Устройство для управления адаптив-ным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 830304
Автор: Меньших
Текст
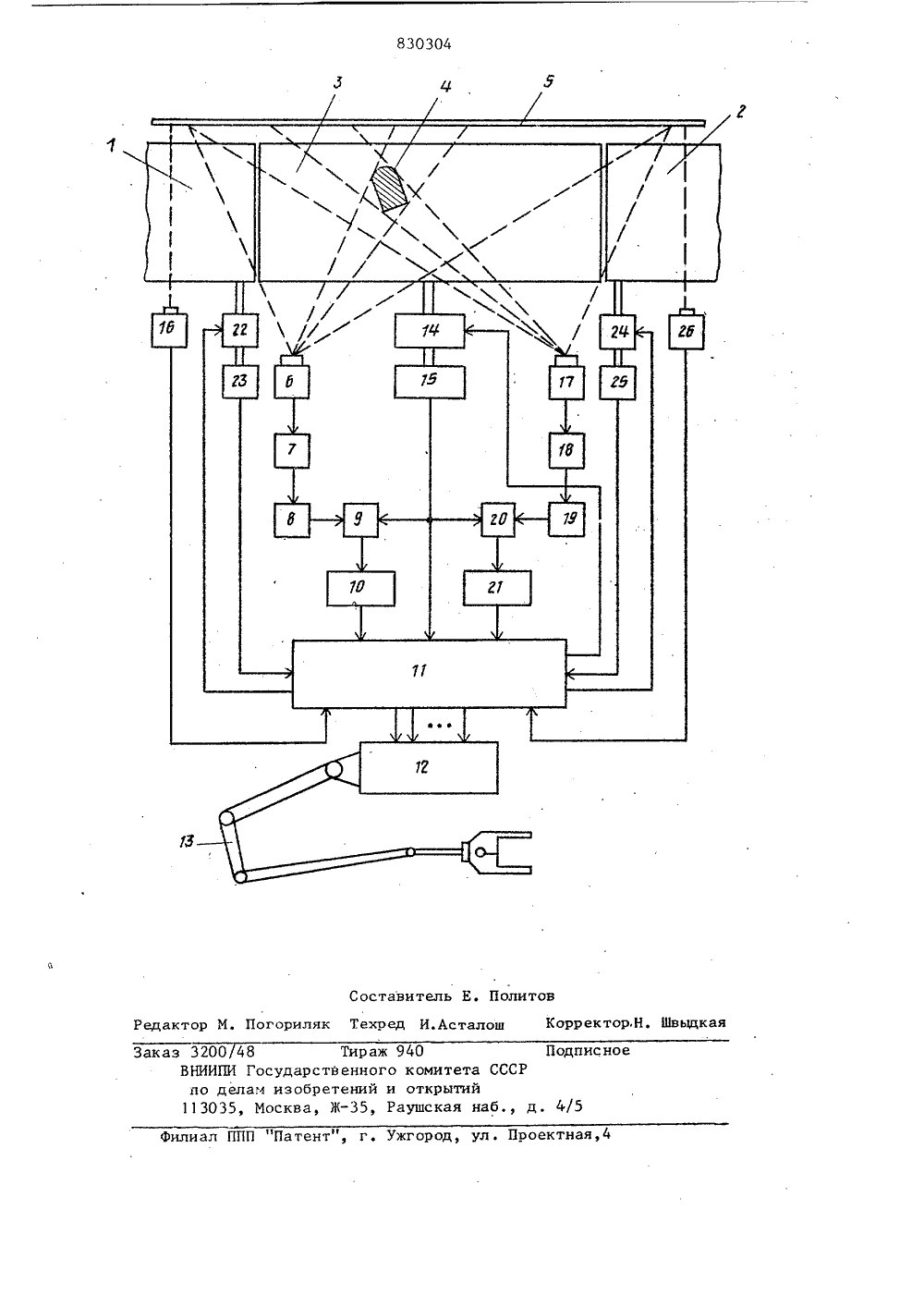
(22) Заявлено 13.04. 79 (21) 2752788/18-24 Государственный комитет СССР до делам изобретений и открытий.(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ Изобретение относится к техничес-. кой кибернетике и автоматизированных систем управления и может быть использовано при создании устройств для управления адаптивным, роботом, преимущественно обслуживающим конвейерныелинии.Известные устройства для управления адаптивньи роботом, содержацие блок памяти, спецпроцессоры, телевизионную.10 передающую камеру, дисплей, преобра-зователи, блок печати и блок управления приводами исполнительного органа робота 11Однако устройство .является слож- .нымеНаиболее близким техническим решением к изобретению является устройство,содержащее излучатель и последовательно соединенные первый диссектор, первый формирователь строб- импульсов,.первый преобразователь угол-код,.первый вычислитель координат, первый блок памяти, вычислительный блок и приводы исполнительного органа робота, а также привод и датчик вращения рабочего стола 2,Недостатком этого устройства является наличие вращения рабочего стола, которое снижает быстродействие устройства, Последнее связано с тем, что угловая скорость вращения рабочего стола ограничена устойчивостью объектов на рабочем столе, определяемой действием на объекты центробежных сил. Кроме того это устройство вырабатывает малый объем информации о расположении объекта манипулирования, что влияет на точность его захвата роботом, а также неприменимо дл работы с конвейерной линией, состоящей из нескольких подвижных участков.Цель изобретения - увеличение надежности и быстродействия устройства, а такжеповышение его точности и распЫрение функциональных возможностей.30304 ф 5 10 15 т20 25 30 35 40 45 50 55 3 8Цель достигается тем, что устройство содержит механически связанныепервые привод и датчик перемещенияленты конвейера и оптически связанныйс излучателем, первый приемник, выходкоторого соединен со вторым входомвычислительного блока, третий входкоторого подключен к выходу первогодатчика перемещения ленты конвейера,второй выход которого соединен совторым входом первого вычислителякоординат, а второй выход - ко входупервого привода перемещения лентыконв ейера,Устройство также содержит последовательно соединенные второй диссектор, второй формирователь стробимпульсов, второй преобразователь.угол-код, второй вычислитель координаи второй блок памяти, выход которогоподключен к четвертому входу вычислительного блока, выход первого датчикаперемещения ленты конвейера подключенко второму входу второго вычислителякоординат,Кроме того, устройство содержитвторые привод и датчик перемещенияленты конвейера, а также механическисвязанные третьи привод и датчик перемещения ленты конвейера, причефвыход второго датчика перемещенияленты конвейера соединен с пятымвходом вычислительного блока, к шестому входу которого подключен выходтретьего датчика перемещения лентыконвейера, а входы второго и третьего приводов перемещений ленты конвейера соответственно соединены стретьим и четвертым выходами вычислительного блока.Устройство, также содержит оптически связанный с излучателем второйприемник, выход которого соединен сседьмым входом вычислительного блока,На чертеже изображена функциональная схема устройства.Устройство содержит входной 1, выходной 2, средний 3 участки лентыконвейера, объект.4, излучатель 5,первый диссектор 6, первый формирователь 7 строб-импульсов, первыйпреобразователь 8 угол-код, первыйвычислитель 9 координат, первый блок10 памяти, вычислительный блок 11,приводы 12 исполнительного органаробота, исполнительный орган 13 робота, первый привод 14 перемещенияленты конвейера, первый датчик 15 перемещения ленты конвейера, первыйприемник 16, второй диссектор 17второй формирователь 18 строб-импульсов, второй преобразователь 19 уголкод, второй вычислитель 20 координатвторой блок 21 памяти, второй привод 22 перемещения ленты конвейера,второй датчик 23 перемещения лентыконвейера, третий привод 24 перемещения ленты конвейера, третий датчик 25 перемещения ленты конвейера,второй приемник 26.Устройство работает следующимобразом,В случае перемещения объекта 4на ленте конвейера, представляющейединое целое число, лента перемещается под действием первого привода 14перемещения ленты конвейера, управляемого от вычислительного блока 11в старт-стопном или непрерывном режиме. Величина перемещения ленты конвейера в функции времени задается первым датчиком 15 перемещенияленты конвейера, первый выход которого связан с третьим входом вычисли-тельного блока 11. При этом отсчетвремени может исчисляться от моментапересечения объектом 4 линии оптической связи излучателя 5 и первогоприемника 16, выход которого соединенсо вторым входом вычислительного блока 11. Ленту конвейера как целоеможно условно разбить на участки -входнбй 1, выходной 2 и средний 3.На первом участке определяется момент пересечения объектом 4 линииоптической связи излучателя 5 спервым приемником 16, на второмосуществляется захват объекта 4 сходу при непрерывном режиме движения ленты конвейера или после остановки ленты в старт-стопном режимеработы конвейера, а на третьем -зрительный анализ выпукло-преобразованного контура объекта 4 в плоскости зрительного сканирования первогодиссектора 6, причем указанный контур устанавливается не полностью, алишь фрагментарно т.е. не по всемупериметру объекта 4 в плоскости егозрительного сканирования.Процесс фрагментарного зрительного восприятия контура объекта 4,перемещающегося поступательно с постоянной скоростью по среднему участку ленты конвейера, описывается следующим образом.На фотокатоде первого диссектора 6(а в случае применения двух диссекторов, то и второго диссектора 17)формируется изображение в виде прерывистой светлой линии, Ее прерывание объясняется фактором затенения излучателя 5 объектом 4 в поле зрения диссектора. Считывание электронной щелью диссектора 6, указанной прерывистой светлой линией, приводит 10 к возникновению на выходе диссектора 6 широтно-импульсного сигнала, период следования которого равен периоду электронной развертки в диссекторе 6.Широтно-импульсная последователь ность преобразуется в первом формирователе 7 строб-импульсов в парные строб-импульсы, соответствующие спаду и фронту импульсов в указанной широтно-импульсной последовательности.гО Нечетные строб-импульсы соответствуют начальной границе теневого сектора, а четные - конечной границе того же теневого сектора в каждом из циклов зрительного сканирования 25диссектором 6 при наличии в его ноле зрения непрозрачного объекта. Зна" чения азимутов визирования объекта 4преобразуются в двоичный код в первом преобразователе 8 угол-код, откуда 30 кодированные последовательности посту" пают раздельно для начальной и конечной границ визирования объекта на первый вход первого вычислителя 9 координат. Первый датчик 15 пере мещения ленты конвейера преобразует . значение продольной координаты (вдоль линии движения ленты конве- йера) движущегося объекта 4, иа" пример точки его сечения, лежащей на средней линии, разделяющей продольный размер объекта 4 на две равные части, причем продольный размер объекта определяется произведением скорости движения конвейера на разность моментов времени пересечения задней и передней частями объекта 4 линии оптической связи первого приемжка 16 с излучателем 5.В случае, когда лента конвейера представляет собой не единое целое, . а разбита на раздельно управляемые участки - входной 1, выходной 2 и средний 3. При синхронной работе приводов 14,22,24 перемещения указанных участков ленты конвейера, объект 4 движется с постоянной скоростью на всех указанных участках, как в 50 830304 6случае одноленточного конвейера.Разделение конвейера на входной 1и средний 3 участки ленты позволяетсущественно увеличивать удельнуюзагрузку на единицу его длины, т,е.уменьшить интервал между загружаемыми на ленту конвейера объектами,а также увеличить длину среднегоучастка 3, что приводит к увеличению точности воспроизведЕния контура объекта с помощью зрительногосенсора робота, за счет увеличенияинформации в фрагментарном описанииэтого контура, Для того, чтобы насреднем участке 3 не могло одновременно находиться два объекта, управление движением участков 1 и 3 осуществляется раздельно с помощьювычислительного блока 11, на второйвход которой поступают сигналы с вы"ходя приемника 16, сигнализирующие. о подходе второго объекта, еслипервый объект еще находится в зонедействия зрительного сенсора робота(на участке ф. В этом случае привод22 останавливает входной участок 1ленты конвейера, а анализируемыйобъект движется на ленте среднегоучастка 3 без каких-либо изменений.Такой прием эквивалентен разряжениюинтервалов между объектами, устаналиваемыми на входном участке лентыконвейера, В этом случае устройствоуправления автоматически задаеттрубемый интервал между объектами,поступающими в зону их осмотра зрительным сенсором робота, что устраняетнеобходимость в наличии технологического запаса по интервалу, гарантирующего работу линии без сбоев, В принципе допустим такой режим работы, прикотором лента среднего участка конвейера движется с переменной скоростью, Например, скорость протяжки ленты среднего участка начинаетувеличиваться .по сравнению со скоростью протяжки ленты входного участка на ленту с момента передачиобъекта с ленты входного участка наленту среднего участка конвейера(припередаче объекта с участка на участок скорости протяжки лент этих участков должны быть строго одинаковымиЭто также эквивалентно разряжгниюобъектов на исходном участке конвейера, на который объекты можно загружать достаточно часто, Причем в этомслучае входной участок ленты конвейера может двигаться непрерывно, а не встарт-столпом режиме подачи объектов на средний участок 3 конвейера. Естественно, что при переменном режиме работы ленты среднего участка мгновенная скорость движения этой ленты должна быть всегда известна (эта инФормация определяется работой датчика 15 перемещения ленты конвейера),Что необходимо для вычисления 10 положения объекта 4 во времени относительно диссекторов 6 и 17.Применение изобретения позволяет повысить надежность, быстродействие и расширить Функцноналыые возмажнос ти устройства за счет обеспечения виэуалрзации объектов, представляет собой часть ленты конвейера. Формула изобретения 1, Устройства для управления адап тивжщ роботом, содержащее излучатель и последовательно соединенные первый дисеектор., первый Формирователь строб-импульсов, первый преобразователь угол-код, первый вычислитВль координат, первый блок памяти, вычислительный блок и приводы исполнительного органа рабата, а т л и ч а ющ е е с я тем, чта, с целью увеличения надежности и быстродействия устройства, аносодержит механически связанные первые привод и датчик перемещения ленты конвейера и оптически связанный с излучателем первый приемниквыход которого соединен со40 вторым входом вычислительного блока третий вход которого подключен к выходу первого Датчика перемещения ленты конвейера и ка второму входу первого вычислителя коордйнат, а второй выход - ко; ",5 входу первого привода перемещения ленты конвейера. 830 04 82, Устройство па и, 1, о т л ич а ю щ е е с я тем, что, с цельюповышения точности устройства, оносодержит последовательно соединенныевторой диссектор, второй Формирователь строб-импульсов, второй преобразователь угол-код, второй вычислитель координат и второй блок памяти, выход которого подключен к четвертому входу вычислительного блока,выход первого датчика перемещенияленты конвейера подключен ко второмувходу второго вычислителя координат., 3. Устройство,по пп,1 и 2, о тл и ч а ю щ е е с я тем, что, сцелью расширения Функциональных возможностей, устройство содержит меха"нически связанные вторые привод идатчик перемещения ленты конвейера,20 а также механически связанные, третьипривод и датчик перемещения лентыконвейера, причем выход второго датчика перемещения ленты конвейерасоединен с пятым входом вычислительного блока к шестому входу которогоподключен выход третьего датчика перемещения ленты конвейера, а входывторого и третьего приводов перемещения ленты конвейера соединены соответственно с третьим и четвертымвыходами вычислительного блока.4, Устройство по пп, 1-3, о т л и. ч а ю щ е е с я тем, что, с цельюрасширения Функциональных возможностейустройства, оно содержит оптическисвязанный с излучателем второй приемсниквыход которого соединен с седьмым входом вычислительного блока.Источники информации,принятые во внимание при экспертизе1Дистанционно-управляемые роботы-манипуляторы,. Сб. статей, Цодред, Б, П, Попова, М., "Миф,1976,с. 99-134.2. Авторское свидетельство СССРпо заявке В 2056396/18-24кл. В 25;Г 13/00, 1974 (прототип).830304 каз 3200 48 Тираж 940 ВНИИПИ Государственного ком но делам изобретений и отк 113035, Москва, Ж, Раушспиен тета ытий д. 4/5 я н илиал ППП "Патент", г. Ужгород, ул. Проектная,Составитель Е. ПолитовРедактор М. Погориляк Техред И.Асталош Корректор,Н. Швыдкая
СмотретьЗаявка
2752788, 13.04.1979
МЕНЬШИХ ОЛЕГ ФЕДОРОВИЧ
МПК / Метки
МПК: G05B 15/00
Метки: адаптив-ным, роботом
Опубликовано: 15.05.1981
Код ссылки
<a href="https://patents.su/5-830304-ustrojjstvo-dlya-upravleniya-adaptiv-nym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптив-ным роботом</a>
Устройство для дистанционного управления и контроля двухпозиционных объектов с блоками защиты

Номер патента: 1226568
Опубликовано: 23.04.1986
Авторы: Берзиньш, Волков, Шиманович
МПК: H02J 13/00
Метки: блоками, двухпозиционных, дистанционного, защиты, объектов
...этрм сигнализатор 16.1 отключается,так как диоды 12.1 выносного поста 5.1Ф управления и диод 23.1 приемного блока включены встречно, а сигнализатор 15.1 этого же выносного поста управления включится - диод 10.1 включен согласно с диодом 23.1 приемного блока.Такое состояние сигнализаторов 15.1 и 16.1 указывает на то, что положение переключателя 6. 1 состояния не соответствует состоянию объекта контроля. Нажатием кнопки 17.1 на выносном посте 5.1 управления посылается команда на включение объекта. При этом через обмотку реле 21,1 включения приемного блока 20.1 протекает ток, достаточный для его включения. После включения объекта и переключения его концевых контактов, 30контакт 26.1 разомкнется, а контакт 25.1 замкнется. При этом...
Информационно-измерительная система для определения компонент перемещений и деформаций объекта

Номер патента: 1783283
Опубликовано: 23.12.1992
Автор: Нестеров
МПК: G01B 7/00
Метки: деформаций, информационно-измерительная, компонент, объекта, перемещений
...канал шестого измерительного преобразователя подключен к вычитающему входу девятого блока вычитания и первому входу девятого блока сложения, выход второго чувствительного элемента шестого датчика через соответствующий канал шестого измерительного преобразователя подключен к суммирующему входу одиннадцатого блока вычитания и первому входу одиннадцатого блока сложения, выход третьего чувствительного элемента шестого датчика через соответствующий канал шестого измерительного преобразователя подключен к вычитающему входу десятого блока вычитания и первому входу десятого блока сложения, выход четвертого чувствительного элемента шестого датчика через соответствующий канал шестого измерительного преобразователя подключен к вычитающим входам...
Способ определения компонент вектора перемещения точек поверхности объекта

Номер патента: 1779914
Опубликовано: 07.12.1992
Автор: Шабуневич
МПК: G01B 11/16, G01B 9/021
Метки: вектора, компонент, объекта, перемещения, поверхности, точек
...самой фотопластинки.Целью изобретения является повышение точности определения НКВП точек поверхности реальных объектов за счет устранения влияния НКВП точек поверхности фотопластинки,Поставленная цель достигается тем, что в способе определения компонент вектора перемещения (КВП) точек поверхности абьекта, заключа ощемся в том, что закрепляют на поверхности обьекта посредством ПОС фотопластинку, освещают ее пучком когерентного излучения, записывают на ией до и после иагружеиия объекта голограммы его поверхности, восстанавливают полученнуо двухэкспозициоииуо гопограмму, регистрируют иитерферограммы и 5 10 15 20.25 30 35 40 45 рассчитывают КВП, предложено после записи двухэкспозиционной голограммы на поверхность фотопластинки...
Способ измерения углового перемещения объекта

Номер патента: 1791705
Опубликовано: 30.01.1993
Автор: Титов
МПК: G01B 21/22
Метки: объекта, перемещения, углового
...О 1;и - число двоичных разрядов;й - коэффициент электрической редукции информационного сигнала Оь равный числу штрихов на растре,При максимально допустимой угловой скорости Ймакс еще реализуется максимальное число циклов преобразования Кмако = п 1 й) эа оборот, т,е. обеспечивается формирование требуемого числа дискрет- ных уровней квантования за один оборот;(7),50 это смещение будет равно шагуЮ/2(т.к. Л =й = Юг ), в котором число 2 УУ 2 шагов И/з уложится М раз (т.к. М), При 1 = й/2 пространственное смещение будет равно половине шага ууг, т,к, 2 д й й .Югмм+т 2 7 й+т- г и, следовательно, в этом интервале уложится число шагов Юз только й/2 раз, и т.д,При вращении подвижного растра датчика будет происходить модуляция проходящего через...
Устройство для сопряжения контролируемых объектов с управляющей цифровой вычислительной машиной

Номер патента: 640285
Опубликовано: 30.12.1978
Автор: Винник
МПК: G06F 3/04
Метки: вычислительной, контролируемых, машиной, объектов, сопряжения, управляющей, цифровой
...адреса объектов контроля поступает на блок 5 согласования, где происходит согласование его с информацией результатов измерения блоков 6 - 8 и пеоедача на 45 выходы 10 - 12 устройства, По команде измерение блок 3 формируст соответствующим блокам 6 - 8 сигнал запуск, причем сигнал запуск на входы блоков 6, 7, 8 может поступать последовательно, парад лельно или индивидуально в режнмс рабаты диалог, но всегда сигнал поступает на входы блоков 6 - 8 с необходимой временной задержкой после коммутации и установления переходных процессов. После по лучения сигнала запуск блоки 6, 7, 8 начинают балансировку и в конце выдают информацию результатов измерения и импульс конца преобразования, Информация результатов нзмсрсНия поступает в блок 4 00 и...
Предыдущий патент: Пневматический пропорциональнодифференциальный регулятор
Следующий патент: Устройство для программногоуправления обектом
Случайный патент: Фильтр ленточного типа для центробежного разделения суспензии