Цифровая система для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
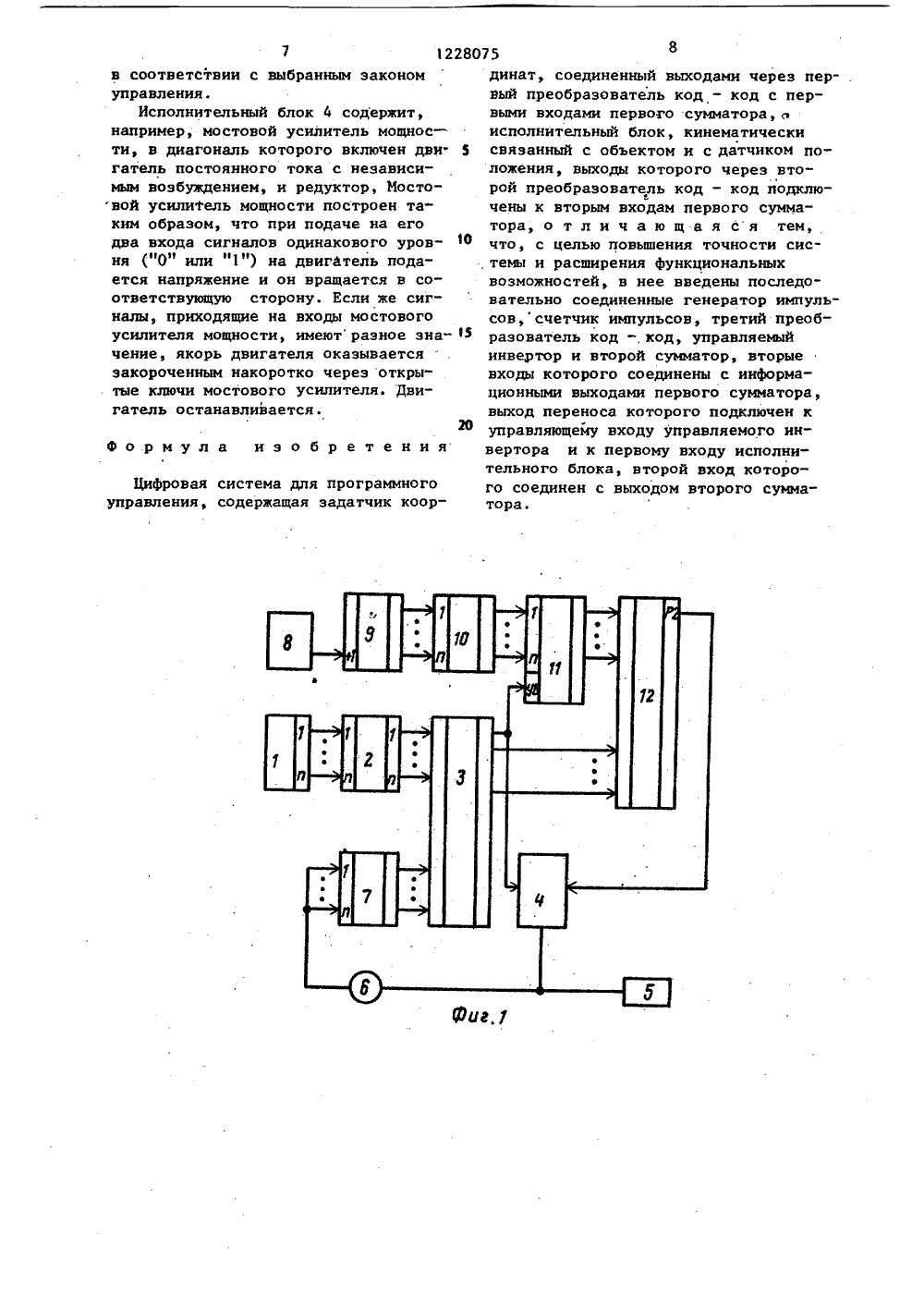
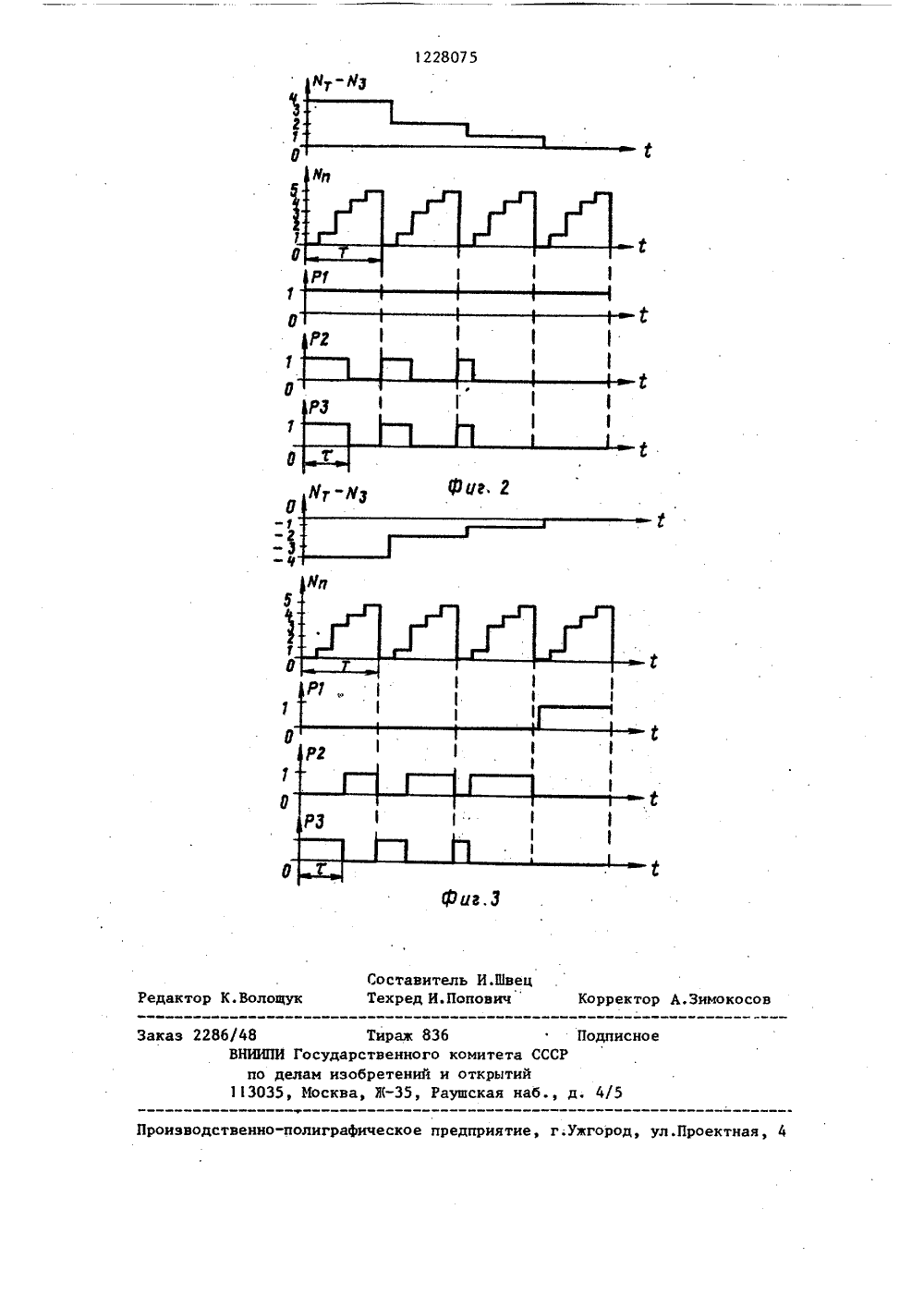
СОЮЗ СОВЕТСОЦИДЛИСТИЧРЕСПУБЛИН 80 А 28 15 4 С 05 В 19/1 БРЕТЕНИЯ СА ЦГр 1,Ц МВЛ 0,(71) Ленинградский ордена Ленина и ордена Красного Знамени механическийинститут(56) Авторское свидетельство СССРФ 624210, кл. С 05 В 9/18, 976.Авторское свидетельство СССРВ 999013, кл. С 05 В 11/01, )98).(54) ЦИФРОВАЯ СИСТЕМА ДЛЯ ПРОГРАИИНОГО УПРАВЛЕНИЯ(57) Изобретение относится к автоматике и может быть использовано в различных цифровых системах регулирования и управления, например, дляуправления манипулятором. Целью изобретения является повышение точности ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ВТОРСКОМУ СВИ системы за счет устранения колебаний объекта около положения равновесия путем введения линейного законауправления и расширения функциональных возможностей системы. Цифроваясистема для программного управлениясодержит задатчик координат, соединенный выходами через первый преобразователь код - код с первыми входами первого сумматора, исполнительный блок,кннематнческн связанный с объектом идатчиком положения, второй преобразователь код - код и введенные последовательно соединенные генератор импульсов, счетчик импульсов, третий преобразователь код - од, управляемый ин"вертор и второй сумматор. Введеннаяцепь указанных признаков првдназначена для формирования закона управления объектом, позволякицего повыситьточность приведения объекта в заданное положение, 3 ил. ) табл.Изобретение относится к автоматике и может быть использовано в различных цифровых системах регулирования и управления, например для управ-, ления манипулятором.Целью изобретения является повышение точности системы эа счет устранения колебаний объекта около положения равновесия путем введения линейного закона управления и расширение функциональных возможностей системы.Для устранения колебаний объекта около положения равновесия и, следовательно, для повышения точности работы устройства закон управления предлагается сделать не двухуровневым, как в прототипе, а с плавным линейным изменением уровня сигнала управления исполнительным блоком от максимума до нуля. При таком законе изменения управляющего сигнала в положении равновесия (БИ ) скорость объекта будет нулевой и, следовательно, не будет перерегулирования. Скорость объекта может быть нулевой в положении равновесия, так как управляющий сигнал, а следовательно, и скорость объекта плавно уменьшаются при приближении к положению равновесия.Коэффициент пропорциональности в линейной зависимости сигнала управления исполнительным блоком от сигнала ошибки Н, -М выбирается в зависимости от степейи инерционности объекта. Такимобраэом, можно управлять объектами с разной инерционностью, что расширяет функциональные возможности устройства. Величина коэффициента пропорциональности в линейной зависимости сигнала управления исполнительным блоком от сигнала ошибки Н -К реализуется преобразователем т10 код - код. На фиг.1 представлена функциональная схема цифровой системы; на фиг.2 и 3 - эпюры, поясняющие работу устройства.Цифровая система содержит задатчик координат 1, первый преобразователь 2 код - код, первый сумматор 3, исполнительный блок 4, кинематически связанный с объектом 5 и датчиком положения 6, второй преобразователь 7 код - код, генератор импульсов 8, счетчик импульсов 9, третий преобразователь 10 код - код, управляемый инвертор 11 и второй сумматор 12.На фиг,2 и 3 обозначено: М, - кодтекущего положения объекта; Н - заданный код положения; Р, - выход переносапервого сумматора; Р, - выход переноса второго сумматора.Задатчик координат может быть выполнен, например, в виде буферного Орегистра, выходы которого являютсявыходами задатчика координат, а егоинформационные входы через тумблеры подключаются к источнику напряжения, соответствующего значению"1" или "0". Синхровход буферногорегистра через кнопку подключаетсяк источнику напряжения, соответст 11 11вующего значению 120Запись набранного с помощью тумблеров двоичного кода в буферный регистр осуществляется нажатием кнопки,Записанное в буферный регистр значение кода постоянно присутствует на 25 выходе регистра и может быть считанов любое время. Буферный регистр мо.жет быть реализован, например, намикросхемах К 155 ТМ 8.Управляемый инвертор 11 инвертирует (преобразует в обратный и передает на выход в инверсном виде параллельный код, приходящий на его вход,при значении сигнала на его управляющем входе, равном "1", и передаетбеэ изменения на выход код, по тупивший на его вход, при значении сигнала на его управляющем входе равном"0". Управляемый инвертор 11 введенв устройство для выполнения операциивычитания на сумматоре 2 независимо от знака разности М,-Н вычисляемой на сумматоре 3. Управляемый инвертор 11 может быть реализован, например, на элементах ИСКЛЮЧАЮЩЕЕ ИЛИ(микросхема К 155 ЛП 5), Выходы этих 45элементов образуют разряды выхода управляемого инвертора 11. Один иэ входов каждого элемента ИСКЛЮЧАЮЩЕЕИЛИ является разрядом входа управляемого инвертора 11. Другие входы этихэлементов объединены и образуют управляющий вход управляемого инвертора 11. Сумматор выполняет операцию вычи тания, если на один его вход подается прямой ход уменьшаемого числа, а на второй его вход подается дополнительный код вычитаемого числа илиобратный код этого числа. В случаеподачи обратного кода вычитаемогочисла разность получается на единицу меньше младшего разряда. Подачанужных кодов на входы сумматора 12 . 5ббеспечивается тем, что при появлении на выходе сумматора 3 прямого кода, подаваемого на первый вход сумматора 12, на выходе переноса Р сумматора 3 появляется сигнал "1" кото- О рый поступает на управляющий вход управляемого инвертора 11. При этом управляемый инвертор 11 в соответствии с логикой своей работы подает на второй вход сумматора 12 обратный ,код. В случае появления на выходе сумматора 3 дополнительного кода, поступающего на первый вход сумматора 12, на выходе переноса Р 1 сумматора 3 появляется сигнал "0", который 2 О поступает на управляющий вход управляемого инвертора 11. При этом управляемый инвертор 11 подает на второй вход сумматора 12 прямой код.Система работает следующим обра 25 , зом. Координаты объекта 5, задаваемые задатчиком 1 в некотором .цифровом коде, преобразуются преобразователем 2 код - код в стандартный двоичный код И , инвертированное и дозфлполнениое значение которого БзЙ +поступает на входы второго35 числа сумматора 3. Координаты текущего положения объекта 5 воспринимаются датчиком б положения объекта 5 и выдаваемые в некотором цифровом коде преобразуются преобразователем 7 4 О код - код в стандартный двоичный код Ит, поступающий на входы первого числа сумматора 3, В результате выполнения операции сложения координаты заданного положения и дополнительно" 45 го кода координаты текущего положения (Ит + И , что соответствует вычитанию И - И ), на выходах сумматора 3 устанавливается код разности координат И -Ид в прямом коде Я, ес" 5 О ли эта разность не меньше нуля(И И ), при этом на выходе переноса. устанавливается сигнал Р 1=1 или "лев дополнительном коде 81, если этаразность меньше нуля (И, И ), при 55 этом на выходе переноса устанавлива" ется сигнал Р 1=0. Направление перемещения объекта 5 определяется зна-. чением сигнала 21 поступающего в исполнительный блок 4.лКод разности 31 или 81 координат И и И с выхода сумматора 3 поступает на вход первого числа сумматора 2, На вход второго числа сумматора 2 поступает прямой И или обратньй код И, формирующийся в результате последовательного прохождения сигналов через ряд устройств, а именно: генератор импульсов 8 вырабатывает последвательность импульсов с частотой, Е, которые поступают на вход двоичного счетчика 9, имеющего п разрядов. С выхода счетчика 9 периодическинарастающие с частотой РЪиЕ/2 двоичные коды поступают на вход преобразователя 10 код - код, где изменяются в соответствии с принятым законом управления объектом. С выхода преобразователя 1 О коды И, периодически изменяющиеся по закону, определяемому преобразователем 10, поступают на вход управляемого инвертора 11, на управляющий вход которого поступает сигнал переноса Р с выхода сумматора 3. В зависимости от . уровня сигнала Р 1 управляемый инвертор преобразует код И в прямой код И, если Р 1=0, или в обратный код Й, если Р 1=1, который поступает на первые входы сумматора 12. На вторые входы сумматора 12 поступает кодм81 или 81. Таким образом, если разность координат текущего положения и заданного меньше нуля, что соответствует низкому уровню сигнала Р (Р 1=0), то эта разность в дополнительном коде суммируется с периодически изменяющимся кодом И, который проходит без изменений через управляемый инвертор на входы второго сум-матора 12. Если разность координат текущего положейия и заданного не меньше нуля, что соответствует высокому уровню сигнала Р 1 (Р 1 1), то эта разность в прямом коде суммируется с Йп-периодически изменяющимся инверсным значением кода И , которое проходит на входы сумматора 12 с выхода управляемого инвертора 11На" сумматоре 12 производится операция сложения 81+Й, если И, -И ъ О ( Р 1 1) или 81+И, если Ит-И 4 0 ( Р 1 0),.что соответствует сложениюИ с разностью И и И , если этаразность меньше нуля, и вычитанию 1,тединицу, если эта разность не меньше.нуля. Сложение 81 с обратным кодом Я, а не с дополнительным Я при Р 1=1, позволяет уменьшить зону нечувствительности до единицы младшего разряда кода координаты объекта.Такая операция сложения обеспечивает формирование сигнала переноса Р 2 на выходе сумматора 12 в соответствии со следующей таблицей. Значения Р 2 в таблице получаютследующим образом. При Я -Я сО на выходе сумматора 12 имеем результат:82=81+Я=Я-/Я -Я 1, На выходе переноса Р 2 сумматора 12 формируется сигнал Р 2=1 при 82 О, т.е, при Я,з3 Ь -Я 1, или Р 2=0 при 82 О, т.е, 35при Яф Я -ЯПри Я -Яр О на вы-,ходе сумматора 12 имеем результат:82 81+Я 1,. При этом сумматор 12 выпол,няет эту операцию сложения как сло, жение 81 с дополнительным кодом нелкоторого числа Я 1: 82=81+Я 1. ТогдаЯ Я, или 2 -1-Я+1 ф 2 -1-Я . Отсюда Я Яд+1 82 81 Я Я Яз (Яд+1)Тогда на выходе переноса Р 2 суммато-;ра 12 формируется сигнал Р 2=1 при 4582О, т.е. при Я с Я -Я -1, илиР 2 О при 82 сО, т,е. при Яд Я -Я --1Так как исполнительный блок разблокирован только при совпадении зна чений сигналов Р 1 и Р 2, то из таблицы следует, что он разблокирован втечение той частипериода времениТ 1/Ря, когда Я,1 С/Ят -Я 1 приЯ,-Я (О (фиг.3)или ЯЯ -Я -1 при 55Ят-Я )О (фиг.2) где Р 3=1 соответствует разблокированному исполнительному блоку, а РЗ О - заблокированному. При этом за счет инерционности исполнительного блока скорость перемещения объекта пропорциональна отнолшению/Т, а направление перемещения определяется значением Р 1. Закон изменения(величины. времени, в1 течение которого за период Т = - исполнительный блок устройства разблокирован;зависит от разности заданной и текущей координат объекта 5) отЯ -Я определяется преобразователем кода 10 и может быть выбран различным для разных объектов.При 1 и -Я,Я где Я максимальное значение Я, исполни тельный блок 4 разблокирован в течение всего периода 1 и перемещает объект 5 с максимальной скоростью. Период Т повторения кодов счетчика 9 должен выбираться достаточно .маленьким пб сравнению с постоянной времени исполнительного блока. Исполнительный блок перемещает объект 5 и датчик положения 6, который выдает новое значение координат текущего положения объекта, подаваемое через преобразователь 7 на входы первого числа сумматора 3. Сумматор 3 формирует новый код разности текущего и заданного положения объекта. При совпадении кодов текущего и заданного значений положения объекта код разности на выходе сумматора 3 становится равным нулю. В этом случае при любых значениях кода Я сохраняются значения сигналов переноса Р 1=1 и Р 2=0, которые поступают на исполнительный блок 4 и блокируют его, Время разблокировкиисполнительного блока етановится равным нулю и перемещение объекта заканчивается в заданном положении. Введенная в цифровую систему .цепь, содержащая генератор импульсов 8, счетчик 9 импульсов, третий преобразователь код - код 1 О, управляемый инвертор 11 и второй сумматор 12, предназначена для формирования закона управления объектом, позволяющего повысить точность приведения объекта в заданное положение. Введенная цепь необходима для преобразования разности текущей и заданной координат объекта в сигнал управления исполнительным блоком 412280 в соответствии с выбранным законом управления.Исполнительный блок 4 содержит, например, мостовой усилитель мощнос - ти, в диагональ которого включен дви. 3 гатель постоянного тока с независимым возбуждением, и редуктор, Мостовой усилитель мощности построен таким образом, что при подаче на его два входа сигналов одинакового уров ня ("0" или "1") на двигатель подается напряжение и он вращается в соответствующую сторону. Если же сигналы, приходящие на входы мостового усилителя мощности, имеют разное зна чение, якорь двигателя оказывается закороченным накоротко через открытые ключи мостового усилителя. Двигатель останавливается.20 Формула изобретения Цифровая система для программногоуправления, содержащая задатчик коор 75динат, соединенный выходами через первый преобразователь код - код с первыми входами первого сумматора,исполнительный блок, кинематически связанный с объектом и с датчиком положения, выходы которого через второй преобразователь код - код подключены к вторым входам первого сумматора, о т л и ч а ю щ а я ся тем, что, с целью повышения точности сис, темы и расширения функциональных возможностей, в нее введены последовательно соединенные генератор импульсов,счетчик импульсов, третий преобразователь код в , код, управляемый инвертор и второй сумматор, вторые входы которого соединены с информационными выходами первого сумматора, выход переноса которого подключен к управляющему входу управляемого инвертора и к первому входу исполнительного блока, второй вход которого соединен с выходом второго сумматора.1228075 Фиг Составитель И.ШвецРедактор К.Волощук Техред И. Попович ректор А.Зимокосо сно ака Проек афическое предприятие, г.Ужгор роизводственно-по 286/48 Тираж 836 ВНИИПИ Государственного по делам изобретений и 313035, Иосква, Ж, Ра
СмотретьЗаявка
3773432, 13.07.1984
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА И ОРДЕНА КРАСНОГО ЗНАМЕНИ МЕХАНИЧЕСКИЙ ИНСТИТУТ
БЕЛЯКОВ ГЕОРГИЙ МИХАЙЛОВИЧ, ВЕСЕЛОВ ВЯЧЕСЛАВ АФАНАСЬЕВИЧ, ГРОБОВОЙ РОМАН НИКОЛАЕВИЧ, ЗЛАТОРУНСКИЙ НИКОЛАЙ КОНСТАНТИНОВИЧ, КОНОНОВ ОЛЕГ АЛЕКСАНДРОВИЧ, ОСИПОВ ВАЛЕРИЙ ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного, цифровая
Опубликовано: 30.04.1986
Код ссылки
<a href="https://patents.su/6-1228075-cifrovaya-sistema-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Цифровая система для программного управления</a>
Устройство для управления включенными параллельно по входу и выходу n статическими преобразователями частоты

Номер патента: 1665479
Опубликовано: 23.07.1991
Авторы: Артюхов, Величкина, Желев, Серветник, Томашевский
МПК: H02M 5/44
Метки: включенными, входу, выходу, параллельно, преобразователями, статическими, частоты
...случае появляется сигнал логической единицы:на выходе компаратора 16 и происходит подача импульса на вычитающий вход счетчика 31. Соответствующий выход логического блока 26 обнуляется, что приводит к выключению преобразователя.После каждой выдачи команды на вклю чение или отключение преобразователей производится повторный опрос компараторов 15 и 16, Для обеспечения устойчивой работы системы этот опрос производится с некоторой задержкой, определяемой эле ментом 25. Если за это время какой-либо из компараторов не изменил свое состояние, то происходит выдача команды на включение (или отключение) еще одного преобразователя. Импульсы на первый 27 и второй 28 входы логического блока 26 поступают до тех пор, пока будет выполняться одно из...
Фазометр

Номер патента: 661395
Опубликовано: 05.05.1979
МПК: G01R 25/00
Метки: фазометр
...суммы иразности колебаний из-за неидентичности коэффициентов. передачи детекторов в цепи обратной связи, обеспечивающей управление аттенюаторами напряжений, из-за конечного значениякоэффициента чувствительности управ-.ляемых аттенюаторов напряжений.Целью изобретения является повышение точности измерения малых Фазовыхуглов,Поставленная цель достигается тем,что в Фазометр, содержащий два атте661395 20 Составитель А, ПлетнеТех е Я,Ал ерова е акт иницка о екто техн сное 9/43ЦНИИПИпо д113035 Тираж 1089 .сударственного комитета ам изобретений и открыт ка осква ЖРа ская наб 4 тентфф, г, Ужгород ул, Проектна П(14) амплитудными детекторами В, 9имеем вь + "5 ЯЧ (15)где К - коэффициент передачи блокаделения двух напряжений,Точность...
Преобразователь напряжения в сигнал постоянного тока с гальванической развязкой входа и выхода

Номер патента: 382015
Опубликовано: 01.01.1973
Автор: Шапошников
МПК: G01R 19/22
Метки: входа, выхода, гальванической, постоянного, развязкой, сигнал
...с гальван входа и выхода, содержащ делптельный трансформат от.гггчаоцггйся тем, что, с ц ,о мощности, потребляемой от ения в сигнал по 1 ческой развязкой ш модулятор, разор ц демодулятор, елью уменьшения измерительной цеИзобретение Отцосттся к 00111 стц автоматики ц измерительной техники ц может быть 1 спользовацо для преобразования электрических с 1 Гцалов, зядяццых цяпря)иенцем, В сцгЯл постоянного тока,Известны преобразователи напряжен:.я в сигндл постоянного тока с гальванической развязкой входа и выхода, состоящие из модулятора, разделительного трансформатора и демодулятора. Однако в этих преобразователях для преобразования напряжения в ток используют большие активные сопротивления, включенные последовательно с нагрузкой, при этом...
Устройство для контроля входа и выхода рабочих и служащих

Номер патента: 615514
Опубликовано: 15.07.1978
Авторы: Козинцев, Морозов, Покидаев, Шаровар
МПК: G07C 1/10
Метки: входа, выхода, рабочих, служащих
...открывается сигналом, вырабатываемым формирователем 13 опроса регистра анализа, Появившийся сигнал на ее выходе проходит через элемент ИЛИ 25 на формирователе 8 выходной информации, который под действием этого сигнала вырабатывает ответную информацию, разрешающую вход на объект по шйне 12, й сигйал 5 10 15 20 25 30 35 40 45 50 55 60 65 на элемент И 40. Элемент И 40, подготовленный по другому входу блоком 1 приема команд, срабатывает и появившийся сигнал на его выходе поступает через элемент ИЛИ 42 на элементы И 30, 31 блока 10 корректива и через элемент ИЛИ 6 на блок памяти 9 и второй формирователь 18 сигналов управления блоком памяти, В результате избирательная схема 31 выбранного дешифратора 4 информативного узла 27 срабатывает...
Устройство для адаптивного программного управления положением объекта

Номер патента: 622054
Опубликовано: 30.08.1978
Авторы: Крутов, Миронов, Николенко, Осипов
МПК: G05B 19/32
Метки: адаптивного, объекта, положением, программного
...управления. Аналоговая величина с выхода прсобразо вателя 4 поступает в следящий привод 5, который изменяет угловое положение объекта до тех пор, пока цифровой сигнал рассогласования не будет равен нулю. Это соответствует установке объекта б в заданное 10 угловое положение. Однако блоки, входящие в канал программного управления, в частности, преобразователи 4, 8, датчик угла 7, привод 5 имеют конечную точность. Это приводит к ошибке Лр, в угловом по ложении объекта управления;М = 9 зад 9Ошибка Лр является величиной случайной и может принимать различные значе ния для различных угловых положений и различных условий эксплуатации аппаратуры. Наличие ошибки Ьр, вызывает умень-. шение показателя качества. На выходе экстремального...
Предыдущий патент: Устройство для управления роботом
Следующий патент: Устройство для программного управления
Случайный патент: Устройство для изготовления армированных полимерных материалов