Устройство для контроля параметров якоря электромагнитного реле
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
(57) Изобретерольно-измерижет быть испо ТРОЛЯ ПАРАНИТНОГО РЕЛЕ ВО ДЛЯ КО ЭЛЕКТРОМА ние относ тельной т льзовано ся к конт- нике и моя контроля динамич рости и нитного ства, а(хода, ско- электромагих ироизводении регулиих араметро ния) яко еле в п акже пр ов ГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИпРи пгнт сссР ОПИСАНИЕ ИЗОБРЕ К А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(56) Авторское свидетельство СССРгг 1065826., кл. с 05 В 23/02, 1984.Авторское свидетельство СССРгг 991527, кл. с 05 В 23/02, 1983,ровочных работ. 11 ель изобретенияповышение достоверности контроля.Устройство содержит блок 1 питания,генератор 2 импульсов, датчик 4 тока,датчик 6 усилия пружины якоря электромагнитного реле, блок 12 регистрации, узел 13 вычисления динамическихпараметров реле, пороговый элемент 8,ключи 3 и 16, алгебраический сумма-тор 17, блок 14 определения потокосцепления, блок 15 Формирования напряжения потокосцепления. Напряжения,пропорциональные магнитному потокуобмотки контролируемого реле и усилию пружины якоря, поступают на узел13, в котором по модели электромагнитного реле вычисляются динамическиепараметры электромагнитного реле,контролируемые блоком 12 регистрации.1541562 Изобретение относится к контроль-но-измерительной технике и можетбыть использовано для контроля динамических параметров (хода, скорости и ускорения) якоря электромагнитных реле в процессе их производства,а также нри проведении регулировочных работ,Цель изобретения - повьппение достоверности контроля.На фиг. 1 изображена схема предлагаемого уст 1 ойства; на фиг. 2 - схема блока определения потокосцепления;на фиг. 3 - схема блока формированиянапряжения нотокосценления; на фиг,4 - схема блока определения параметров модели электромагнитного реле.Устройство содержит блок 1 питания, генератор 2 импульса, первый 20ключ 3, датчик 4 тока, реализованныйна резисторе; усилитель 5, датчик 6усилия пружины якоря электромагнитного реле, усилитель 7, пороговыйэлемент 8, элемент 9 задержки, триггер 10, дифференцирующий элемент 11блок 12 регистрации, узел 13 вычисления динамических параметров реле, содержащий блок 14 определения потоко"сцепления, блок 15 формирования напря жения потокосцепления, второй ключ 16,алгебраический сумматор 17 и блок 18определения параметров изделий электромагнитного реле,Блок 14 содержит блоки 19 и 20 задания коэффициента передачи, блоки21-23 .умножения, сумматоры 24-26,блок 27 деления и блок 28 интегрирования. Блок 15 содержит блоки 29-31умножения, блоки 32 и 33 задания коэффициентов, сумматоры 34 и блок 35 деления,Блок 18 содержит блоки 36 и 37 задания коэффициентов передачи, сумматор38, блоки 39 и 40 интегрирования иблоки 41 и 42 умножения. н ф 1 - ах, Ь-сх где где а =/5;3 К)ц + й 15 и3 кеЙ 1 м3 К 8 Р 45 н 3 ф где Й - магнитное сопротивление железа магнитопровода, 1/Ом с; На фиг, 1 также указаны обмотка 43 контролируемого реле 44 с противодействующей пружиной 45 якоря 46.Датчик 6 предназначен для снятия и преобразования в электрический сигнал изменения усилия противодействующей пружины якоря контролируемого реле. В его качестве возможно использования траверсы механически связан55 ной с движком потенциометра или пьезодатчика, Блоки 14 и 18 позволяют. реализовать алгоритм, полученный в результате исследования математической модели динамических процессов вэлектромагнитном реле: х + Цх + Ггх " 1/2 В г + ВУ А = 98 гК;В, = (11- 3 К)8)г;В - 6 К,8 С 11 цг+ г,1 г 1 гд 4- С 1 г 1 г(4 2г Ц = г/щ;=с /в,где Р - усилие противодействующейИпружины якоря, Н;Ц(С)- напряжение, снимаемое собмотки реле, В,х = х(1); х = ч(С); х = а(Т)ход, м, скорость, м/с, иускорение, м/с, якоря соответственно;- коэффициент, учитывающиймомент сил вязкого (неупругого) сопротивления;ш - масса якоря, кг;с, - жесткость пружины, Н/м;- протокосцепление обмотки,Вс;д - магнитная проводимость потоков рассеяния на единицудлины магнитопровода,Ом с/м;1 - длина магнитной цепи, м;У - число витков обмотки;К - сопротивление обмотки, Ом;5 154гдеЬ - магнитная проницаемостьвоздуха;8 - площадь магнитного потокав зазоре, м;З 8 ф=РЬК 8 + 283где о - начальный рабочий воздушныйзазор, м;1 281 югде 1 - расстояние от оси вращенияоякоря до середины рабочеговоздушного зазора, м.Устройство работает следующим образом.В цепь обмотки 43 контролируемого реле 44 включается датчик 4 тока, противодействующая пружина 45 якоря 46 механически связывается с датчиком 6, При подаче с генератора 2 раз- решающего импульса на запуск устройства с блока 1 питания через ключ 3 подается питающее напряжение. Контролируемое реле начинает срабатывать, через резистор датчика 4 тока протекает ток, пропорциональный. магнитному потоку обмотки. При этом с резистора снимается величина напряжения 0(1)Б О. Это напряжение усиливается в усилителе 5 и поступает в блок 14, вычисляющий величину изменения потокосцепления обмотки, причем до момента движения (трогания) якоря на второй вход блока 14 будет приходить с блока 18 сигнал х(Г.)О. Полученная величина М (Г) преобразуется в блоке 15 в напряжение потокосцепления Б , тождественное напряжению, еснимаемому с обмотки якоря, при этом на второй вход блока 15 до момента движения якоря также будет приходить . с блока 18 сигнал х = О. Сигнал П с блока 15 поступает на информационный вход ключа 16, который закрыт и не пропускает этот сигнал на алгебраический сумматор 17 до момента начала движения якоря, С датчика 6 в начальный момент снимается сигнал П (й) = О. Алгебраический сумматорн17 не вырабатывает разиостный сигнал и, следовательно, блок 18 выдает нулевой сигнал. Одновременно с подачей разрешающего импульса на запуск устройства с генератора 2 импульсов1562 35 40 45 50 55 5 10 15 20 25 30 через дифференцирующий элемент 11 на вход обнуления триггера 1 О приходит сигнал обнуления, устанавливающий триггер 10 в нулевое положение. Начиная с момента движения якоря 46 и до момента его полного останова, противодействующая пружина 45 сжимается и с датчика 6 снимается сигнал изменения усилия противодействующей пружины Р(й). Это усилие в датчике 6 преобразуется в электрический сигнал, а в усилителе 7 он формируется в сигнал необходимой амплитуды нормальной работы узла 13. На выходе усилителя 7 имеется сигнал П (С):- Р, который поступает на алгебраический сумматор 17 через время задержки, равное сумме времен переходных процессов блоков 10 и 16, обусловленное элементом 9 задержки.Сигнал с датчика 6 также одновременно поступает через пороговый элемент 8 на установочный вход триггера 10, переводя его в единичное состояние. Сигнал с выхода триггера 10 поступает на вход управления ключа 16. С этого момента алгебраический сумматор 17 вырабатывает разностный сигнал 6 Б = Б, - П , поступающий в блок 18,1 дфгде происходит его числовая обработка но формуле х+х+ Рх =П - ПЧ Рнтак как якорь электромагнитного реле движется под действием равнодействующей двух сил; силы электромагнитного поля и силы противодействующей пружиИз блока 18 информация о динамических параметрах х ( ), ч ( ), а И ) контролируемого электромагнитного реле поступает в блок 12 регистрации, выдающий результат контроля. Формула изобретения Устройство для контроля параметров якоря электромагнитного реле, содержащее блок питания, первый ключ, датчик тока, генератор импульсов, узел вычисления динамических параметров реле и блок регистрации, выход блока питания подключен к информационному входу первого ключа, выход которого соединен с выводом устройства для подключения одного вывода катушки контролируемого реле, другой вывод для подключения которой соеди 1541562неи с входом датчика тока, выход которого соединен с первым инФормационныи входом узла вычисления динамических параметров реле, выход которогоподключен к информационному входублока регистрации, выход генератораимпульсов соединен с управляющимвходом первого ключа, о т л и ч аю щ е е с я тем, что, с целью повышения достоверности контроля, устройство содержит датчик усилия пружиныякоря электромагнитного реле, пороговый элемент, узел вычисления динамических параметров реле содержитблок определения потокосцепления,блок формирования напряжения нотокосцепления, второй ключ, алгебраический сумматор и блок определения параметров модели электромагнитного реле,выход первого ключа соединен с управляющими входами блока регистрациидатчика усилия пружины якоря электромагнитного реле, выход которого соединен с вторым инФормационным входом узлавычисления динамическихпараметров реле и с входом пороговогоэлемента, выход которого подключен к управляющему входу узла вычислениядинамических параметров реле, который соединен с управляющим входомвторого ключа, выход которого подкжочен к первому входу алгебраическогосумматора, второй вход и выход которого соединены соответственно с вторым инФормационным входом узла вычисления динамических параметров релеи входом блока определения параметров модели, электромагнитного реле,выход которого соединен с выходомузла вычисления динамических параметров реле, первый инФормационный входкоторого подключен к первому входублока определения потокосцепления,выход которого соединен с входомблока Формирования напряжения потокосцепления, выход которого подключенк инФормационному входу второго ключа, выходной разряд контроля перемещения якоря блока определения пара"метров модели электромагнитного релесоединен с вторыми входами блоковопределения потокосцепления и формирования напряжения потокосцепления.1541562Составитель А. Андерс едактор Е. Папп Техред И.Дидыкректор Н. Король Заказ 279 Тираж 65 В Подписное НИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб., д. 4/5оизводственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарин
СмотретьЗаявка
4368610, 22.01.1988
МВТУ ИМ. Н. Э. БАУМАНА
ЕЛАНЦЕВ АЛЕКСЕЙ ВИКТОРОВИЧ, МАРКЕЛОВ ВИКТОР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 23/02
Метки: параметров, реле, электромагнитного, якоря
Опубликовано: 07.02.1990
Код ссылки
<a href="https://patents.su/5-1541562-ustrojjstvo-dlya-kontrolya-parametrov-yakorya-ehlektromagnitnogo-rele.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для контроля параметров якоря электромагнитного реле</a>
Устройство для многопараметрового электромагнитного контроля физико-механических параметров металлических изделий (его варианты)

Номер патента: 934352
Опубликовано: 07.06.1982
Авторы: Анисимов, Балакина, Светашев
МПК: G01N 27/90
Метки: варианты, его, металлических, многопараметрового, параметров, физико-механических, электромагнитного
...в широкомдиапазоне значений (фиг.2), содержитсоединенные последовательно генератор 11 многомерного сигнала, блок 12преобразователей, блок 13 усилителейсигнала и блок 14 расщепителей, опорный вход которого соединен с выходом.генератора 11,К выходу блока 14 расщепителейподключены соединенные последовательно блок 15 устанавливаемых коэффициентов, блок 16 суммирующих усилителей, коммутатор 7 и индикатор 18,и соединенные последовательно пороговый блок 19 и блок 20 логической обработки сигнала, выход которого подключен к управляющему входу коммутатора 17,Количество сигнальных каналов вблоке 15 устанавливаемых коэффициентов и в блоке 16 суммирующих усилителей определяется количеством подобластей, на которые делится областьизменения...
Многоканальный аналого-цифровой преобразователь параметров комплексного сигнала

Номер патента: 1390800
Опубликовано: 23.04.1988
Авторы: Апыхтин, Грузнов, Моисеев, Трушин, Юферев
МПК: H03M 1/46
Метки: аналого-цифровой, комплексного, многоканальный, параметров, сигнала
...Г, +Ч;)=А в 1 пРБ (С =Т/2) =А; я дп (2 й Сз + Ч;:-А; в 1 п Ч эТ ЗТа в моменты=-, С = - каждого такта4420квадратурной составляющей1); (с =-)=А 1 я 1 п(2 ййс +Ч;)=А;сов Ч1)(С =) =Ая 1 п(2 ЙТ + ) =-А;совф 4Таким образом, за цикл развертывающего преобразования (Т ) осуществляется кодирование и запись ортогональных составляющих в каждом канале.Т. =, = Т и 1,Ти1, 30ми сгде Т - период измеряемого сигнала;Б в максимальн значение амМа 1 ССплитуды измеряемого сигнала; 35ЬО - шаг квантования;/ш=-"- - число тактов преобразования.а ссЦРежим измерения амплитуды комплексного сигнала. На управляющемвходе Б - уровень логического нуля.Опорный сигнал Б , - меандр, имеющийчастоту измеряемого сигнала. Опорныйсигнал 1)- меандр, имеющий частоту Йс, котоРая...
Электромагнитный преобразователь параметров движения
Номер патента: 920525
Опубликовано: 15.04.1982
Авторы: Ждановских, Муфазалов, Садков, Садкова
МПК: G01P 3/52
Метки: движения, параметров, электромагнитный
...кольцами Ю вокруг проводников 2 и 3, ослабляются от начала к концу проводника по мере ответвления тока в высокоомную резистивную пластину, Закон убывания индукции магнитного поля по длине про- и водника имеет линейный характер,так как ток в проводнике 2 убывает по линейному закону. Величина тока, от 5 фветвляющегося в резистивную пластйну,постоянна на единицу длины вдольвсей пластины. На выходе проводника,весь ток собирается с пластины, В идостигает своего входного значенияб, Для того, чтобы увеличить магнитный поток, охватывающий проводники, укладывается несколько секции,соедиНенных между собой последовательно и образующих соленоидную об"мотку, вытянутую в поперецном направлении (слева направо) и .имеющую вэтом же направлении линейно...
Устройство для определения параметров передаточной функции линейного динамического объекта
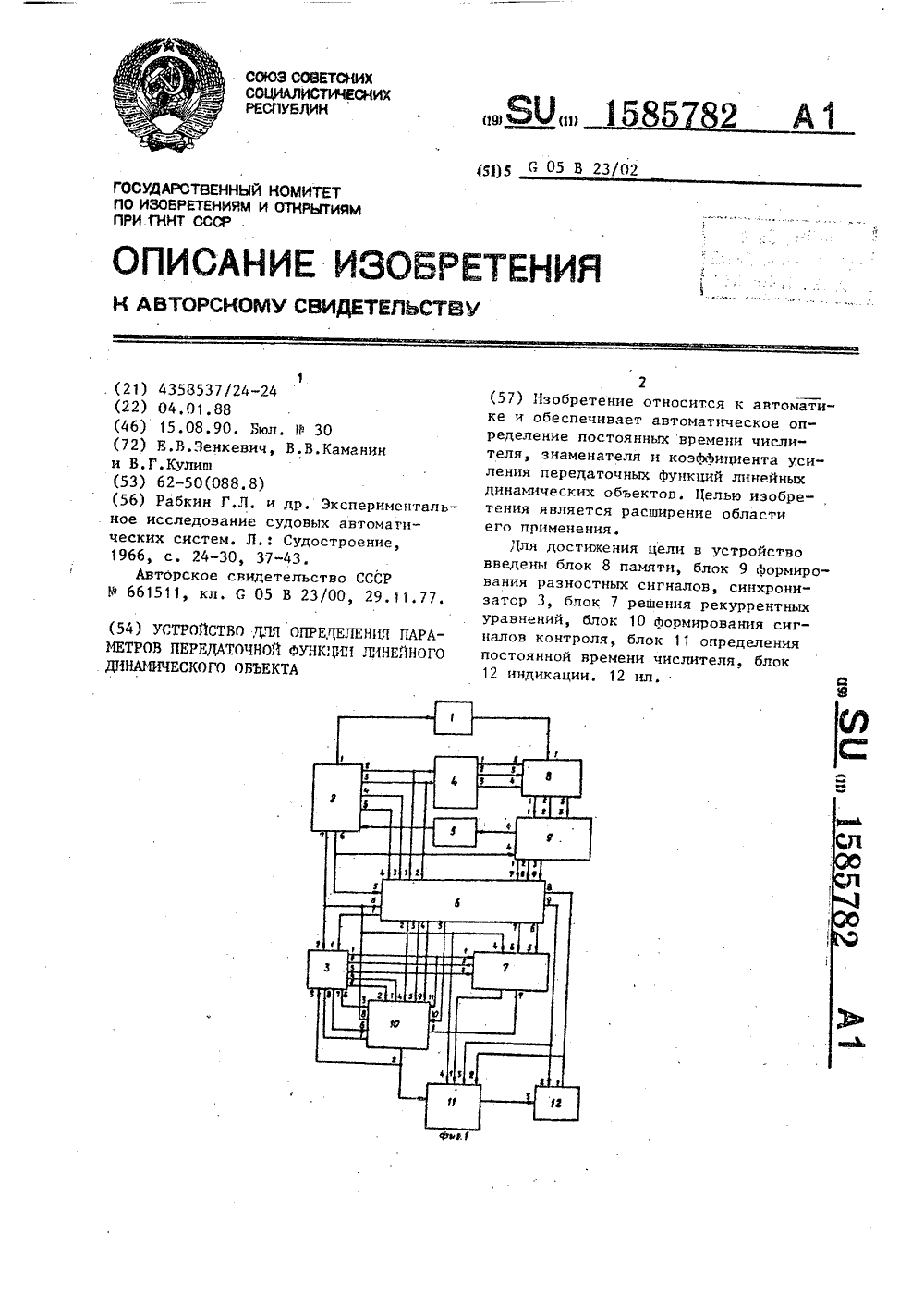
Номер патента: 1585782
Опубликовано: 15.08.1990
Авторы: Зенкевич, Каманин, Кулиш
МПК: G05B 23/02
Метки: динамического, линейного, объекта, параметров, передаточной, функции
...реле, у которых первый управляющий вход соединен с четвертымвходом блока 18 ключей,Вычислитель 6 состоит из семианалого-цифровых преобразователей65-71, блока 64 местного управления,пяти блоков 72-76 деления, двух блоков 77 и 78 вычитания, блока 79 логарифмирования, блока 80 умножения, 25двух блоков 81 и 82 сложения, блока83 возведения в степень, Блок 64 местного управления служит для управления работой всехарифметических блоков вычислителя б и представляет собой кольцевой счетчик, а арифметические блоки 72-83 являются блокамиуниверсального типа, у которых результат записывается и хранится в выходном регистре после выполнения операцииеБлок 7 решения рекуррентных уравнений состоит из блока 19 вычисленияквадратного корня, двух...
Способ формирования сигнала для подстройки параметров регулятора в системе автоматического регулирования
Номер патента: 543920
Опубликовано: 25.01.1977
Авторы: Вербицкий, Диденко, Емельянов, Загарий, Костылева, Левочко, Уланов, Уткин, Шрамко, Шубладзе
МПК: G05B 13/02
Метки: параметров, подстройки, регулятора, сигнала, системе, формирования
...дать физическэе пэяснение эффективности испэльзования предлагаемого спэсэба на примере коррекции эбщегэ коэффициента усиления регулятора, когда желаемые переходные прэцессы - прэцессы на границе колеба543920 процессэв,Сэставитель Э, МитрошинТехред О, Луговая Кэрректор Б. Югас Редактор А, Бер Заказ 1 037/6 3 Тираж 1095 Подписное ЦНИИПИ Государственнэгэ комитета Совета Министров СССР по делам изобретений и открытий 113035, Мэсква, Ж, Раушская набд, 4/5Филиал ППП "Патентф, г, Ужгород, ул, Проектная, 4 тельности, Например, сигнал сравнениясравнивается с нулем, вес сигнала производной в нем ,цэстаточнэ мал, а величина релейного сигнала пропорциональнамодулю сигнала прэизвэднэй-. Тогда сигналэм для настрэйки может служить,например...
Предыдущий патент: Способ оценки результатов измерения
Следующий патент: Устройство для управления потоками жидкости
Случайный патент: Способ подгонки массы поршня