Устройство для управления адаптив-ных роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
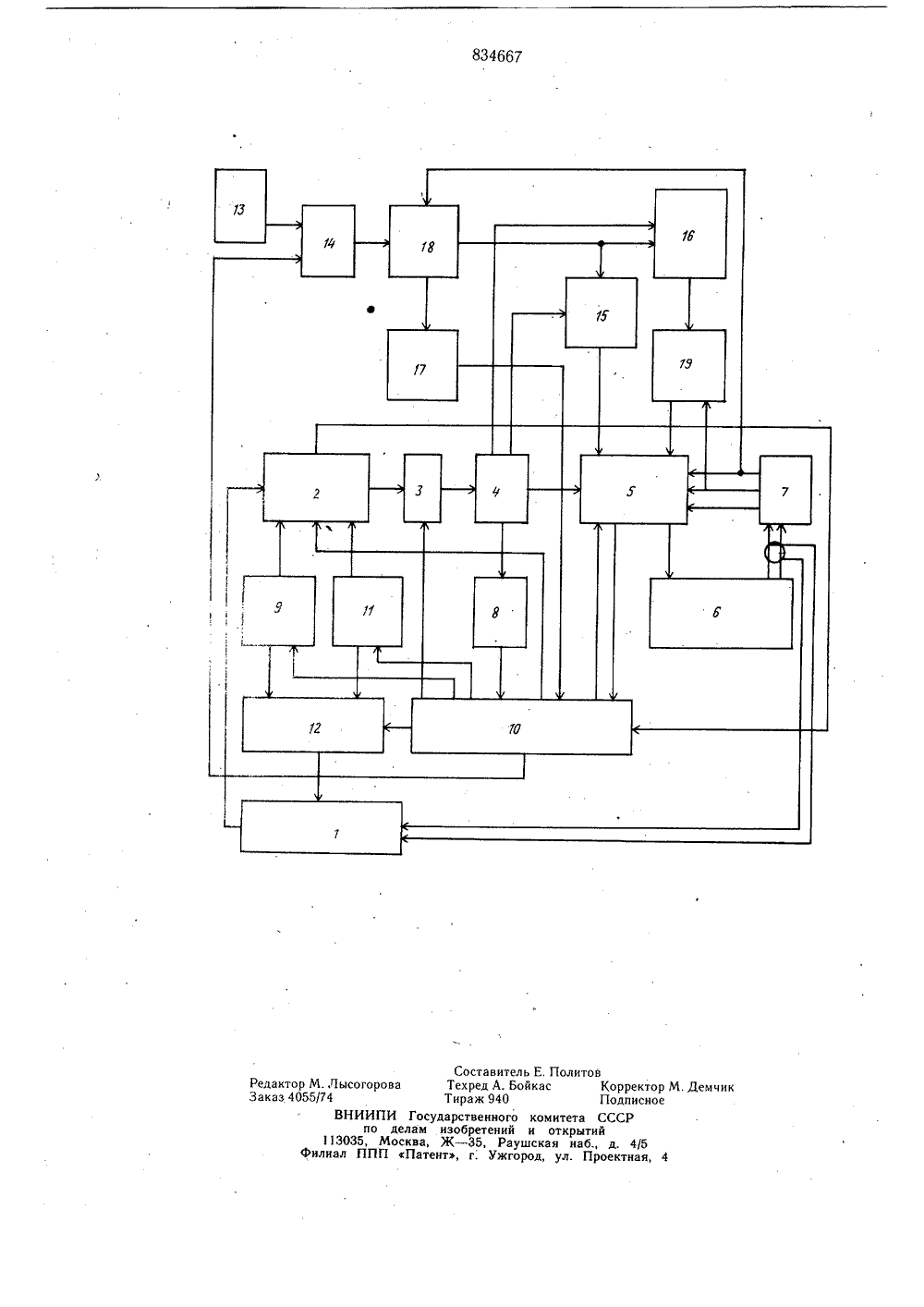
ОП ИСАНИЕ ИЗОБРЕТЕНИЯ Союз СоветскихСоциалистическихРеспублик и 834667 К АВТОРСКОМУ СВИДЕТЕПЬСТВУОпубликовано 30.05.81. Бюллетень М 20Дата опубликования описания 05,06.81 по делам изобретений и открытий(72) Авторы изобретения 1 1;1 ж.Рыбинский авиационный технологический институт:.,(71) Заявител СТРОИСТВО ДЛЯ УПРАВЛЕНИЯАДАПТИВНЫМ РОБОТОМ Изобретение относится к робототехнике и может быть использовано для управления адаптивным промышленным роботом при автоматизации производственных процессов.Известны устройства для управления адаптивным роботом, содержащие блок ввода изображения, блок определения координат центра тяжести, приводы и датчики положения, обеспечивающие обработку задаваемых перемещений только в прямоугольной системе координат 11.Наиболее близкое к предлагаемому устройство содержит последовательно соединенные блок ввода изображения, установленный на схвате исполнительного органа робота, операционный блок, коммутатор команд, блок памяти, блок формирования сигналов перемещения, приводы и блок датчиков положения, первый, второй и третий выходы которого подключены ко второму, третьему и четвертому входам блока формирования сигналов перемещения соответственно, второй выход блока памяти соединен, со входом нуль-органа, а также последовательно соединенные блок управления, блок формирования прямоугольного растра, второй выход которого соединен со вторым входом операционного блока, и коммутатор раз верток, выход которого подключен ко входу блока ввода изображения, а второй вход - к первому выходу блока кругово;: развертки, второй выход которого соедине.с третьим входом операционного блока второй выход которого подключен к первому входу блока управления, второй вход которого соединен со вторым выходом блока формирования сигналов перемещения, третий вход - с выходом нуль-органа, второй вы ход - с пятым входом блока формированиясигналов перемещения, третий выход - со вторым входом коммутатора команд, четвертый выход - с четвертым входом операционного блока, пятый выход - с входом блока круговой развертки, а шестой выход с третьим входом коммутатора разверток 2.Недостатком известного устройства являются его узкие функциональные возможности, заключающиеся в необходимости использования для захвата неориентированных деталей манипулятора, работающего только в прямоугольной системе координат. Учить вая, что подавляющее большинство манипу ляторов промышленных роботов имеет цилиндрическую систему координат, значи20 25 35 40 45 50 55 тельно ограничивается сфера применения известного устройства.Цель изобретения - расширение функциональных возможностей устройства,Указанная цель достигается тем, что устройство содержит первый двоичный умножитель, первый счетчик и последовательно соединенные генератор, элемент И, второй двоичный умножитель, третий двоичный умножитель и второй счетчик, второй вход которого подключен ко второму выходу блока датчиков положения, а выход - к шестому входу блока формирования сигналов перемещения, седьмой вход которого соединен с выходом первого двоичного умно- жителя, первый вход которого подключен к выходу второго двоичного умножителя, а второй вход - к второму выходу блока памяти, третий выход которого соединен со вторым входом третьего двоичного умножителя, первый выход блока датчиков положения подключен ко второму входу второго двоичного умножителя, второй выход которого через первый счетчик соединен с четвертым входом блока управления, шестой выход которого подключен ко второму входу элемента И.На чертеже представлена функциональная схема устройства.Устройство содержит блокввода изображения, операционный блок 2, коммутатор З.команд, блок 4 памяти, блок 5 формирования сигналов перемещения, приводы 6, блок 7 датчиков положения, нуль-орган 8, блок 9 круговой развертки, блок 10 управления, блок 1 формирования прямоугольного растра; коммутатор 12 разверток, генератор 13, элемент 14 И, первый двоичный умножитель 5, второй двоичный умножитель 16, первый счетчик 17, третий двоичный умножитель 18, второй счетчик 19.Устройство работает следующим образом. Положение детали на рабочей поверхности определяется координатами ее центра тяжести Х У и углом ориентации оси симметрии детали относительно некоторой линии отсчета. Вычисление координат положения детали на рабочей поверхности начинается с момента поступления импульса передачи управления из блока 5 формирования сигналов перемещения в блок 10 управления, При расположении блока 1 ввода изображения в схвате робота это свидетельствует о выходе схвата в центр заданной зоны обзора. Вычисление интересующих параметров осуществляется путем обработки оптической информации о положении детали в зоне обзора, формируемой блоком 1 ввода изображения. Чувствительным элементом блока 1 ввода изображения является фотоприемная матрица, на матричное фоточувствительное поле которой с помошью объектива проектируется изображение детали. С началом работы устройства блок 10 управления запускает блок 11 формирования прямоугольного растра, Выходные сигналы блока 11 поступают на вход коммутатора 12 разверток, Под действием сигнала, поступающего из блока 10 управления на вход коммутатора 12 разверток, выходные сигналы блока 11 формирования прямоугольного растра через коммутатор 12 разверток подаются на вход блока 1 ввода изображения. На выходе блока 1 ввода изображения появляется сигнал, логическое значение которого соответствует оптической информации, воздействующей на выбранный элемент информационного поля фотоприемной матрицы. На основании логических значений сигналов, поступающих с выхода блока 1 ввода изображения и с выхода блока 11 формирования прямоугольного растра, операционный блок 2 вычисляет значение координаты Хс центра тяжести, детали. После окончания вычисления координаты Х с выхода операционного блока 2 на вход блока 10 управления поступает сигнал, свидетельствуюший об этом, и блок 10 управления через коммутатор 3 команд обеспечивает запись информации о координате Х с выхода операционного блока 2 в соответствующую ячейку блока 4 памяти. После этого блок 10 управления переключает коммутатор 3 команд и коммутатор 2 разверток в ре ким определения координаты У . Вычисление и запись информации У в блок 4 памяти осуществляется аналогичйо Х .После вычисления координат Х и У, центра тяжести детали они должны быть отработаны приводами 6 исполнительного органа робота. В результате отработки этих величин схват робота должен совместиться с центром тяжести детали. Однако вычисление координат центра тяжести детали осушествляется в прямоугольной системе координат информационного поля фотоприемной матрицыа отработка этих величин должна происходить в системе координат манипулятора адаптивного робота. Плоские координаты схвата в цилиндрической системе координат определяются длиной руки и углом ее поворота, Поэтому для вывода схвата адаптивного робота над центром тяжести детали в результате отработки вычисленных значений его координат Х и Ус необходимо преобразовать их в приращения длины ЬК и угла поворота Ь 4 руки робота. Приближенные условия преобразования координат имеют вид лй = сНУсЬ ц,= С- - Хс,где С - коэффициент, учитываюший параметры оптической системы блока 1 ввода изображения;Н и К - высота расположения схвата над рабочей поверхностью и длина руки адаптивного робота соответственно, фиксируемые блоком 7 датчиков положения исполнительного органа робота при вычислении координат,ХС и У центра тяжести детали.В соответствии с этим, для преобразования вычисленных значений координат Х и Ус центра тяжести детали после записи координаты У в соответствующую ячейку блока 4 памяти блок 10 управления открывает элемент 14 И, через который импульсы от генератора 13 поступают на второй двоичный умножитель 16. Второй двоичный умно- житель 16 преобразует значение высоты, поступающее с первого выхода блока 7 датчиков положения, в поток одноразрядных приращений, поступающих на входы первого 15 и третьего 18 двоичных умножителей. На втором входе первого двоичного умно- жителя 15 образуется поток одноразрядных приращений соответствующий произведению высоты на ординату центра тяжести детали. Этот поток поступает в блок 5 формирования сигналов перемещения, в котором воспринимается как приращение длины руки адаптивного робота. Это приращение суммируется с уставкой длины руки, соответствующей центру зоны обзора. Одновременно на выходе третьего двоичного умножителя 18 образуется поток одноразрядных приращений, соответствующий произведению высоты на абсциссу центра тяжести детали. Это обеспечивается подачей вычисленной координаты Хс на второй вход третьего двоичного умножителя 18. Поток одноразрядных приращений с выхода третьего двоичного умножителя 18 поступает на вход второго счетчика 19, имеющего управляемый коэффициент деления. Изменение коэффициента деления второго счетчика 19 осуществляется кодом длины руки, поступающим со второго выхода блока 7 датчиков поло. жения на второй вход второго счетчика 19. В результате на выходе второго счетчика 19 образуется поток одноразрядных приращений, соответствующий частному от деления произведения высоты и координаты Х центра тяжести детали на величину длины руки. Этот поток поступает в блок 5 формирования сигналов перемещения, в котором воспринимается как приращение угла поворота руки адаптивного робота. Это приращение суммируется с уставкой угла поворота руки, соответствующей центру зоны обзора. Потоки одноразрядных приращений на выходах второго счетчика 19 и первого двоичного умножителя 15 будут соответствовать необходимым величинам лишь при поступлении определенного колнчества импульсов на вход второго двоичного умножителя 16. Для обеспечения этого ко второму выходу второго двоичного умножителя 16, на котором вырабатываются импульсы переполнения, подключен первый счетчик 17. На выходе первого счетчика 17 появляется сигнал после поступления на вход второго двоичного умножителя 16 необходимого количества импульсов. По этому сигналу блок 1051 О15о 2530 управления закрывает элемент 14 И и выдает в блок 5 формирования сигналов перемещения команду на отработку полученных приращений длины и угла поворота руки адаптивного робота. В процессе отработки этой информации приводами 6 исполнительного органа робота схват робота с установленным на нем блоком 1 ввода изображения перемещается в позицию, находящуюся над центром тяжести детали. В момент окончания отработки информации о центре тяжести детали, что фиксируется по совпадению информации, заданной на отработку, иинформации, поступающей в блок 5 формирования сигналов перемещения с выхода блока 7 датчиков положения, из блока 5формирования сигналов перемещения в блок 1 О управления поступает импульс конца отработки. По этому сигналу блок 10 управления снова выдает команду на вычисление координат центра тяжести детали, что необходимо для компенсации погрешности отработки вычисленных в предыдущем цикле координат центра, вызванной приближенным характером реализуемых соотношений, однако в каждом последующем цикле вычислений и отработки координат центра эта погрешность будет уменьшаться, стремясь к нулю. При определении в последующем цикле вычислений нулевых значений координат Х и У центра тяжести детали срабатывает нуль-орган 8. Под действием сигнала. с выхода нуль-органа 8 блок 10 управления включит режим определения угла ориентации детали.В режиме определения угла ориентации 35 4 О 45 5 О 55 блок 10 управления запускает блок 9 круговой развертки. Выходные сигналы блока 9 круговой развертки поступают на входы коммутатора 12 разверток. Управляющие сигналы, поступающие из блока 10 управления в режиме определения угла ориентации детали на вход коммутатора 12 разверток, обеспечивают прохождение сигналов с выхода блока 9 круговой развертки на выход коммутатора 12 разверток. Это обеспечивает форми-, рование дискретной круговой развертки вокруг центра тяжести детали. Одновременно на другом выходе блока 9 круговой развертки вырабатываются значения угловых расстояний, разделяющих две соседние точки дискретной круговой развертки. На основании логических значений сигналов с выхода блока 1 ввода изображения, значений угловых расстояний с выхода блока 9 круговой развертки и управляющих сигналов с выхода блока 10 управления операционный блок 2 вычисляет значение угла ориентации. После окончания вычислений угла ориентации его значение с выхода ойерационного блока 2 с помощью коммутатора 3 команд по сигналу из блока 10 управления записывается в определенную ячейку блока 4 памяти. Затем блок 10 управления выдает в блок 5 формирования сигналов перемещения команду на прием вычисленного значения угла ориентации детали для отработки приводами 6 исполнительного органа робота. Вследствие соответствия систем координат при вычислении и отработке угла ориентации его значение передается в блок 5 формирования сиг налов перемещения без промежуточного преобразования. После разворота схвата робота на величину угла ориентации детали на вход блока 10 управления из блока 5 формирования сигналов перемещения поступает им 10 пульс конца отработки, по которому повторяется цикл вычислений угла ориентации. Это необходимо для контроля совершенного движения и повышения помехоустойчивости устройства. При получении нулевого значения угла ориентации срабатывает нуль орган 8 и блок управления 10 выдает в блок 5 формирования сигналов перемещения команду на взятие детали.Использование предлагаемого устройства позволяет применять .для захвата неориентированных деталей манипуляторы, имеющие цилиндрическую систему координат, что существенно расширяет функциональные возможности устройства по сравнению с известными.25формула изобретенияУстройство для управления адаптивным роботом, содержащее последовательно соединенные блок ввода изображения, уста- З 0 новленный на схвате исполнительного органа робота, операционный блок, коммутатор команд, блок памяти; блок формирования сигналов перемещения, приводы и блок датчиков положения, первый, второй и третий выходы которого подключены ко второму, третьему и четвертому входам блока формирования сигналов перемещения соответственно, второй выход блока памяти соединен со входом нуль-органа, а также блок круговой развертки и последовательно соединенные блок управления, блок формирования прямоугольного растра, второй выход которого соединен со вторым входом операционного блока, и коммутатор разверток, выход которогоподключен к входу блока ввода изображения, а второй вход - к первому выходублока круговой развертки, второй выход которого соединен с третьим входом операционного блока, вторым выходом подключенного к первому входу блока управления, второй вход которого соединен со вторым выходом блока формирования сигналов перемещения, третий вход - с выходом нуль-органа, второй выход - с пятым входом блокаформирования сигналов перемещения, третий выход - со вторым входом коммутатора команд, четвертый выход - с четвертымвходом операционного блока, пятый выходс входом блока круговой развертки, а шестой выход - с третьим входом коммутатораразверток, отличающееся тем, что, с цельюрасширения функциональных возможностейустройства, оно содержит первый двоичныйумножитель, первый счетчик и последовательно соединенные генератор, элемент И,второй двоичный умножитель, третий двоичный умножитель и второй счетчик, второйвход которого подключен ко второму выходу блока датчиков положения, а выход -к шестому входу блока формирования сигналов перемещения, седьмой вход которогосоединен с выходом первого двоичного ум ножителя, первый вход которого подключенк выходу второго двоичного умножителя, авторой вход - к второму выходу блока памяти, третий выход которого соединен совторым входом третьего двоичного умножителя, первый выход блока датчиков положения подключен ко второму входу второгодвоичного умножителя, второй выход которого через первый счетчик соединен с четвертым входом блока управления, шестойвыход которого подключен ко второму входу элемента И.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР47394, кл. б 05 В 15/00, 1977.2. Авторское свидетельство СССР по заявке2528924/18-24, кл. В 25 1 9/00, 1978Составитель ЕТехред А. БойкаТираж 940 олито Государственно елам изобретени сква, Ж - 35, Р Патент, г. Уж го комй и о аушска город,Редактор М. ЛысогоровЗаказ 4055/74ВНИИПИпо д13035, МоФилиал ППП КоррекПодписитета СССРткрытийя наб., д. 4/5ул Проектная 4 тор М. Демчиное
СмотретьЗаявка
2749998, 10.04.1979
РЫБИНСКИЙ АВИАЦИОННЫЙ ТЕХНОЛОГИ-ЧЕСКИЙ ИНСТИТУТ
ГЛАДШТЕЙН МИХАИЛ АРКАДЬЕВИЧ, КОМАРОВ ВАЛЕРИЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 15/00
Метки: адаптив-ных, роботом
Опубликовано: 30.05.1981
Код ссылки
<a href="https://patents.su/5-834667-ustrojjstvo-dlya-upravleniya-adaptiv-nykh-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптив-ных роботом</a>
Способ формирования частотно-импульсных сигналов датчика перемещения и устройство для его осуществления

Номер патента: 905993
Опубликовано: 15.02.1982
Авторы: Аршинов, Бирюков, Фадеева, Хуторецкий
МПК: H03K 5/00, H03K 5/153
Метки: датчика, перемещения, сигналов, формирования, частотно-импульсных
...триггера и с одной извыходных шин направления движения,нулевой выход однотактного триггерасоединен с вторым входом седьмогоэлемента И и с другой из выходныхшин направления движения, а выходышестого и седьмого элементов И соедииены соответственно с выходными шинами сложения и вычитания.На фиг. 1 изображена функциональная схема устройства для осуществления способа на фиг. 2 - временныедиаграммы работы устройства (а,б,в,г)5993 510 15 20 25 30 35 45 50 7 90 на вход первого формирователя 13, который формирует сигнал, перепад 1/О которого запускает второй формирователь 14, С помощью элемента ЗАПРЕТ 11 проверяется достоверность входного сигнала. При наличии нулевого сигнала на выходе элемента ИЛИ 3 формируется и запоминается...
Устройство для формирования гармонических многофазных сигналов управления электроприводом переменного тока

Номер патента: 736328
Опубликовано: 25.05.1980
Авторы: Бродовский, Жилин, Иванов
МПК: H02P 7/42
Метки: гармонических, многофазных, переменного, сигналов, формирования, электроприводом
...многофазных сигналов, при этом один из не 1 ппзертирующих входов первого сумматора подключен к первому выходу фор - мирователя двухфазных сигналов непосред - ственно, а другой его неиц вход - ко второлеу выходу форлеироветеля двухфазных сигналов через ОднО множитольное устройство, неьнвертирующий вход второго сумматора подключен ко ггороыу выходу формирователя двухфазных сигналов непосредственно, а его инвертирующий вход - к первому выходу форлпяювеГеля двухфазных сегнелов чав рез друго л.цожительное устройство, вторые входы которых подтппочены к в. ходу определителя кру-. Оной частоты сиг - напои.На чертеже представлена функциональная схеме предлагаемого устройстве.Блок 1 датчиков многофазных свгналов подключен выходами к...
Устройство формирования и поиска сигналов записи
Номер патента: 930367
Опубликовано: 23.05.1982
Авторы: Гольдрин, Золотаревский, Нэллин, Смирнов, Шкуратов
МПК: G11B 5/012
Метки: записи, поиска, сигналов, формирования
...автономного контроля. В режиме обмена на этот выход выдается первая последовательность. Выбор режима определяется сигналом на шине 31.После определения границы символа на одном из выходов блока 7 появля- у 5 ется сигнал, изменяющий, работу коммутатора 10 таким образом, что последовательности синхроимпульсов и импульсов данных на выходах коммутатора 10 меняются местами. Призо этом в регистре 25 формируется код в в разрядах которого "единицы" и "нули" соответствуют наличию или отсутствию синхроимпульсов в позициях адресного маркера. В дальнейшем иденти 35 фикация адресного маркера производится с помощью этого кода.Одновременно из блока 8, в котором хранятся "образцы" служебных символов, по сигналу с входа 27устройства выбирается...
Устройство формирования частотно-модулированных сигналов

Номер патента: 1518867
Опубликовано: 30.10.1989
Автор: Королев
МПК: H03B 23/00, H04L 27/10
Метки: сигналов, формирования, частотно-модулированных
...считая от момента начала модуляции, соответствует значениям Т К),В отсутствие ошибок, т.е. при У (Т) = О, имеютгде Т(М) - требуемое положение нулейфункции (1).Расстояние между соседними нулями частотно-модулированного сигнала определяется как0 (М) = Т 1 М)-Т (М) - в отсутствие ошибок.0 Ф 1) = ТФ)-Т " (М) - при наличии ошибок.Наличие фазового рассогласования У (Т) приводит к появлению временного рассогласования Е (Т), определяемого следующим образомЕТ ф 1 = 0 Ф) - Р Ф") (3)Величина Е Т " (М) формируется на выходе измерителя 9, На выходе сум матора 10 кодов вырабатывается величина а Е 1 Т (М), равная Е Т )1О) + Е ГТ" Ю)1. При этом запись числа но второй блок 12 памяти происходит по переднему фронту импульса формирователя 4, а формирование...
Система выравнивания сигналов

Номер патента: 699327
Опубликовано: 25.11.1979
МПК: G01D 5/247
Метки: выравнивания, сигналов
...при необходимости,формируется заново, так как анализсостояний измерительных каналов 3осуществляется непрерывно,Ьлок 8 контроля кадрового интервала содержит Й ячеек контроля кадровых интервалов в каждом измерительном канале. Принцип работы блока 8рассмотрим на примере одной ячейкиконтроля, функциональные связи кото- ЭОрой приведены на фиг. 5, где изображены ячейки 25-х контроля кадровогоинтервала в канале З-х, первый 71,второй 72, третий 73 управляющие выходы, управляющий вход 74 и входы 70. 35В табл. 1 Фиг. 8 показан примерный код 110011 кадрового интервала,который следует в каждом измерительном канале 3 одновременно. Такой коддостаточен для реализации сдвига 40вправо и влево на два такта(два бита информации в канале). Присдвиге...
Предыдущий патент: Устройство для адаптивного управ-ления
Следующий патент: Следящая система
Случайный патент: Узел инструмента для горячей обкатки концов трубчатых заготовок экна-2