Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки






Текст
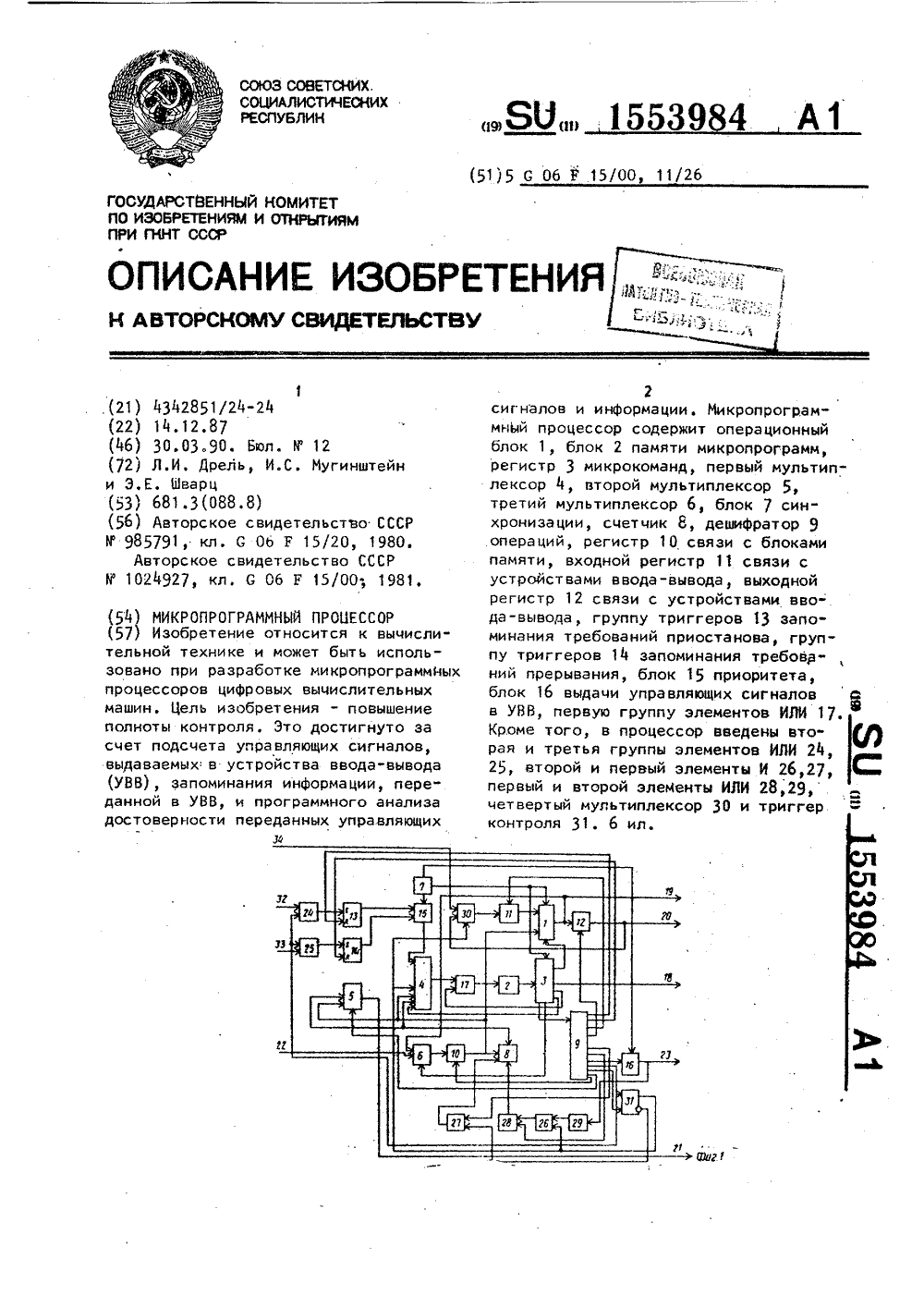
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХ СПУБЛИН 4 С 05 В 1 ИЗОБРЕТЕН ТЕПЬСТ АВТОРСКОМУ С СС 98 П. Теоегули 273-282устройго упева.109 посту ил. ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРО ДЕЛАМ ИЗОБРЕТЕНИЙ ИОТНРЫТИЙ(56) Авторское свидетельство11 1012194, кл. 6 05 В 11/01,Бесекерский В.А Попов Ерия системы автоматическогорования, М.: Наука, 195, с.Нелинейные корректирующиества в системах автоматическравления. Под. ред. Ю.И.ТолчМ.: Машиностроение, 1971, с.112, рис. 111.2.(57) Изобретение относится к приборостроению и техническим средствам автоматического управления и может найти широкое применение при управлении инерционными объектами, например, землеройными машинами. В системе решается задача компенсации инерционности объекта регулирования, переключения скоростной обратной связи на основании информации о знаке произведения сигнала рассогласования и скоростной обратной связи и об уровнях этих сигналов. Эта задача решается следующим образом. Сигнал задания сравнивается с регулируемой координатой в измерителе рассогласования, на выходе которого Формируется сигнал рассогласования. Он усиливается в предварительном усилителе и поступает на первый вход первого сумматораЯО 1216773 где суммируется с выходным сигналом второго сумматора, Выходной сигнал первого сумматора усиливается в усилителе мощности и воздействует на исполнительный двигатель, который через редуктор воздействует на объект регулирования, меняя регулируемую координату, Скорость вращения вала двигателя измеряется тахогенератором. Выходной сигнал последнего поступает на первый вход первого умножителя, в котором умножается на модуль выходного сигнала усилителя, и на первый вход второго умножителя, в котором умножается на выходной сигнал усилителя. Выходной сигнал второго умножителя через релейный элемент поступает на управляющий вход первого ключа, который управляет подключением выходного сигнала к первому входу второго сумматора. Модуль выходного сигнала усилителя и выходные сигналы второго умножителя и источника постоянного сигйала поступают на входы блока управления, который с помощью второго ключа управляет подключением выходного сигнала тахогенератора к второму входу второго сумматора, В блоке управления определяется знак выходного сигнала второго умножителя с помощью первого компаратора. И, кроме того, в нем сравниваются величины выходных сигналов усилителя и источника постоянного сигнала с помощью второго компаратора. Выходные сигналы компараторов через элементы И и НЕ пают на вход блока управленияИзобретение относится к приборостроению и техническим средствамавтоматического управления и можетнайти широкое применение при управ"ленин инерционными объектами, например землеройными машинами,Целью изобретения янляется повышение динамической точности и быст"родействия системы.На Фиг. представлена Функциональная схема системы; на фиг.2диаграммы сигналов, поясняющиепринцип работы системы; на фиг, 3 -принципиальная схема блока управления.Система содержит измеритель 1рассогласования, усилитель 2, первый сумматор 3, усилитель 4 мощности, исполнительный двигатель 5,редуктор 6, детектор 7, второй сумматор 8, второй ключ 9, тахогенератор О, блок 11 управления, источник 12 опорного сигнала, первыйумножитель 13, первый ключ 14, второй умножитель 15, задатчик 16,реле 17, первый 18 и второй 9 компараторы, элемент И 20, элемент НЕ21, общую шину 22; - выходной сигнал -го функционального блока или элемента;К - коэффициент местно обратнойоссвязи системы,В состав блока 11 управления нходят два компаратора 18 и 19, элемент И 20, элемент НЕ 21 и общаяшина 22.В качестве детектора 7 может бытьприменен линейный детектор, имеющийхарактеристику типа "Выделение мо"дуля".Система работает следующим образом.Выходной сигнал ,6 задатчика 16подается на первый вход измерителя1 рассогласования, на второй входкоторого поступает выходной сигнал1 редуктора б, а на его выходеформируется сигнал рассогласования1 = 0,6 - 6. Этот сигнал П подается на вход усилителя 2, на выходекоторого Формируется сигнал Б щК У 1, где К - коэффициент передачи усилителя 2.Сигнал Б поступает на первый,вход первого сумматора 3, на второйвход которого поступает выходной сиг"нал Б второго сумматора 8, а на еговыходе формируется сигнал 1-,216773 2 Сигнал 115 поступает на вход усилителя 4 мощности, на выходе которого Формируется сигнал Б= Кц гдеД э К - коэффициент передачи усилителя 4 мощности. Сигнал П поступает на вход исполнительного двигателя 5, на выходе которого Формируется сигнал Н = К Б, где Кь - коэффициент передачи исполнительного двигателя 1 О 5, Сигнал 06 поступает на вход редуктора 6, на выходе которого формируется сигнал ь = К Б где К6 5 6 коэффициент передачи редуктора 6, который поступает на второй вход из мерителя 1 рассогласования. Кроме того, сигнал Ц 5 поступает на вход тахогенератора 10, на выходе которого формируется сигнал Б, = К Бз1 о Бгде К, - коэффициент передачи тахо генератора 10.Сигнал У с выхода тахогенерато" ра 10 поступает на первый вход первого умножителя 13, на второй вход которого поступает выходной сигнал Б 25 детектора 7, а на его выходе Формируется сигнал Б = Б,с, 1 = 01 о 02,Кроме того, сигнал Б, поступаетна первый вход второго умножителя З 0 15, на второй вход которого поступает выходной сигнал Б усилителя 2, а на его выходе формируется сигнал 015 = 01 О Б. Сигнал У, поступает на вход реле 17, на выходе которого 35 ф рмируе с я сигнал У 1 т В ида1, если Б )О, 011О, если 1 с О, 40 Сигнал Б поступает на управляющий вход первого ключа 14, на инФормационный вход которого поступает сигнал Бз с выхода первого умно- жителя 13, а на его выходе форми руется сигнал Б 1 вида1, если и = 1 цО, еслибы, =О 50 Выходной сигнал Б второго умно- жителя 15 поступает на второй вход блока 11 управления и далее на сиг нальный вход первого компаратора 18, входящего н блок 11 управления. Опоо ный вход первого компаратора 8 подключен к общей шине 22. На выходе перного компаратора 18 формируетсясигнал Бз вида1 Ф если Б 5 О, У,9О, если 0,560.Выходной сигнал 117 детектора 7 поступает на первый вход блока 11 управления и далее на сигнальный вход второго компаратора 19, входящего в блок 11 управления. Выходной сигнал 1; источника 12 опорного сигнала поступает на третий вход блока 11 управления и далее на опорный вход второго компаратора 19, на выходе которого формируется сигнал видаесли Б 7 ) П 1О, если У ( БВыходные сигналы Ци П 1 компараторов 18 и 19 поступают на входы элемента И 20, на выходе которого формируется сигнал вида 1, если 11 =1 и Б, =1, О, во всех остальных случаях,Выходной сигнал Ус, элемента И 20 поступает на вход элемента НЕ 21, на выходе которого формируется сигнал Б, видаесли 020 О, Б,О, если Уо = 1.Выходной сигнал Ц элемента НЕ 2 является выходным сигналом блока 11 управления, т.е. 011 =01Сигнал Б 1 с выхода блока 11 управления поступает на управляющий вход первого ключа 9, на информационный вход которого поступает сигнал Б 1 с выхода тахогенератора 10, а на его выходе формируется сигнал У 9 видаБ, , если Б 1, 119О, если Б= О.Выходной сигнал У 9 второго ключа 9 поступает на второй вход второго сумматора 8, на первый вход которого поступает выходной сигнал У первого ключа, а на выходе второго сумматора 8 формируется сигнал Б 9 = = Уз - Б, который поступает на второй вход первого, сумматора 3, В дальнейшем система работает аналогично.Принцип коррекции данной системы заключается в следующем. Сигнал 11, подаваемый на вход измерителярассогласования, отслеживается исполнительным двигателем 5, причем его быстродействие зависит от корректирующего сигнала обратной связи по скорости поворота выходного вала, суммированного в определенные моменты времени с форсирующим сигналом, пропорциональным произведению сигналов, пропорциональных модулю сигнала рассогласования и скорости поворота выходного вала, и с сигналом рассогласования. Причем корректирующий сигнал отрицательной обратной связи формируют с момента, когда модуль сигнала рассогласования равен допустимой величине динамической ошибки следящей системы, определяемой из ее требуемых точностных характеристик в установившемся режиме работы, при положительном произведении сигналов, пропорциональных сигналу рассогласования и скорости поворота выход" ного вала системы, до момента, когда скорость меняет знак с отрицательного на положительный. Таким образом, демпфирование колебаний в следящей системе начинается при входе в область допустимых отклонений угла поворота выходного вала системы и продолжается в четной .четверти колебаний, при этом улучшается торможение при непосредственном приближении к положению равновесия и во время удаления системы от состояния равновесия. В остальное время периода колебаний в системе отсутствует демпфирование с помощью корректирующего сигнала, что способствует более интенсивному разгону системы при ее движении к положению равновесия, за счет чего уменьшается колебательность и перерегулирование, повышается быстродействие системы. 5 1 О 15 20 25 30 35 40 45 50 5Сигнал управления формируется на сумматоре 3, для чего на его первый вход подается сигнал У = К (1116 - -КС),На его второй вход через второй сумматор 8 в цепи формирования корректирующего сигнала поступает сиг" нал, состоящий из двух составляющих: первой, пропорциональной скорости поворота выходного вала, подаваемой через второй ключ 9, второй пропорциональный произведению ППо, формируемому первым умиожителем 13в канале Формирования величины нелинейного сигнала коррекции, подаваемой через. первый ключ 14, причем цо = ц - ц. Условия Формирования сигналов Ц и Ц следующие:, при выполнении условий Ц ЦюО и ЦЦ(1) сигнал Ц =О, в противном случае Ц = Цы , при выполнении условия Ц 2 ЦоО (2) сигнал Ц = Ц, в противном случае сигнал Ц, = О.Анализ условий (1) производится блоком 11 управления, на входы которого поступают сигналы Ц, Ц 2 и Ц 5, Блок 11 управления при выполнении условий (1) закрывает ключ 9. Второе логическое условие Формируется с помощью реле 17, на вход которого поступает сигнал Цз = Ц 2 Цо Ключ 14 замкнут при выполнении усло" вия ( 2). На Фиг,2 изображены графики изменения сигнала рассогласования Ц, снимаемого с измерителя рассогласования 1, демпфирующего сиг нала Цо, пропорционального скорости поворота выходного вала системы; коэффициента местной обратной связи системы К а также отмечены четыре характерных момента времениВ первоначальный момент времени 1 отработки сигнала задания Ц 16 второй умножитель 15 в канале Формирования логического сигнала коррекции вырабатывает положительный сигнал, т.е, Ц 5 О и Ц,Ц 2. При этом блок 11 управления вырабатывает сигнал Ц= О, в результате чего второй ключ 9 находится в разом" кнутом состоянии и сигнал Ц,р, пропорциональный скорости поворота выходного вала системы, не проходит на второй вход второго сумматора 8 в цепи Формирования корректирующего сигнала, т.е. Ц = О, Кроме того, срабатывает реле 17, в результате чего замыкается первый ключ 14 и на первый вход сумматора 8 поступает сигнал Цц =Цз, Таким образом, при С с, 1 Ц 8 = -(1 з, В момент времени2 величина модуля сигнала рассогласования становится меньше допустимой, т.е. Ц С Ц, В результате этого на выходе блока 11 управления появляется сигнал Ц = 1, под воздействием которого второй ключ 9 открывается и демпфирующий сигнал Ц обратной связи с выходатахогенератора 10 поступает на второй вход второго сумматора 8, т,е,=- Ц 1 о . Таким образом, при 2 с "с "ь Цю = Ц Ц 1 ьВ следующей четверти колебаний, т.е. при выполнении условий Цс 0 реле 14 отпускает, первый ключ 17 размыкается и снимает сигнал Ц13 10 с первого входа второго сумматора 8, в результате этого при т с с с 13- й Ца =: Ц, При изменении знака произведения сигналов, пропорциональных сигналу рассогласования и скорости поворота выходного вала системы с отрицательного на положительный, т.е, при ЦО, реле 14 вновь сработает, замыкается первый ключ 17 и подает сигнал Цз на первый вход 20 второго сумматора 8, а блок 11 управления изменяет сигнал на своем выходе на ц, =0 и тем самым закрывает второй ключ 9, который снимает демпфирующий сигнал Ц со вто рого входа второго сумматора 8, т.е. вновь станет ЦЗ = -Ц 1 З . Глубину обратных, связей выбирают из условия обеспечения устойчивости системы в этом режиме. В дальнейшем цикл 30 Формирования сигнала коррекции Цц будет повторяться. Таким образом, сигнал Ц 3 на выходе первого сумматора 8 в цепи Формирования сигнала управления равен 35 ЦЗ Ц 2 Цв Ц 2 ЦЗ+ 1 Ц 13 Ц 2 11(110 + 2 Ц 7 Ц,10 - 112 ( 1 %7) " Ц 10Косц 1 огде К= Ч- Ч Ц; 40 1 при Ц 2 Цос 0 или Ц сЦпри Ц 2 Ц 1 о ) 0 или ЦтЦ 121, при ЦЫЦО ) О, Ч = 2О, приЦ Цо(0. График изменения К показан наосФиг.2. Изграфика видно, что на 5 О участке разгона г 1-С 2 местная обратная связь является положительной, на участке торможения-1 местная 12 обратная связвявляется отрицательной. Функционально блок 11 управле ния может состоять из двух компара" торов 18 и 19, элементов И 20, НЕ 21 и общей шины 22 (Фиг.З). Сигнал на выходе компаратора 18 появляетсяпри выполнении условия БО. Сигнал на выходе компаратора 19 появляется при выполнении условия Н 1 Ц . При наличии сигналов одновременно на выходах обоих компараторов 8 и 19 на выходе элемента И 20 появляется сигнал, который инвертируется элементом НЕ 21. Таким образом, формирует" ся сигнал Б, управления ключом 9.Данная нелинейная система содержит неизменную часть, которая описывается системой дифференциальных уравнений шестого порядка. Моделирование переходных процессов системы с помощью ЭВМ показывает, что указанные отличительные особенности изобретения позволяют уменьшить перерегулирование в системе и за счет этого повысить динамическую точность и быстродействие системы на 10-157 по сравнению с известной системой.формула изобретенияСледящая система, содержащая последовательно соединенные задатчик, измеритель рассогласования, усилитель, первый сумматор, усилитель мощности и исполнительный двигатель,соединенный выходом через редуктор с вторым входом измерителя рассогласования а через тахогенератор с первым входом первого умножителя 5 и с первым входом второго умножителя, подключенного вторым входом к выходу усилителя и входу детектора, соединенного выходом с вторым входом первого умножителя, подключенно- О го выходом к инФормационному входупервого ключа, соединенного управляющим входом через реле с выходом второго умножителя, а выходом через второй сумматор - с вторым входом первого сумматора, о т л и ч а ю - щ а я с я тем, что, с целью повышения динамической точности и быстродействия, в ней установлены источник опорного сигнала, второй ключ и блок управления, подключенный первым входом к выходу детектора, вторым входом - к выходу второго умножителя, третьим входом - к выходу источника опорного сигнала, а выходом к управляющему входу второго ключа,соединенного информационным входом с выходом тахогенератора, а выходом - с вторым входом второго сумматора.1216773 Составитель Й,ГлаРедактор П.Коссей Техред М,Надь Обручар оррек Подписи д, 4 л ППП "Патент", г.ужгород, ул.Проект Заказ 1001/58 Тираж ВНИИПИ Государствеино по делам изобретен 113035, Москва, Ж, 37 о комитетай и открытии Раушская на
СмотретьЗаявка
3786030, 30.08.1984
РОСТОВСКОЕ ВЫСШЕЕ ВОЕННОЕ КОМАНДНО-ИНЖЕНЕРНОЕ УЧИЛИЩЕ РАКЕТНЫХ ВОЙСК ИМ. ГЛАВНОГО МАРШАЛА АРТИЛЛЕРИИ НЕДЕЛИНА М. И
БОВКУН МИХАИЛ СТЕПАНОВИЧ, ЗАГАЙЧУК ВИКТОР ЛЕОНИДОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: следящая
Опубликовано: 07.03.1986
Код ссылки
<a href="https://patents.su/6-1216773-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Мкогоканальмый декодирующий преобразователь «цифровой код угол поворота вала»

Номер патента: 199505
Опубликовано: 01.01.1967
МПК: G05B 19/00, H03M 1/66
Метки: вала, декодирующий, код, мкогоканальмый, поворота, угол, цифровой
...зависит от значпости кода, а с другой стороны на нее влияет нестабильность усиления в усилителе следящей системы.Существует положительная вероятность того, что до окончания преобразования одного кода из ЦУМ поступят кодограммы, соответствующие всем остальным ЛД. Чтобы кодо- грамма не была потеряна и не получила отказ, опа должна быть помещена в отдельный регистр. Очередь образуется также в том случае, когда поток кодограмм детерминирован (для ЦУМ с жестким циклом работы), а длительность преобразования - случайная величина с некоторым законом распределения.Итак, после записи кодограммы в первом регистре триггер Т,разблокирует вентиль И, и после прихода импульса с выхода б РУ на выходе схемы И возникает импульс считывания, который...
Устройство для обмена данными между вычислительными машинами

Номер патента: 1203531
Опубликовано: 07.01.1986
Авторы: Авдейчик, Оборин, Романков, Чупрынников
МПК: G06F 13/00
Метки: вычислительными, данными, машинами, между, обмена
...105 шин 87 и 34 (фиг. 3). Пошине 34 этот уровень подключаеткомлутатор 13 (фиг, 1) для передачибайта состоянияБайт состояния Формирует формирователь 84 на основании единичных состояний триггеров164 и 165 (фиг. 6) и нулевого состояния триггера 137 (фиг. 5) . Нулевойуровень с выхода триггера 137 по цепи .160 шины 98, входящей в состав шины106 (фиг. 6), поступает в Формирователь 84 (Фиг. 3), где после инвертирования элементом НЕ 241 (фиг. 8)единичным уровнем поступает на вторые входы элементов И 237-240. Единичные уровни с выходов триггеров164 и 165 (Фиг. 6) соответственно поцепям 193 и 194 составной цепи 106поступают на первые входы элементовИ 239 и 240 (Фиг. 8), В результатеэтого единичный уровень с выходаэлемента И 239 как признак...
Многодвигательный электропривод

Номер патента: 1310988
Опубликовано: 15.05.1987
Авторы: Аристов, Гордеев, Литовченко, Назаров, Шаров
МПК: H02P 7/42
Метки: многодвигательный, электропривод
...скольжения с частотой на выходе первого делителя 13 частоты. Сигнал положительной разности поступает на суммирующий вход "+1" первого реверсивного счетчика 7, а при отрицательной разности - соответственно на вычитающий вход "-1". Поскольку первый реверсивный счетчик 7 подсчитывает (интегрирует) импульсы разностной частоты, которая обусловлена отставанием частоты, поступающей на вычитающий вход сумматора 5 частоты из-за постоянной времени цифрового интегратора, то в первом реверсивном счетчике 7 находится интеграл разности, который в статическом режиме, т.е. если не разгон и не замедление, равен входной суммарной частоте, а в динамическом режиме отличается на величину динамической ошибки, равной разности на выходе сумматора...
Генератор импульсов

Номер патента: 1406735
Опубликовано: 30.06.1988
Авторы: Нерубацкий, Созин
МПК: H03K 3/64
...частоты, поступающие н а вычитающие входы сче тчиков 9 и 2 1, вычитают и з их содержимого по единице . Когда содержимоевторого счетчика 2 1 с нет равным единице , т . е . на е го вычитающий входпоступит М импульсов эталонной частотын а выходах всех разрядов вт орого счетчика 2 1 установятся высокиепотенциалы , шестой элеме нт И 2 О откроется . М-й импульс проходит черезшестой элемент И 2 О и поступает н авторой вход шестого триггера 2 5 , пере в одя е г о в состояние " 0 " , формируятем самым задний фронт выходногоимпульса . Низкий потенциал с выходашестого триггера 2 5 перекрывает с едьмой элемент И 2 4 , запрещая т ем самымпрохождение импульсов эталонной ча стотъ на вычи т ающий вход второгосчетчика 2 1 . Одновременно М-й...
Микропрограммный процессор
Номер патента: 1553984
Опубликовано: 30.03.1990
Авторы: Дрель, Мугинштейн, Шварц
МПК: G06F 11/26, G06F 15/00
Метки: микропрограммный, процессор
...42 сдвига с выхода блока 7 и их хранение до следующего приема. С момента приема запросана выходе блока 15 приоритета находится зашифрованный код запроса. Подуправлением сигнала с выхода элемента И 43 блок 15 приоритета выдает навыход сигнал, определяющий момент.начала обработки запроса.Микропрограмма выполнения любойкоманды предполагает в последней ми: микрокоманце анализ запросов, и вслучае их,"наличия производится ветвление микропрограммы по коду зап" роса с выхода блока приоритета с переходом в начало микропрограммы обработки соответствующего запроса, приэтом следующая команда невыполняется, а ее адрес хранится в одном из регистров операционного блока 1Поокончании обработки запроса ввода(вывода) или группы запросов производится...
Предыдущий патент: Кондуктор для монтажа стенки резервуара
Следующий патент: Следящая система
Случайный патент: Способ вулканизации резиновых смесей