Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
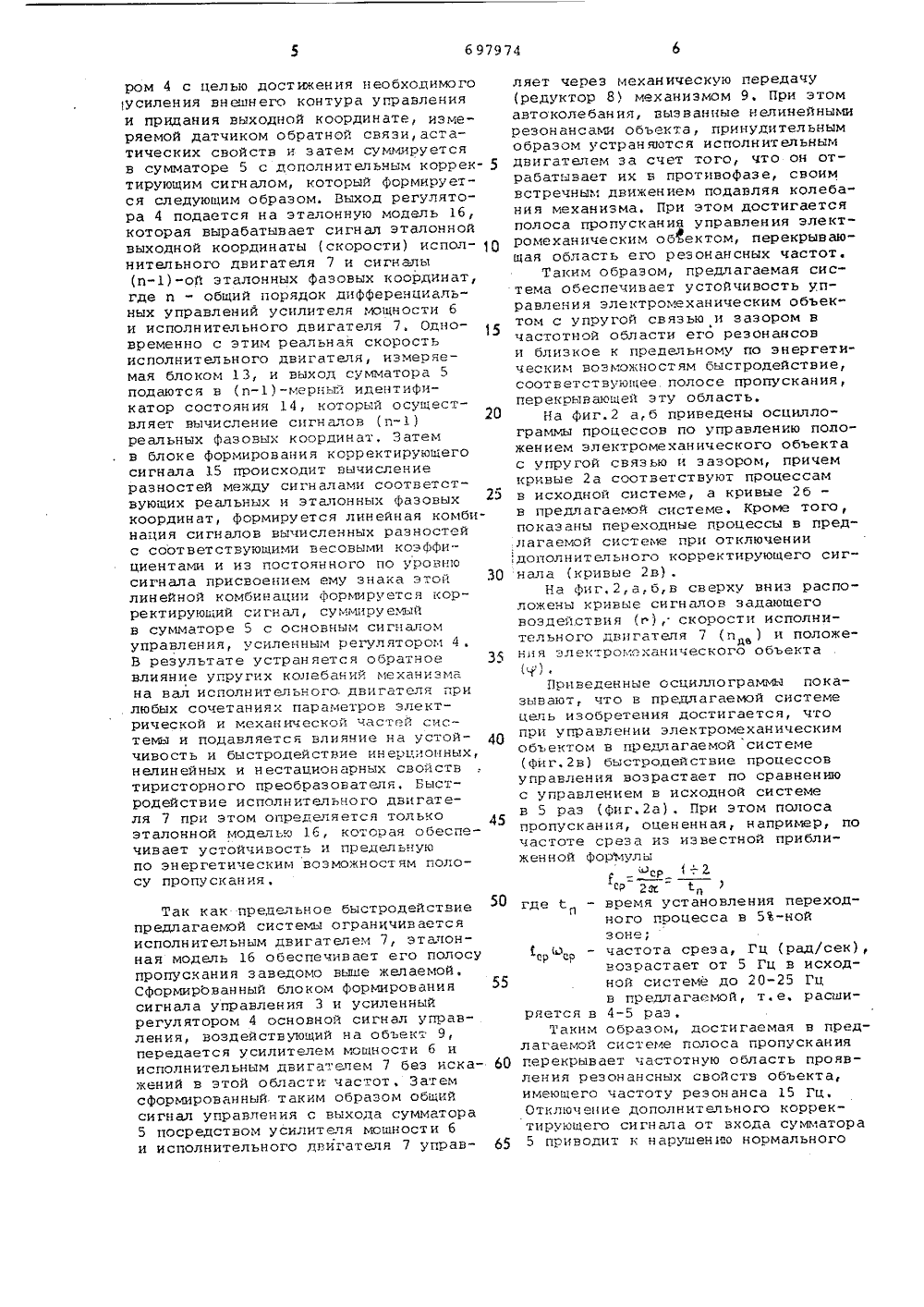
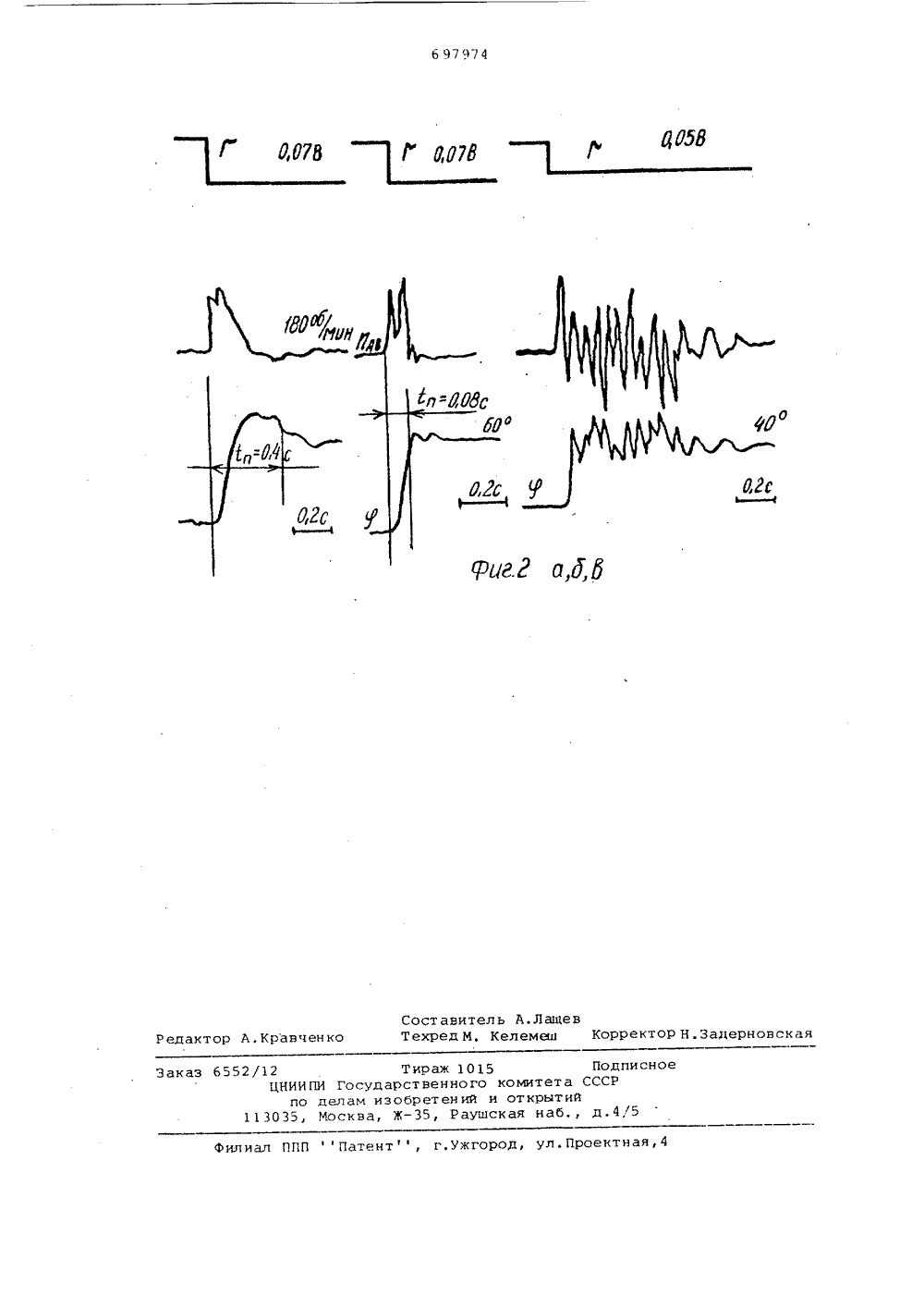
щ 697974 Союз СоветскихСоивлистииескизРеспублик 1) Дополиителькое к авт. св 22) Заявлено 3005.7821) 2621957/18-2 17/02 ем заявки Й с присоеди твениый комитетСССРаи изобретенийоткрытий оеуЛ 23) Приоритпубликоваио 1511,79, Бюллетень Йоата опубликовании описания А, Борцов, С, В,Демидов, Н,Д.Полях и В.В.Путов2) Авторы Особое конструкторское бюро станкостроенияи Ленинградский ордена Ленина электротехническиинститут им, В.И,Ульянова (Ленина) 71) Заявител) СИСТЕМА У НИ Изобретение относ и может быть использ ления электромеханич в том числе с упруго ром, н апр имер в ст ан темах управления мех режущих станков,ат нк тся к автовано для уским объексвяз ью иостроениинизмами ме п ав том заз в сис-5т аллоИзвестна система управления электромеханическими объектамн, содержащая последовательно соединенные регулятор, силовой преобразователь, исполнительный двигатель, механическую передачу и механизм, Для ограничения колебаний в Упругой связи механизма 15 она снабжена дополнительным контуром, состоящим из датчика тока, подключенного через диодный мост, интегрирующее звено и потенциометр к блоку регулируемого токоограничения, воздей ст вующ его н а о бр ат ную св яз ь р е гул ятора, Кроме того, с целью ограничения динамических нагрузок, возникающих из-за зазора, организован второй дополнительный контур, воздействующий 25 на регулируемое токоограничение и образованный датчиком обратной связи, присоединенным к выходу механизма, дифференцирующим блоком и последовател ьным мо сто м1) . Однако в известном устройстведополнительные контуры ограничиваютколебания в упругой связи посредствомуменьшения усиления и токоограничения, что снижает ускорения механизмав области резонансных частот. Поэтомунедостатком этого устройства являетсяпринципиальная невозможность обеспечения быстродействия с полосой пропускани я, достигающей области резонансных частот упругого электромеханического объекта, Другим недостатком устройства является то, что включенныйв контур управления дифференцирующийблок приводит к, нежелательному усилению в области резонансных частотобъекта и снижает в целом его устойчивость в этой области,Наиболее близкой к предлагаемойявляется система управления, содержащая датчик скорости, последовательносоединенные регулятор и эталоннуюмодель и последовательно соединенныеусилитель мощности, двигатель и редуктор, подключенный ко входу объектауправления, к выходу которого черезпоследовательно соединенные датчикобратной связи и блок сравнения подсоединен вход дифференциатора 2),Однако эта система управленияимеет малую устойчивость и низкоебыстродей ст в ие,Цель и зо брет ен ия - повышен иеустойчивости и быстродействия приуправлении электромеханическим объектом с упругой связью путем подавленияего упругих колебаний при расширенииполосы пропускания за границу областирезонансных частот.Указанная цель достигается тем,что известная система содержит блокмасштабных коэффициентов, последовательно соединенные блок определениямодуля сигнала ошибки и блок формирования сигнала управления и последовательно соединенные идентификаторсостояния, блок формирования корректирующего сигнала и сумматор, первыйвыход которого соединен со входомусилителя мощности, второй выходс первым входом идентификатора состояния, первый вход - со вторым выходом регулятора, а второй вход -с выходом блока формирования корректирующего сигнала, второй вход которого соединен с выходом эталонной 25модели, выход дифференциатора черезпоследовательно соединенные блокмасштабных коэффициентов и блок формирования сигнала управления соединен со входом регулятора, второй выход измерителя ошибки соединен, совторым входом блока масштабных коэффициентов, кроме того, между регулятором и силовым преобразователем введен сумматор, а выход датчика скорости исполнительного двигателя через вновь вводимые последовательновключенные идентификатор состоянияи блок формирования корректирующегосигнала соединен со вторым входомсумматора, образуя внутренний контуруправления упругим объектом, и второй выход сумматора соединен со вторым входом идентификатора состояния,Так же введена эталонная модель,соединяющая второй выход регуляторасо вторым входом блока формирования.корректирующего сигнала,В такой системе движение исполнительного двигателя подчиняется оэталонной модели, а весь нелинейный упругий эффект лок ализ у ется на сторонемеханизма во внешнем контуре управления. В свою очередь, внешний контур настраивается на максимальновозможное с учетом энергетическихограничений исполнительного двигателя быстродействие, а возникающиев нем на частоте упругих резонансовколебания принудительно подавляютсябез потери быстродействия посредством 60блока формирования сигнала управления объектом,На фиг,1 .приведена функциональнаясхема предлагаемой системы управленияэлектромеханическим объектом с упру-, 65 гой связью и зазором; на фиг,2 а,б,восциллограммы переходных процессовв предлагаемой системе.Система управления содержит после 1 цовательно соединенные измерительошибки - блок сравнения 1, блок вычисления модуля сигнала ошибки 2, блокформирования сигнала управления 3,регулятор 4, сумматор 5, усилительмощности б,.исполнительный двигатель7, механическую передачу - редуктор8, объект управления - механизм 9,выход которого соединен через датчикобратной связи 10 с входом блокасравнения 1. Второй выход блокасравнения 1 через дифференциатор 11и блок масштабных коэффициентов 12соединен со вторым входом блокаформирования сигнала управления 3,а третий выход блока сравнения 1соединен со вторым входом блокамасштабных коэффициентов 12, Выходисполнительного двигателя 7 черездатчик скорости 13, идентификаторсостояния 14 и блок формированиякорректирующего сигнала 15 соединенсо вторым входом сумматора 5. Второйвыход регулятора 4 через эталоннуюмодель 16 соединен со вторым входомблока формирования корректирующегосигнала 15, а второй выход сумматора 5 подается на второй вход идентиФикатора состояния 14,Система работает следующим образом.Для обеспечения устойчивости привозникновении колебаний сигнал ошибки с выхода блока ср авн ен ия 1 пода-.ется на вход дифференциатора 11, который вырабатывает ее первую, вторуюи третью производные, Затем в блокемасштабных коэффициентов 12 формируется линейная комбинация с заданнымивесовыми коэффициентами самой ошибкии ее первой, второй и третьей производных. В блоке 3 формируется сигналуправления, равный значению модуляошибки с присвоением этому значениюзнака полученной линейной комбинациив блоке масштабных коэффициентов 12,Тем самым на выходе формирования сигнала управления блока 3 формируетсясигнал управления, имеющий регулируемое посредством выбора весовых коэффициентов блока масштабных коэффициентов 12-фазовое опережение по отношению к сигналу ошибки, в пределах отО до й, тогда как его амплитуда имеет величину, равную входной, Это устраняет нежелательный эффект повышенияусиления в области высоких частотдифферен ци атором и обеспечив ает работоспособность системз в области ре"зонансных свойств электромеханического объекта, Сформированный блокомформирования сигнала управления 3сигнал управления преобразуется пропорционально-интегрирующим регулятором 4 с целью достижения необходимогоусиления внешнего контура управленияи придания выходной координате, изме"ряемой датчиком обратной связи, астатических свойств и затем суммируетсяв сумматоре 5 с дополнительным корректирующим сиги алом, который формируется следующим образом. Выход регулятора 4 подается на эталонную модель 16,которая вырабатывает сигнал эталоннойвыходной координаты (скорости) исполнительного двигателя 7 и сигналы(и)"ой эталонных фазовых координат,где и - общий порядок дифференциальных управлений усилителя мощности би исполнительного двигателя 7. Одновременно с этим реальная скоростьисполнительного двигателя, измеряемая блоком 13, и выход сумматора 5подаются в ( и) мерный иден т ификатор состояния 14, который осуществляет вычисление сигн алов (п)реальных фазовых координат, Затемв блоке формирования корректирующегосигнала 15 происходит вычислениеразностей между сигналами соответствующих реальных и эталонных Фазовыхкоординат, формируется линейная комбинация сигналов вычисленных разностейс соответствующими весовыми коэффициентами и из постоянного по уровн 1 осигнала присвоением ему знака этой 30линейной комбинации Формлруется корректирующий сигнал, суммируемыйв сумматоре 5 с основным сигналомуправления, усиленным регулятором 4,В результате устраняется обратное 35влияние упругих колебаний механизмана вал исполнительного. двигателя прилюбых сочетаниях параметров электрической и механической частей системы и подавляется влияние на устойчивость и быстродействие инерцлонных,нелинейных и нестационарных свойствтиристорного преобразователя, Быстродействие исполнительного двигателя 7 при этом определя етс я тол ькоэталонной моделью 16, которая обеспечивает устойчивость и предельнуюпо энергетическим возможностям полосу пропу скан ия,Так как предельное быстродействие50 предлагаемой системы ограничивается исполнительным двигателем 7, эталонная модель 16 обеспечивает его полосу пропускания заведомо выше желаемой, Сформированный блоком формирования 55 сигнала управления 3 и усиленный регулятором 4 основной сигнал управления, воздействующий на объект 9, передается усилителем мощности 6 и исполнительным двигателем 7 без иска жений в этой области частот, Затем сформированный. таким образом общий сигнал управления с выхода сумматора 5 посредством усилителя мощности б и исполнительного двигателя 7 управ ляет через механическую передачу(редуктор 8) механизмом 9. При этомавтоколебания, вызванные нелинейнымирезон анс ами объекта, принудительнымобразом устран яются исполнительнымдвигателем за счет того, что он отрабатывает их в противофазе, своимвстречным движением подавляя колебания механизма. При этом достигаетсяполоса пропускания управления электромеханическим объектом, перекрывающая область его резонансных частот.Таким образом, предлагаемая система обеспечивает устойчивость управления электромеханическим объектом с упругой связью и зазором вчастотной области его резонансови близкое к предельному по энергетическим возможностям быстродействие,соответствующее полосе пропускания,перекрывающей эту область.На Фиг.2 а,б приведены осциллографы процессов по управлению положением электромеханического объектас упругой связью и зазором, причемкривые 2 а соответствуют процессамв исходной системе, а кривые 2 бв предлагаемой системе, Кроме того,показаны переходные процессы в предлагаемой системе при отключении,дополнительного корректирующего сигнала (кривые 2 в) .На Фиг,2, аб,в сверху вниз расположены кривые сигналов задающеговоздействия , скорости исполнительного двигателя 7 (и) и положенн я электромеханического объекта:),Приведен ные о сцилло гр ам ы по к азывают, что в предлагаемой системецепь изобретения достигается, чтопри управлении электромеханическимо бъ ектом в пр едл агае мой си ст еме(Фиг. 2 в) быстроцействие процессовуправления возрастает по сравнениюс управлением в исходной системев 5 раз (фиг. 2 а), При этом полосапропуск ан ил, оцен енн ая, н апример, почастоте среза из известной приближенной формулыЯср 1 - :2ор 20 с , )где п - время установления переходного процесса в 5-нойзоне;(до - частота среза, Гц (рад/сек),орвозоастает от 5 Гц в исходной системе до 20-25 Гцв предлагаемой, т, е, расширяется в 4-5 раз,Таким образом, достигаемая в предлагаемой системе полоса пропусканияперекрывает частотную область проявления резонансных свойств объекта,имеющего частоту резонанса 15 Гц,Отключение дополнительного корректирующего сигнала от входа сумматора5 приводит к нарушенио нормальногофункционирования системы управления в сл ед с т в и е н едо пу ст имо го и ск аже н и я основного сигнала управления исполнительным двигателем, имеющим низкую собственную частоту пропускания и нелинейности.Предв арительные техн ико-э кон омически е расчеты показ али, что испол ьзование предлагаемого технического решения для упрМвления системой под ачи копиров ал ьн о-фр еэ ерн ого стан к а модели бБ 444 номенклатуры ЛСПО им.Я,М.Свердлова позволит увеличить производительность станка не менее чем на 15 Ъ, что даст годовой экономический эффект около 5,5 тыс.руб. на один станок..Формула изобретенияСистема управления, содержащая датчик скорости, последовательно соединенные регулятор и эталонную модель и последовательно соединенные усилитель мощности, двигатель и редуктор, подключенный ко зходу объекта управления, к выходу которого через последовательно соединенные датчик обратной связи и блок сравнения подсоединен вход дифференциатора, о т л и ч а ю щ а я с я тем, что, с целью повышения устойчивости и быстродей ст ви я си ст емы,она содержит блок масштабных коэффициентов, последовательно соединенные блок определения модуля сигналаошибки и блок формирования сигналауправления и последовательно соеди 5 ненные идентификатор состочния,блок формиро вани я корректирующего"игнала и сумматор, первый выходк оторо го с сед ин ен со входом у сил ит ел я мощности, второй выход - с первымвходом идентификатора состояния,первый вход - со вторым выходом регулятора, а второй вход - с выходомблока формирования корректирующегосигнала, второй вход которого соединен с выходом эталонной модели, выходдифференциатора через последовательно соединенные блок масштабных коэффициентовв и блок формиров ан ия си гн ала управления соединен со входом регулятора, второй выход блока сравнэ 20 ния - со вторым входом блока масштабных коэффициентов, а третий выход - со входом блока определениямодуля сигнала ошибки, выход датчикаскорости соединен со вторым входом25 ицентификатора состояния.Источники информации,принятые во внимание при экспертизе1 . Авторское свйдетельство СССРР 585583, кл . Н 02 Р 5/Об, 31,05, 72.30 2. Козлов Ю.М. и др. Беспоисковыесамонастраивающиеся системы, МНаука, 1969, с.338 (прототип).б 97974 Сост авитель А, Лащ Т ехред М. Келемеш ор А.Кравченко орректор Н.Задерновска е 2 Тираж 101 цНИИПИ Государственного по делам изобретений3035, Москва, Ж, Рауш 552 1 Подписноекомитета СССРоткрытийкая наб., д.4/5 Эака Филиал ППП Патент, г.ужгород, ул.Проект
СмотретьЗаявка
2621957, 30.05.1978
ОСОБОЕ КОНСТРУКТОРСКОЕ БЮРО СТАНКОСТРОЕНИЯ, ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ДЕМИДОВ СЕРГЕЙ ВЛАДИМИРОВИЧ, ПОЛЯХОВ НИКОЛАЙ ДМИТРИЕВИЧ, ПУТОВ ВИКТОР ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G05B 17/02
Метки:
Опубликовано: 15.11.1979
Код ссылки
<a href="https://patents.su/5-697974-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для автоматического поиска дефектов в логических блоках

Номер патента: 1108451
Опубликовано: 15.08.1984
Авторы: Байда, Гладков, Подкопаев, Семеренко, Шпилевой
МПК: G06F 11/00
Метки: блоках, дефектов, логических, поиска
...генератор импульсов, три триггера, дешифратор, три элемента И,пять элементов ИЛИ, причем выход генератора импульсов соединен с первыми входами первого и второго элементов И, второй вход и выход первого элемента И соединены соответственно с прямым выходом первого триггера и со входом первого распределителя импульсов, первый - пятый выходы которого соединены соответственно с первыми входами первого - четвертого элементов ИЛИ и с шестым выходом блока управления, единичный вход первого триггера соединен с четвертым входом блока управления и нулевым входом третьего триггера, единичный вход и инверсный выход которого соединены соответственно со вторым входом блока управления и с первым входом третьего элемента И,выход которого...
Устройство для сжатия информации

Номер патента: 830484
Опубликовано: 15.05.1981
Авторы: Галяс, Флоров, Цыганок
МПК: G08C 19/28
Метки: информации, сжатия
...8,4 постоянной памяти, сумматоры 71 - 7 н и блоки 6 - 6 сравнения 1 О 15 20 25 30 35 40 45 50 55 4образуют М каналов обработки инфор, ации. М выбирается, исходя из априорноч инфор мации об исследуемом процессе.Устройство работает следующим образом.В блоки 84 - 8 постоянной памяти до начала обработки сообщения заносятся значения постоянных приращений, соответствующие каждому каналу обработкио =Ь;Д(," 1=1 М,где Ь 1 - интервал дискритизации исследуемого процесса;Ь - коэффициент, определяющий приращение предсказанного значения по 1-му каналу за один интервал дискретизации. Коэффициенты Ь; определяются исходя из априорных данных об исследуемом процессе. Цикл обработки одного отсчета состоит из трех тактов. По первому такту содержимое блоков...
Многоканальное устройство телеконтроля

Номер патента: 1837345
Опубликовано: 30.08.1993
Авторы: Гурченок, Корнильев, Нарыжный, Фризюк
МПК: G08C 19/16
Метки: многоканальное, телеконтроля
...счетчик 5 оачередно переключается и с помощью деифраторэ 4 подключает поочередно сигнаы со входов коммутатора 3 на первый вход 45 ункциондльного преобразователя б, Каряжение постояно)ого тока с выхода датчиа-преобразователя 2 через коммутатор 3 оступает через токоограничительный реистор, включенный на входе функционэль ого преобразователя б, на первый и второй ходы двухпорогоного элемента сравнения 8, где происходит сравнение с устанонлен 1 ыми порогами, фор 1 лируел 1 ыми источником 27 опорных напряжений. При выходе 55 1 го контролируемого напряжения на нижий или верхний допустимые пределы, нэ ервом или отаром выходах элемента 28 равнения появляется напряжение лог.и 1", оторае через один из разделитель) ых диадан 291 или 292 и...
Устройство управления перестройкой частоты

Номер патента: 1840895
Опубликовано: 20.08.2014
Авторы: Бройде, Скуратовская
Метки: перестройкой, частоты
Устройство управления перестройкой частоты, состоящее из дешифратора номера канала гетеродина, соединенного по входу с выходом датчика случайных чисел, видеодетектора, подключенного ко входу анализатора помех и управляющего блока, выходы которого подключены к анализатору помех и датчику случайных чисел, отличающееся тем, что, с целью повышения эффективности перестройки частоты по случайному закону в условиях воздействия узкополосных шумовых помех, введены схема разделения, соединенная по одному входу с датчиком случайных чисел и первой схемой запрета, а по другому с анализатором помех, видеодетектором и второй схемой запрета, выход схемы разделения через анализатор помех подключен к схеме сравнения и первой схеме запрета, выход схемы...
Устройство для магнитной записи ивоспроизведения речевых сообщений

Номер патента: 830527
Опубликовано: 15.05.1981
Авторы: Петрулис, Тарнопольский
МПК: G11B 5/008
Метки: записи, ивоспроизведения, магнитной, речевых, сообщений
...выходу первогоблока 1 контроля и выполнено с первой и второй контактными группами34 и 35. Первая контактная группа 34третьего реле 28 подключена к первойвходной шине 36 и ко вторым входам 50 55 60 б 5 5 10 15 20 ки 10 и 11 второго лентопротяжногомеханизма 9 сопряжены с установленной на нем второй магнитной лентой12 и подсоединены к узлу 13 контактных групп второго коммутатора 14,вход которого соединен со вторымвыходом второго блока 8 контроля,Приэтом узел 13 контактных групп второгокоммутатора 14 подключен к первомувходу второго блока 8 контроля. Совторым входом второго блока 8 контроля и со вторым входом первогоблока 1 контроля через переключатель 15 соединен пульт 16 управления,Пульт 16 управления через включенныепоследовательно...
Предыдущий патент: Самонастраивающийся регулятор
Следующий патент: Устройство для программного управления исполнительными элементами
Случайный патент: Установка для выращивания растений