Система автоматического управления судном
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 948772
Автор: Завирухо

Текст
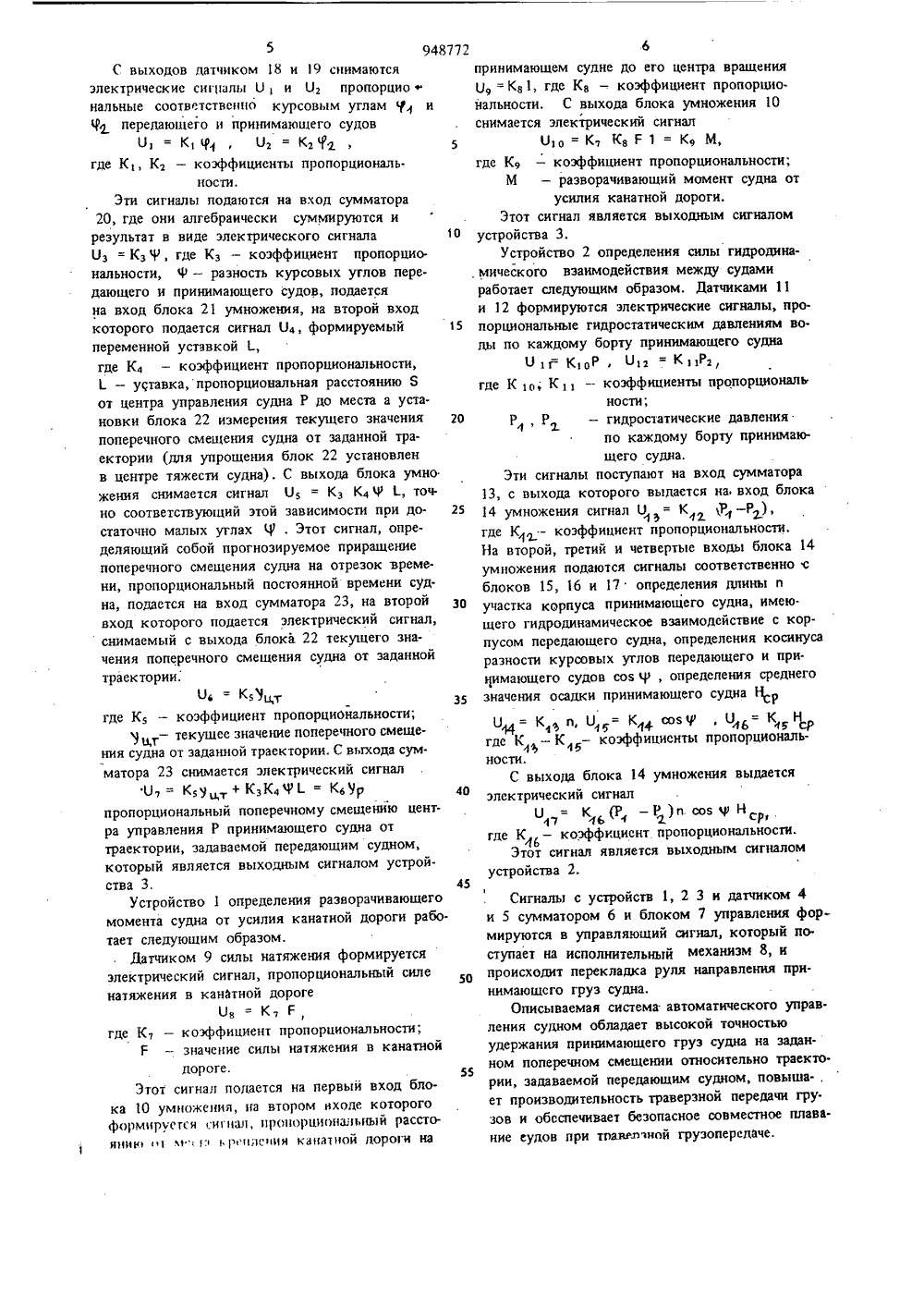
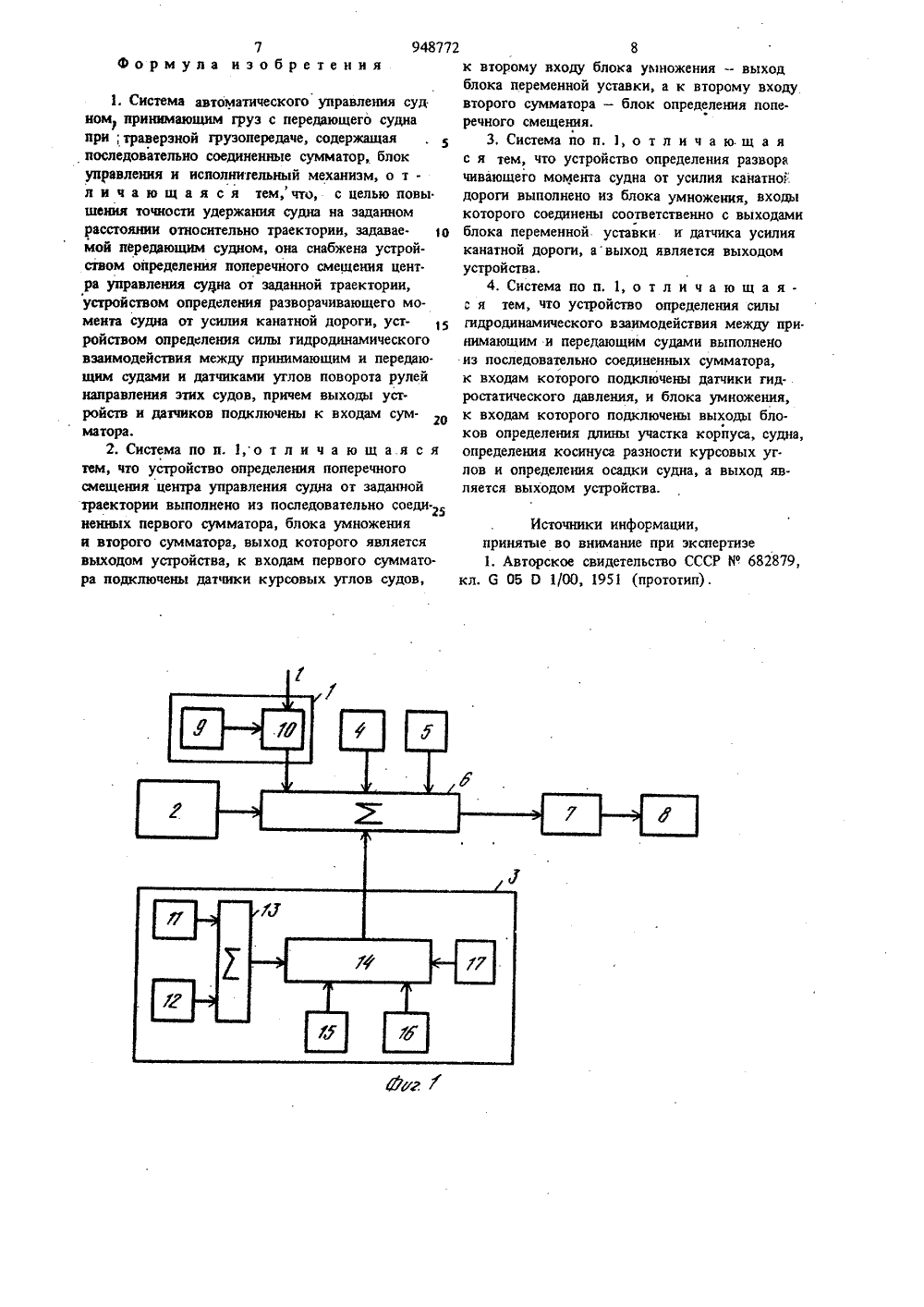
(51)М Кл В 63 Н 25/04 с присоединением заявкиГееударстееккый комнтет СССР(28) П риоритет Опубликовано 07,08,82 Бюллетень29 по делам изобретений н открытейДата опубликования описания 07,08.82(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ Изобретение относится к судостроению, Известна система автоматического управления судном, принимающим груз с передающего судна при траверзной грузопередаче, содержащая последовательно соединенные сумматор, блок5 управления,и исполнительный механизм 11,Недостатком такой системы является недос. таточная точность отслеживания судном заданной траектории. 1 ОЦель изобретения - повышение точности удержания судна на заданном расстоянии относительно траектории, задаваемой передающим судном.Для этого система снабжена устройством оп 5 ределения поперечного смещения центра управ. пения судна от заданной траектории, устройствсюм определения разворачивающего момента судна от усилия канатной дороги, устройством.опре. деления силы гидродинамического взаимодейст- то вия между принимающим и передающим суда. ми и датчиками утлов поворота рулей направления этих судов, причем выходы устройств и датчиков подключены к входам сумматора; Устройство определения поперечного смещения центра управления судна от заданной тра. ектории выполнено из последовательно соединенных первого сумматора, блока умножения и второго сумматора, выход которого является выходом устройства, к входам первого сумматора подключены датчики курсовых ут. лов судов, к второму входу блока умножения- выход блока переменной уставки, а к второму входу второго сумматора - блок определения поперечного смещения,Устройство определения разворачивающего момента судна от усилия канатной дороги выполнено из блока умножения, входы которого соединены соответственно с выходами блока переменной уставки и датчика усилия канатной дороги, а выход является выходом устройства.Устройство определения силы гидродинамического взаимодействия между принимающим и передающим судами выполнено из последовательно соединенных сумматора-к входам которого подключены датчики гидростатического давления, и блока умножения, к входам которого подключены выходы блоков опреде.3 948772пения длины участка корпуса судна, определения косинуса разности курсовых утлов и определения осадки судна, а выход является выходом устройства.На фиг. 1 изображена блок - схема системы автоматического управления судном, принимаю- щим груз с передающего судна при траверзной грузопередаче; на фиг. 2 - блок-схема уст. ройства определения поперечного смещения центра управления судна; на фиг. 3 - схема сов местного движения судов при траверзной гру. эопередаче.Система содержит устройство 1 определения г.разворачивающего момента судна от усилия канатной дороги, устройство 2 определения силы 1 гидродинамического взаимодействия между судами, устройство 3 определения поперечного смещения центра управления судна от заданной траектории, датчики 4 и 5 углов поворота рулей направления передающего и принимающе- ого судов, подключенные своими выходами к входам сумматора б, выход которого соединен с входом блока 7 управления, подключенного выходом к входу исполнительного механизма 8,Устройство 1 определения разворачивающегомомента судна от усилия канатной дороги состоит из датчика 9 усилия канатной дороги, подключенного электрически к блоку 10 умно жения с переменной уставкой 1 на втором входе, пропорциональной расстоянию от местакрепления канатной дороги на принимающем судне до. центра его вращения. Выход блока 10 умножения является выходом устройства,Устройство 2 определения силы гидродинамического взаимодействия между судами состоит из датчиков 11 и 12 гидростатического давления, установленных по каждому борту принимающего груз судна, причем датчик 12 установлен на расстоянии не менее двух мет.ров от борта, обращенного в сторону передаю.щего судна, с целью исключения влияния пограничного слоя воды, обтекающего корпус судна,на замер гидростатического давления в межкорпусном пространстве, Выходы датчиков 11 и12 подключены к входам сумматора 13, выходкоторого подключен к входу блока 14 умножения, к другим входам которого подключенывыходами блоки 15 - 17 определения длины участка корпуса судна, имеющего гидродинамическое взаимодействие с корпусом передающего5 Осудна, определения косинуса разности курсовыхуглов передающего и принимающего судов, опэеделение значения осадки принимающего судна.Выход блока 14 умножения является выходомустройства,Устройство 3 определения поперечного сме.55щения центрауправления судна от заданнойтраектории (см. фиг. 2) содержит датчики 18 и9 курсовых углов соответственно передающего и принимающего судов, подключенных выходами к первому сумматору 20, выход которо.го подключен к входу блока 21 умножения,с переменной уставкой 1. на втором входе, пропорциональной.расстоянию 8 от места установкиблока 22 измерения текущего значения поперечного смещения судна от заданной траекториидо центра управления - условной точки, вынесенной на некоторое расстояние, пропорциональное постоянной времени судна, вперед ло курсусудна от точки установки блока текущего значения поперечного смещения судна от заданнойтраектории. Выход блока умножения подключенк одному из входов второго сумматора 23, квторому входу которого подключен выходомблок 22 текущего значения поперечного сме.щения судна от заданной траектории. Выходсумматора 23 является выходом устройства,Система работает следующим образом.Работа поясняется упрощенной схемой совместного движения судов при траверзнойгрузопередаче фиг. 3), где поз. 24, 25 -соответственно передающее и принимающеесуда, поз, 26 - траектория, задаваемая разгружаемым судном, поз. 27 - руль направления,принимающего судна, поз, 28 - канатная дорога,Устройство 3 определения поперечного смещения центра управления принимающего суднаот заданной траектории выдает со своего выхода электрический сигнал, пропорциональныйпо своему значению поперечному смещению 1центра управления Р от траектории 24, задаваемой судном 25, Этот сигнал поступает напервый вход сумматора б, на второй входкоторого подается электрический сигнал с вы.хода устройства 1, пропорциональный по своему значению разворачивающему моменту суднаот усилия канатной дороги 2 б. На третий вход сумматора б подается с выхода устройства 2 электрический сигнал, пропорциональный силе гидродинамического взаимо действия между судами, На четвертый и пятый входы подаются электрические сигналы с датчиков 4 и 5, пропорциональные углам поворота рулей направления соответственно передающего и принимающего судов, Сумматор б формирует электрический сигнал, пропорциональный алгебраической сумме указанных сигналов, который подается на вход блока 7, где усиливается по напряжению и по мощности и отрабатывается исполниельным механизмом 8, которыи и обе. спещшает перекладку руля 27 направления судна 28 в соответствии с сигналом управления,Устройство определения поперечного смещения центра управления принимающего судна от заданной траектории работает следующим образом.948772 5 40 С выходов датчиком 18 и 19 снимаютсяэлектрические сигналы О, и О, пропорцио фнальные соответственно курсовым углам 4 иЧ 2 передающего и принимающего судовО КЧ 402 К 2 1 Т5где К К 2 - коэффициенты пропорциональности.Эти сигналы подаются на вход сумматора20, где они алгебраически суммируются ирезультат в виде электрического сигнала 0Оэ = Кэ Ч, где К, - коэффициент пропорциональности, Ч - разность курсовых углов передающего и принимающего судов, подаетсяна вход блока 21 умножении, на второй входкоторого подается сигнал 04, формируемыйпеременной уставкой 1,где К 4 - коэффициент пропорциональности,1. - УЧтавка,пропорциональная расстоянию Яот центра управления судна Р до места а установки блока 22 измерения текущего значения 20поперечного смещения судна от заданной траектории (для упрощения блок 22 установленв центре тяжести судна). С выхода блока умножения снимается сигнал Оь - Кз К 4 Ч , точ.но соответствующий этой зависимости при достаточно малых углах Ю . Этот сигнал, определяющий собой прогнозируемое приращениепоперечного смещения сулиа на отрезок времени, пропорциональный постоянной времени судна, подается на вход сумматора 23, на второйвход которого подается электрический сигнал,снимаемый с выхода блока 22 текущего значения поперечного смешения судна от заданнойтраектории.04 - К 5 Уц,т35где К, - коэффициент пропорциональности;У - текущее значение поперечного смещеУцгния судна от заданной траектории. С выхода сумматора 23 снимается электрический сигналК 5 У О,т + Кз К 41- = Кб Чрпропорциональный поперечному смещению центра управления Р принимающего судна оттраектории, задаваемой передающим судном,который является выходным сигналом устрой.ства 3, 45Устройство 1 определения разворачивающегомомента судна от усилия канатной дороги работает следующим образом.Датчиком 9 силы натяжения формируетсяэлектрический сигнал, пропорциональный силенатяжения в канатной дороге08 К 7где К, - коэффициент пропорциональности;Е - значение силы натяжения в канатной дороге.55Этот сигнал подается на первый вход блока 10 умножения, иа втором входе которого формирускн сигнал, ироиорционал ный расстояниюм" :Рчсиня канатой дороги на принимающем судне до его центра вращения09 = К 81, где Кв - . коэффициент пропорциональности, С выхода блока умножения 10снимается электрический сигналОо - К 2 Кв Р 1 = К, М,где К 9 - коэффициент пропорциональности;М - разворачивающий момент судна отусилия канатной дороги,Этот сигнал является выходным сигналомустройства 3,Устройство 2 определения силы гидролинамического взаимодействия между судамиработает следующим образом. Датчиками 11и 12 формируются электрические сигналы, про.порциональные гидростатическим давлениям во.ды по каждому борту принимающего судна0 г КоР, О 2 = КР 2,где К о, К - коэффициенты пропорциональности;Р 4, Р - гидростатические давленияпо каждому борту принимающего судна.Эти сигналы поступают на вход сумматора13, с выхода которого выдается на вход блока14 умножения сигнал О = К 4 з Р - Р)где К 4 - коэффициент пропорциональности.На второй, третий и четвертые входы блока 14умножения подаются сигналы соответственно сблоков 15, 16 и 17 определения длины иучастка корпуса принимающего судна, имею.щего гидродинамическое взаимодействие с корпусом передающего судна, определения косинусаразности курсовых углов передающего и при.1 имающего судов соа Р , определения среднегозначения осадки принимающего судна Н Р044= Кь и, О = К+4 соя 9, 046= К,где К - К - коэффициенты пропорциональ 44)ности.С выхода блока 14 умножения выдаетсяэлектрический сигналО = К 0-Р)п созе Н,гле К - коэффициент пропорциональйости.16Этот сигнал является выходным сигналомустройства 2,Сигналы с устройств 1, 2 3 и датчиком 4и 5 сумматором 6 и блоком 7 управления формируются в управляющий сигнал, который по.ступает на исполнительный механизм 8, ипроисходит перекладка руля направления принимаюшсго груз судна,Описываемая система автоматического управ.ления сулном обладает высокой точностьюудержания принимающего груз судна на заданном поперечном смещении относительно траектории, задаваемой передающим судном, повыша.,ет производительность траверзной передачи гру.зов и обеспечивает безопасное совместное плавание судов при тпавелюой грузоперелаче.1. Система автоматического управления судном принимающим груз с передающего судна)нри; траверзной грузопередаче, содержащаяпоследовательно соединенные сумматор, блокуправления и исполнительный механизм, о т .личающаяся тем,что, сцельюповыщения точности удержания судна на заданномрасстоянии относительно траектории, задавае. 1 омой передающим судном, она снабжена устройством определения поперечного смещения центра управления судна от заданной траектории,устройством определения разворачивающего момента судна от усилия канатной дороги, устройством определения силы гидродинамическоговзаимодействия между принимающим и передающим судами и датчиками углов поворота рулейнаправления этих судов, причем выходы устройств и датчиков подключены к входам сумматора,2. Система по п. 1,о т л и ч а ю щ а я с ятем, что устройство определения поперечногосмещения центра управления судна от заданнойтраектории выполнено из последовательно соедн.пенных первого сумматора, блока умноженияи второго сумматора, выход которого являетсявыходом устройства, к входам первого сумматора подключены датчики курсовых углов судов,8к второму входу блока умножения - выходблока переменной уставки, а к второму входувторого сумматора - блок определения поперечного смещения.3. Система по и. 1, о т л и ч а ю щ а яс я тем, что устройство определения разворачивающего момента судна от усилия канатноГдороги выполнено из блока умножения, входыкоторого соединены соответственно с выходамнблока переменной уставки и датчика усилияканатной дороги, авыход является выходомустройства,4. Система по п. 1, о т л и ч а ю щ а яс я тем, что устройство определения силыгидродинамического взаимодействия между при.нимающим и передающим судами выполненоиз последовательно соединенных сумматора,к входам которого подключены датчики гид-.ростатического давления, и блока умножения,к входам которого подключены выходы блоков определения длины участка корпуса, судна,определения косинуса разности курсовых уг.лов и определения осадки судна, а выход является выходом устройства. Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство СССР Иф 682879,кл. 6 ОБ О 1/00, 1951 (прототип).948772 Составитель С, Техред М,Тепер арфина ктор С,ектор М Шарощн ито одписное Заказ 6088/21, ул. Проектная, 4 ал Тираж 462 ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 13035, Москва, Ж.35, Раушская наб., д. 4/
СмотретьЗаявка
2988808, 03.10.1980
ПРЕДПРИЯТИЕ ПЯ А-1097
ЗАВИРУХО ВИТАЛИЙ ДМИТРИЕВИЧ
МПК / Метки
МПК: B63H 25/04
Метки: судном
Опубликовано: 07.08.1982
Код ссылки
<a href="https://patents.su/5-948772-sistema-avtomaticheskogo-upravleniya-sudnom.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматического управления судном</a>
Устройство для умножения аналогового сигнала на косинус угла поворота

Номер патента: 732901
Опубликовано: 05.05.1980
Автор: Медяков
МПК: G06G 7/16
Метки: аналогового, косинус, поворота, сигнала, угла, умножения
...напряжение О, действующее на входе 10 устройства, при повороте входной оси 1 устройства на угол преобразуется в напряжениеО, на выходе 12 устройства в соответствии с зависимостьюЯ о о а где 2 с, - полный угол поворота движкапотенциометра 2;Й - суммарное сопротивление потенциометра 2 и добавочных резисторов 3 и 4;Бй- сопротивление потенциометра 2;. - текущий угол поворота движкапотенциометра 2, отсчитываемыйот средней точки сопротивленияЙ 4Причем абсолютная (методическая) ошибка воспроизведения устройством косинусной зависимости (1) не превышает величины 0,001.3 при условии что коэффициент деления, установленный на делителе 7, равен одной четверти, а сощротивле ние масштабирующего резистора 5 составляет пять двенадцатых величины...
Устройство противоизгиба валков

Номер патента: 1202655
Опубликовано: 07.01.1986
Авторы: Василевич, Елишевич, Засельский, Морозов, Паргамонов, Яланский
МПК: B21B 37/30
Метки: валков, противоизгиба
...динамического падения давления противоизгиба при захвате полосы валками,С выхода первого блока 17 памятипо команде от датчика 12 на вход первого блока 15 умножения поступаетсигнал заданного переднего натяженияполосы в промежутке между регулирующей и последующей клетями. В блоке15 сигнал переднего натяжения умножается на коэффициент, соответствующий нрофилеразмеру прокатываемойполосы, Значения коэффициентов дляразличных профилеразмеров полос определяются экспериментальным или расчетным путем до прокатки, Результирующий сигнал с выхода блока 15 поступает на второй вход сумматора 14, где складывается с сигналом, поступившим на его первый вход с выхода блока 11 коррекции. Суммарный сигнал с выхода сумматора 14 поступает навторой вход...
Устройство для распознавания прямого края объекта

Номер патента: 1179391
Опубликовано: 15.09.1985
Авторы: Павликов, Сергеев, Харлапенко
МПК: G06K 9/00
Метки: края, объекта, прямого, распознавания
...25 счетчика 44 тактовых импульсов и на входыстробирования логического элемента И 3 и сумматора 4. При этом сигналы с выхода аналого-цифрового преобразователя 2 через элемент И 3 30 проодят на вход сумматора 4, При равенстве кода сигнала с выхода второго счетчика 44 тактовых импульсов с кодом .сигнала на выходе регистра 50 в четвертой схеме 45 сравнения вырабатывается сигнал, который указывает на конец фрагмента по горизонтали. Таким образом, в этот момент времени, соответственно, для Х = 1 в первом сумматоре 4 будет находить О ся накопленный сигнал У, для Х "2 - сигнал У и т,д., который за"тем сбрасывается сигналом с выхода второго элемента ИЛИ 47 (этот сигнал образуется по сигналу с выхода 45 четвертой схемы 45 сравнения,...
Привод относительного поворота звеньев манипулятора

Номер патента: 1229033
Опубликовано: 07.05.1986
Авторы: Запорожец, Кондратенко, Филаретов
МПК: B25J 9/18
Метки: звеньев, манипулятора, относительного, поворота, привод
...и 19 умножения;сигнал, соответствующий угловой частот сд гармонических функций и пропорциональный требуемой угловой ско;. ;росси вращения оси 2 (т.е вращаемого звена руки робота), подается свторого выходя блока 10 на первыйвход блока 17 умножения, я сигнал,соответствующий требуемому угловому 1 сч пеРемещеттиттэ С вРащаемого звена, спервого выхода блока 10 поступаетна ог.,ин из входов блока 12. На второй ттход блока 12 сравнения, как ипя первый вход блока 20 памяти, по -ступает сигнал с выхода датчика 11положения оси, Таким образом, в блоке 20 памяти всегда хранится инфортяция о текущем угловом положении сттоси , а на вьгходе блока 12 сравнеАрнин формируется сигнал рассогласования лс == С 1 т,д- ср, который одновременно подается на вход...
Устройство для управления многокомпонентным дозированием

Номер патента: 1381444
Опубликовано: 15.03.1988
Авторы: Барский, Воробьев, Заец, Силаев, Скрипка
МПК: G05D 11/13
Метки: дозированием, многокомпонентным
...+ Ю Таким образом корректируется значение заданной результирующей массы смеси Ч с учетом превышеония абсолютной погрешности доэирования первого компонента допустимых значений. Скорректированная результирующая масса смеси Аг поступает на вход первого бпока 1 г умножения второго канала, в котором определяется уставка дозатора второго компонента5 (г = , Аг, Далее определяется превышение абсолютной нормированной погрешности дозирования второго компонента допустимых значений , = 1 Чг 1 -6 г 1. Если величины с, и Р не равны нулю, они поступают на входы третьих блоков 7 и 7 умножения соответ 1ствующих каналов, в которых умножаются на коэффициенты у,исоответственно. После этого сигналы ), д, и 15 у дг поступают на соответствующие входы первого...
Предыдущий патент: Движительно-рулевая колонка судна
Следующий патент: Гидравлическая рулевая машина
Случайный патент: Ручной инструмент для резки проволоки