорного нанряжения 15 подключен к блокам 12, 13, 14. Выходы тахогенератора 9 и блока регуляторов 3 подключены к блоку коррекции 16, . связанному с блоком апериодических звеньев 11.Блок, дросселей 6 содержит по одному дросселю в каждой фазе. Кроме основной обмотки каждый из дросселей родержит по дополнительной измерительной обмотке. На фиг. 1 укаэанные измерительные обмотки выделены в блок эквивалентных напряжений ротора 17.Анализ схемы по фиг. 2 показывает, 3 что сигналы на выходе блока апериодических звеньев 1 1 (напряжение на...
Демодулятор взаимоортогональных синусоидальных сигналов с фазоразностной модуляцией
Номер патента: 1277423
Опубликовано: 15.12.1986
Автор: Хвостунов
МПК: H04L 27/22
Метки: взаимоортогональных, демодулятор, модуляцией, сигналов, синусоидальных, фазоразностной
...на вход сумматора 14 последовательно поступают пары значений М. и , (Т), а. на выход - разность фаз которая поступает (9 разрядов) на перекодирующий блок 15. Перекодирующий блок 75 решает две задачи: вычисляет дополнительные наег фазы Ь уопределяет по величинеФ Удинформационные разряды 1 е, при этом для однократной относительной фа-. зовой модуляции (ООФМ), двухкратной относительной фазовой модуляции (ДОФМ) и трехкратной относительной фазовой модуляции (ТОФМ) значения ди 1 е определяются какйАлгоритм формированияь Ч.,ясен иэ.13рйсунка, необходимо лишь учесть: весовосьмого разряда - 180 , вес седьмогооразряда - 90 и т,д.; вес младшего360 оН 11 разряда = 0,703 . Сигнал "ТОФМ" равен логической "1", когда демодулятор принимает...
Фотокопировальная система

Номер патента: 484067
Опубликовано: 15.09.1975
Авторы: Вайнер, Зикеев, Соцков, Темерев
МПК: B23Q 35/00
Метки: фотокопировальная
...19 связан также со вторыми входами усилителей мощности 8 и 9.Работает фотокопировальная система следующим образом,Обрабатываемую деталь 25 устанавливают на двухкоординатный исполнительный механизм б. На копировальный столик 7 устанавливают чертек-копир 26, на котором нанесена проекция (линия 27) пространственной траектории движения рабочего органа 23 относительно детали 25 на плоскость, проходящую через первую и вторую координатные оси исполнительного механизма, а на фотослсдящий столик 17чертеж 28, на котором нанесена линия 29, одна из координат каждой точки которой (например, точки ) соответствует сумме абсолютных значений разностей координат точек линии 27, нанесенной на чертеже-копире 26, начиная от начальной точки а до...
Предыдущий патент: Устройство для измерения сил резания
Следующий патент: Устройство для управления позиционирующим механизмом
Случайный патент: Способ получения покрытия