Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
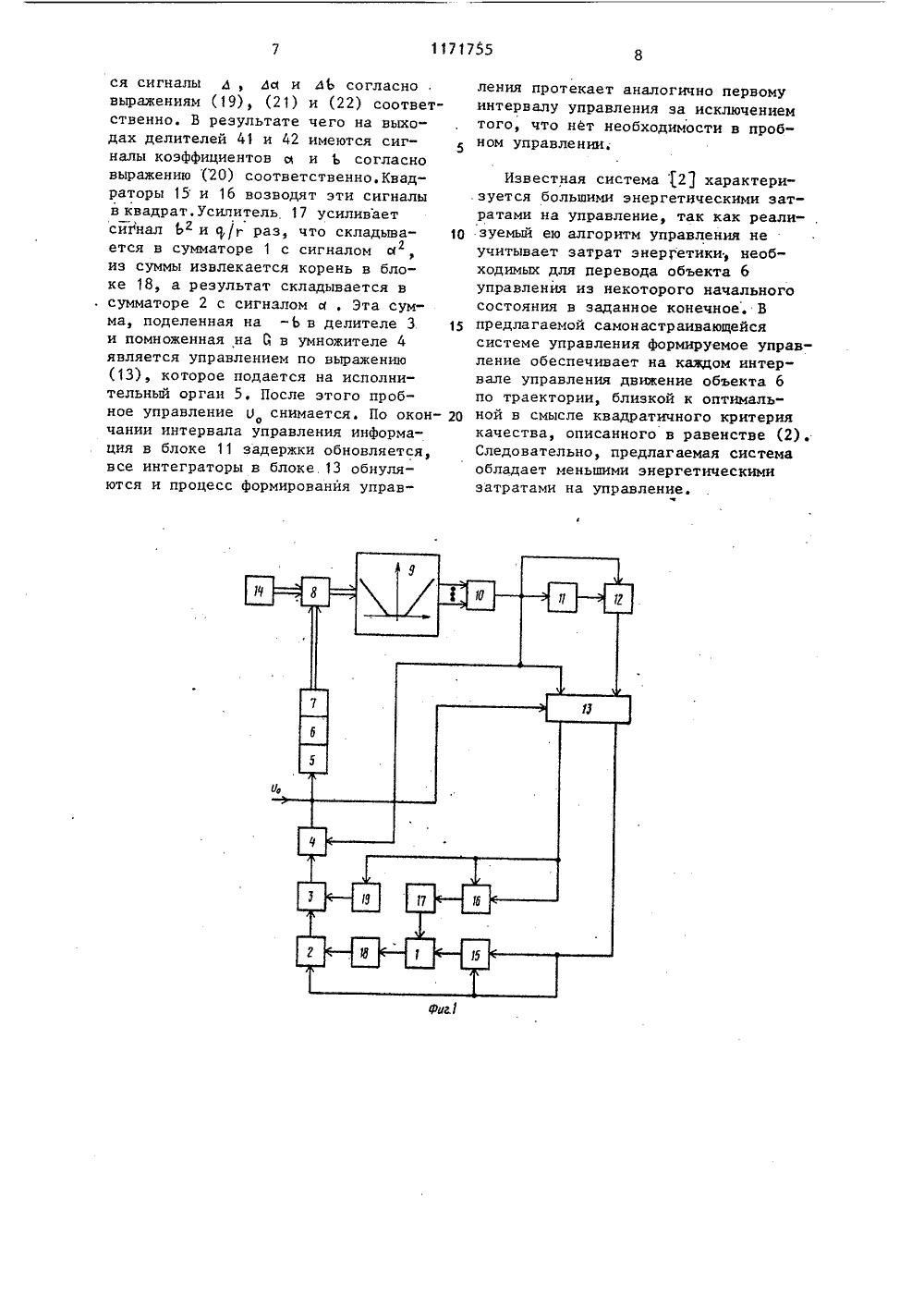
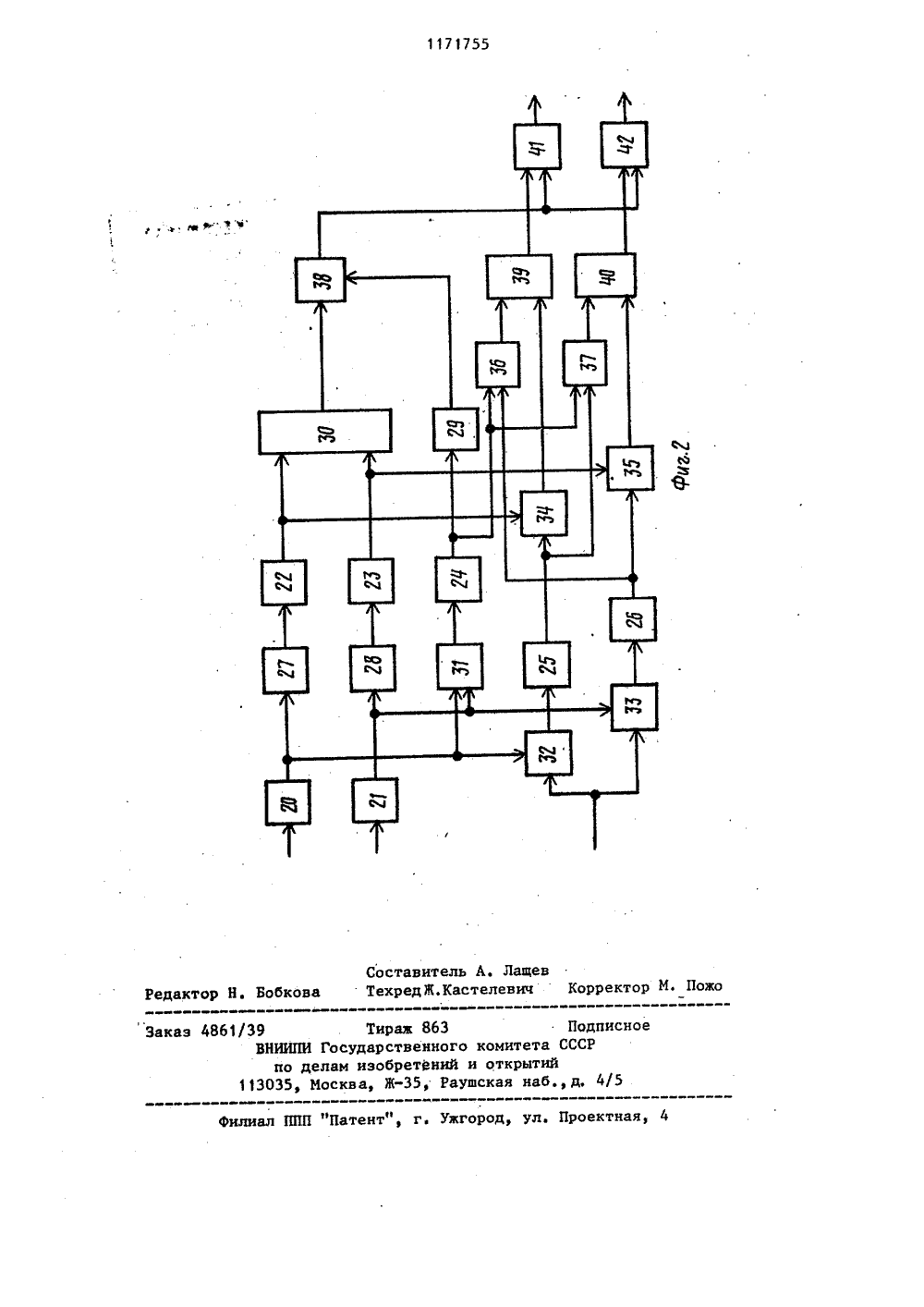
СОЮЭ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК у 1)4 С 05 В 13/02. ОПИСА БРЕТЕНИЯ ЕТЕЛЬСТВ ТОРСНОМУ(56) 1. Солодовников В.В., ШрамкоРасчет и проектирование аналитичеких самонастраивающихся систем сэталонной моделью. - М: Машиностроение, 1972, с. 210,2. Авторское свидетельство СССРио заявке В 3697672/24,кл. С 05 В 13/02, 1984.(54)(57) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМАУПРАВЛЕНИЯ, содержащая первый сумматор, второй сумматор, блок деления,блок умножения и последовательносоединенные исполнительный орган,объект управления, измерительноеустройство, первый блок сравнения,функциональный преобразователь,третий сумматор, блок задержки, второйблок сравнения и блок решения системы уравнений, второй вход первогоблока сравнения соединен с выходомзадатчика, выход третьего сумматорасоединен с вторым входом второго Л,СсГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ 901171755 блока сравнения, о т л и ч а ю -щ а я с я тем, что, с целью уменьшения энергетических затрат науправление, система содержит первый .квадратор, второй квадратор, усили"тель, блок определения квадратногокорня и инвертор, первый выход блока решения системы уравнений подключен к первому и второму входам первого квадратора и через второй сумматор, блок деления и блок умноженияк входу исполнительного органа ивторому входу блока решения системыуравнений, второй выход которогосоединен с первым и вторым входамивторого квадратора и через инверторс вторым входом блока деления,выход первого квадратора соединенчерез первый сумматор и блок определения квадратного корня с вторымвходом второго сумматора, выход второго квадратора через усилитель соединен с вторым входом первого сумматора, выход третьего сумматора соединен с третьим входом блока ре 1 пения системы уравнений и с вторымвходом блока умножения.Изобретение относится к автоматическому управлению и регулированию и, преимущественно, может быть использовано для стабилизации и последовательного управления конечным 5 состоянием широкого класса объектов с переменйыми параметрами и неконтролируемыми Возмущениями.Цель изобретения - уменьшение энергетических зато 1 на управление.На фиг. 1 представлена структурная схема,предлагаемой системы; на фиг. 2 в .внутренняя структура блока решения системы уравнений.Самонастраивающаясясистема 15 , управления содержит. (Фиг. 1) первый сумматор 1, последовательно соединенные второй сумматор 2, блок 3 деления, блок 4 умножения, исполнительный орган 5, объект б управления,20 измерительное устройство 7, первый блок 8 сравнения, функциональный преобразователь 9, третий сумматор 10, блок 11 задержки, второй блок 12 сравнения и блок 13 решения системы 25 уравнений, задатчик 14, выход которого связан с вторым входом первого блока 8 сравнения, первый квадратор 15, выход которого соединен с первым входом первого сумматора 1, второй 30 квадратор 16, выход которого через усилитель 17 соединен с вторым входом первого сумматора 1, блок 18 определения квадратного корня, вход которого соединен с выходом первого сумматора 1, а выход - с вторым входом второго сумматора 2, и инвертор 19, выход которого соединен с вторым входом блока 3 деления. Первый выход блока 13 решения системы уравнений соединен с первым и вторым входами первого квадратора 15 и с первым входом второго сумматора 2; а второй его выход соединен с первым и вторым входами второго квадратора 16 и вхо" 45 дом инвертора 19, выход блока 4 умно" жения связан с вторым входом блока 13 решения системы уравнений, выход третьего сумматора 10 связан с вторы. ми входами второго блока 12 сравне" 5 О ния и блока 4 умножения и с третьим входом блока 13 решения системы уравнений.Последний может быть выполнен по любой известной схеме. Например, 55 блок 13 (фиг. 2) состоит из семи интеграторов 20-26, трех блоков 27-29 степени, восьми умножителей 30-37,трех блоков 38-40 сравнения и .двух делителей .41 и 42. Входы интеграторов 20 и 21 являются соответственно третьим и вторым входами блока 13, входы умножителей 32 и 33 собраны в одну точку и являются первым входом блока 13. Выходы делителей 41 и 42 являются соответственно первым и вторым выходами блока 13. Интегратор 20, блок 27 степени и интегратор 22 соединены последовательно и подключены к первому входу умножителя 30,.Интегратор 21, блок 28 степени и интегратор 23 соединены последовательно и подключены к второму входу умножителя 30, выход которого подключен к первому входу 28 сравнения, Выходы интеграторов 20 и 21 подключены к входам умножителей 31 и соответственно вторым входам умножителей32 и 33. Выход умножителя 31 черезинтегратор 24 и блок 29 степениподключен к второму входу блока 38 сравнения, выход которого подключен к первым входам делителей 41 и 42. Выходы умножителей 32 и 33 через интеграторы 25 и 26, умножители 34 и 35 подсоединены к первым входам блоков 39 и 40 сравнения соответственно. Выход интегратора 24 подключен к первымвходам умножителей 36 и 37, к вторым входам которых подключены выходы интеграторов 26 и 25 соответственно. Выходы интеграторов 22 и 23 подключены к вторым входамумножителей 24 и 25 соответственно, Выходы умножителей 36 и 37 подключены к вторым входам блоков 39 и 40 сравнения соответственно, выходы которых подключены к вторым входам соответственно делителей 41 и 42,Работа предлагаемой системы поясняется с помощью теоретических выкладок.Пусть объект управления описывается векторным дифференциальным уравнением видах= (х, О, 1 ), х (1,)= х (1)гдеХ - и -мерный вектор фазовыхкоординат;0 " скалярное управление;время.Пусть вид зависимости (1) неизвестен, Необходимо найти такое управление О ( ), фо,Я, которое переводися сигналы д, аа и йЬ согласно выражениям (19), (21) и (22) соответственно. В результате чего на выходах делителей 41 и 42 имеются сиг 5 налы коэффициентов м и Ь согласно выражению (20) соответственно.Квадраторы 15 и 16 возводят эти сигналы в квадрат, Усилитель 17 усиливает сйгнал Ь и /г раз, что складыва- О ется в сумматоре 1 с сигналом ю, из суммы извлекается корень в блоке 18, а результат складывается в сумматоре 2 с сигналом ю . Эта сумма, поделенная на -Ь в делителе 3 15 и помноженная на 3 в умножителе 4 является управлением по выражению (13), которое подается на исполнительный орган 5. После этого пробное управление О снимается, По оконочании интервала управления информация в блоке 11 задержки обновляется, все интеграторы в блоке. 13 обнуляются и процесс формирования управления протекает аналогично первомуинтервалу управления за исключениемтого, что нет необходимости в пробном управлении. Известная система 2 характеризуется большими энергетическими затратами на управление, так как реализуемый ею алгоритм управления не учитывает затрат энергетики; необходимых для перевода объекта 6 управления из некоторого начального состояния в заданное конечное, В предлагаемой самонастраивающейся системе управления формируемое управление обеспечивает на каждом интервале управления движение объекта 6 по траектории, близкой к оптимальной в смысле квадратичного критерия качества, описанного в равенстве (2) . Следовательно, предлагаемая система обладает меньшими энергетическими затратами на управление.1171755 оставитель А. ЛащевехредЖ.Кастелевич Корректор М. Пож актор Н. Бобко Заказ 486 Патент", г. Ужгород, ул. Проектная 39 Тираж 863 ВНИИПИ Государственного комиао делам изобретений и отк 13035, Москва, Ж, Раушская Подписноеета СССРытийнаб., д. 4/5
СмотретьЗаявка
3703708, 23.02.1984
МАЙБОРОДА ЛЕОНИД АЛЕКСАНДРОВИЧ, ЕФИМОВ ВЛАДИМИР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 07.08.1985
Код ссылки
<a href="https://patents.su/6-1171755-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Система оптимального управленияобектами второго порядка

Номер патента: 798704
Опубликовано: 23.01.1981
Автор: Синеглазов
МПК: G05B 13/02
Метки: второго, оптимального, порядка, управленияобектами
...линиипереключения.Поскольку кусочно-нелинейная аппроксимация Функции переключения сопряжена со значительными погрешностями,то для реализации закона управленияможет быть использована модель, многократно и в "быстром" времени реализу"ющая уравнения движения объекта, Приэтом управляющее воздействие, подавае,мое на объект, выбирается, исходя изсвойств траектории модели в окрестности нуляО, -51 дп Оп 51 цп Х 519 п пх (1где х - текущее значение кос.динаты объекта х(Ъ)х,О" - значение координаты моделих(9) и ее управляющего воздействия в момент х(М)О, в случае, когда последняя перемена знакауправляющего воздействия, подаваемогона модель произошла в интервале ЖО с 1 х, (М)с 2,Управляющее воздействие, подаваемое на модель, работающее в...
Система оптимального управленияобектами второго порядка

Номер патента: 813359
Опубликовано: 15.03.1981
Авторы: Игнатенко, Синеглазов
МПК: G05B 13/04
Метки: второго, оптимального, порядка, управленияобектами
...движение системы происходит понулевой траектории в заданное конечное состояние. Для исключения необходимости использования блока постоянного или регулируемого запаздывания,нносящего дополнительную погрешность,в решении целесообразно воспроизводить линию переключения в преобразованных координатах Х,Х и Х ,Хпри этом обе линии переключейия впреобразованных координатах оказываются подобны друг другу, отличаясь.лишь коэффициентом К значение которого постоянно, то оказывается возможным для построения указанных линий в преобразованных координатахиспользовать убыстренную модель объекта.устройство работает следующим об" разом,Блок 14 установки начальных условий при отклонении значений координаты объекта Х от нулевых произнения динамики...
Устройство для контроля блоков памяти

Номер патента: 1049980
Опубликовано: 23.10.1983
Автор: Савельев
МПК: G11C 29/00
...которых подключены к входам формирователей уп-.равляющих сигналов перной группы,выходы которых соединены с первымивходами элементов И первой группы,вторые входы которых подключены к вы"ходам счетчика импульсов, а выходы "к нходам первого элемента ИЛИ, выход.которого соединен с нходом первогоформирователя стробирующих скгналон,выход которого подключен к первымвходам усилителей считывания, причемвыходы регистра числа соединены с одними из входов блока сравнения, другие входы которого подключены к од"ним из выходов накопителя, другиевходы и выходы которого являютсяконтрольными входами и выходами устройства, управляющим выходом и инфор-.мационными входами устройства явля"ются четвертый выход блока управления .и вторые входы усилителей...
Устройство для управления блоком памяти

Номер патента: 1164718
Опубликовано: 30.06.1985
Авторы: Волоско, Лысков, Рахов, Савченко
МПК: G06F 12/00, G11C 7/08
...29подключены к входу 19 и выходу 22распределителя 4, а его входы 18и 9 соединены соответственно с выходами 21 и 20. Временная диаграмма сигналов на входах 18 и 19 и выходе 22 распределителя 4 приведенана фиг. 2 б,На фиг. 3 дан пример выполнениякоммутатора 5 режима, содержащегоэлементы И 30-37 и элементы ИЛИ 38и 39.Устройство обеспечивает работув режимах "Запись", "Считывание","Выборка", "Контроль информации"и работает следующим образом.В режиме "Затясь" из контроллера АИС (не показан) по линии 3на вход коммутатора 5 поступаетсигнал, соответствующий режиму"Запись"При этом на выходах 5и 17, коммутатора 5 появляются управляющие потенциалы, которые поступают на вход ключа 27 и черезэлемент 10 - на вход счетчика 7,подготавливая их к...
Система для обмена информацией

Номер патента: 980087
Опубликовано: 07.12.1982
Авторы: Вертлиб, Герасимов, Григорьева, Жожикашвили, Жуков, Мастрюков, Пшеничников, Русецкий, Стернин, Шнейдер
МПК: G06F 3/04
Метки: информацией, обмена
...,з группой управляющих выходов блока уп.- равления передачей, вторая и третья группы управляющих выходов которого подключены к соответствующим управляю- щим входам регистра передачи и блока шифрации служебных кодов, адресный вход которого и адресный вход блока коммутации сигналов управления передачей соединены с адресным выходом блока опроса готовностей, управляющие входы и вьЬод которого соединены соответственно с выходом блокировки и входом приоритета .блока управления передачей, а группа линейных входов и выходов соединена с 20 группой абонентских выходов и входов блока управления передачей, входы и выходы управления приемом и входы и выходы управления передачей первой и второй группблока сопряжения с каналом подключены...
Предыдущий патент: Система управления с переменной структурой
Следующий патент: Цифровой указатель экстремумов
Случайный патент: Устройство для регулирования и обеспечения параллельной работы паросиловой установки с отдачей пара пониженного давления на общий паропровод