Аналого-цифровая следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
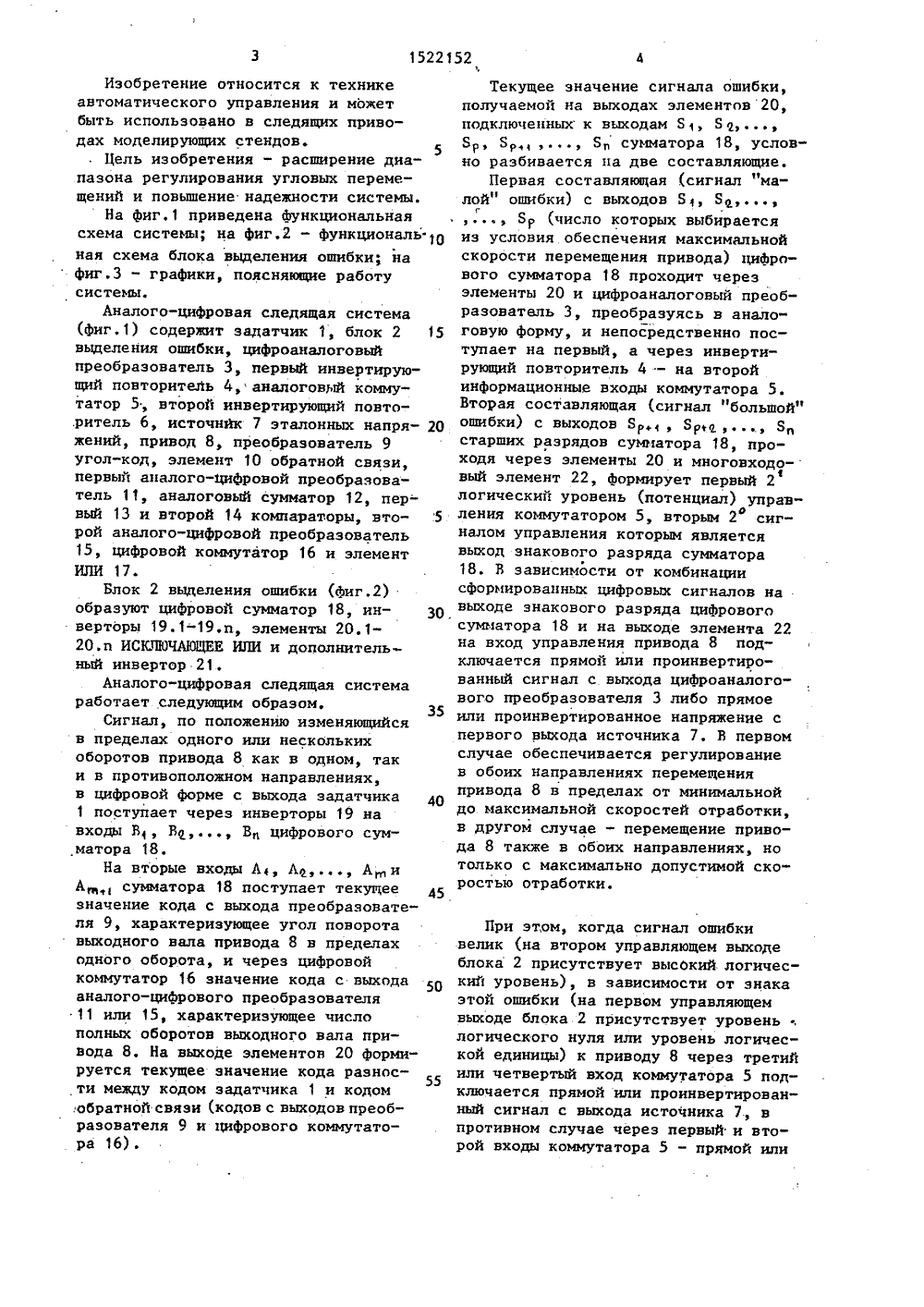
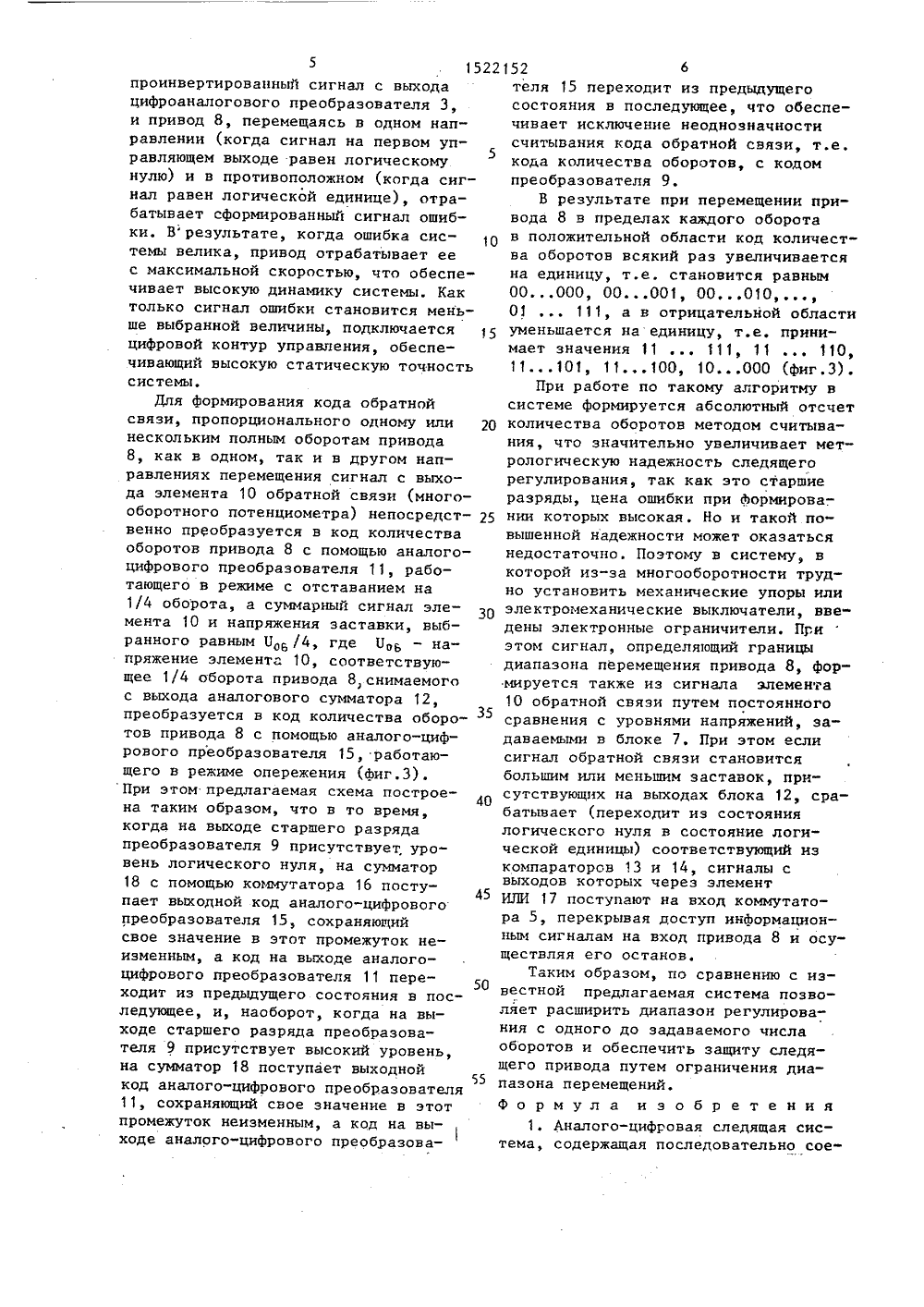
(21) 43788 (22) 15.02 (46) 15.11 (72) Д.И.М (53) 62-50 (56) Автор У 557351,У 42В.С.Чистяк етельство ССС В 13/02, 1977 0-ЦИФР АЯ СЛЕДЯ 111 АЯ СИСя к автомажет быть риводах мо- изобретеа регулирои повышени Эу ИЛИ 17кому лению и спол елир ГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМПРИ ГКНТ СССР ОПИСАНИЕН АВТОРСКОМУ СВИ 7 Изобретение относит ьзовано в следящих ующих стендов. Цель- расширение диапазо я угловых перемещенийнадежности системы. Аналого-цифроваяследящая система содержит задатчик 1,блок 2 выделения ошибки, цифроаналоговый преобразователь 3, первый инвертирующий повторитель 4, аналоговыйкоммутатор 5, второй инвертирующийповторитель 6, источник 7 эталонныхнапряжений, привод 8, преобразователь 9 угол-код, элемент 10 обратнойсвязи, первый аналого-цифровой преобразователь 11, сумматор 12, первый13 и второй 14 компараторы, второйаналого-цифровой преобразователь 1цифровой коммутатор 16, элементЦель изобретения достигается за счетвведения элементов и блоков 4"7, 11,13-17. 1 з.п. ф-лыу 3 ил.Изобретение относится к технике автоматического управления и может быть использовано в следящих приводах моделирующих стендов. 5Цель изобретения - расширение диапазона регулирования угловых перемещений и повьппение надежности системы.На фиг.1 приведена функциональная схема системы; на фиг.2 - функциональ 10 ная схема блока выделения ошибки; на фиг.З - графики, поясняющие работу системы.Аналого-цифровая следящая система (Фиг.1) содержит задатчик 1, блок 2 15 выделения ошибки, цифроаналоговый преобразователь 3, первый инвертирующий повторитель 4, аналоговый коммутатор 5, второй инвертирующий повто.ритель 6, источнйк 7 эталонных напря жений, привод 8, преобразователь 9 угол-код, элемент 10 обратной связи, первый аналого-цифровой преобразователь 11, аналоговый сумматор 12, первый 13 и второй 14 компараторы, вто рой аналого-цифровой преобразователь 15, цифровой коммутатор 16 и элемент ИЛИ 17.Блок 2 выделения ошибки (фиг.2) образуют цифровой сумматор 18, ин верторы 19.1-19,п, элементы 20,1- 20.п ИСКЛЮЧАЮЩЕЕ ИЛИ и дополнительный инвертор 21.Аналого-цифровая следящая система работает следующим образом.35Сигнал, по положению изменяющийся в пределах одного или нескольких оборотов привода 8 как в одном, так и в противоположном направлениях, в цифровой форме с выхода задатчика 40 1 поступает через инверторы 19 на входы В, В В цифрового сумматора 18На вторые входы А, А А и А суьщатора 18 поступает текущее 45 значение кода с выхода преобразователя 9, характеризующее угол поворота выходного вала привода 8 в пределах одного оборота, и через цифровой коммутатор 16 значение кода с выхода аналого-цифрового преобразователя 11 или 15, характеризующее число полных оборотов выходного вала привода 8. На выходе элементов 20 формируется текущее значение кода разности между кодом эадатчика 1 и кодом ,обратной связи (кодов с выходов преобразователя 9 и цифрового коммутато" ра 16). Текущее значение сигнала ошибки, получаемой иа выходах элементов 20, подключенных к выходам Б, Б Бр. Бр.ь Бп сумматора 18, условно разбивается па две составляющие.Первая составляющая (сигнал "малой" ошибки) с выходов Б 1, ББр (число которых выбирается из условия обеспечения максимальной скорости перемещения привода) цифрового сумматора 18 проходит через элементы 20 и цифроаналоговый преобразователь 3, преобразуясь в аналоговую форму, и непосредственно поступает на первый, а через инвертирующий повторитель 4 "- на второй информационные входы коммутатора 5Вторая составляющая (сигнал "большой" ошибки) с выходов Бр,1, Бра у., Бо старших разрядов сумматора 18, проходя через элементы 20 и многовходовый элемент 22, формирует первый 21 логический уровень (потенциал) управления коммутатором 5, вторым 2 сигналом управления которым является выход знакового разряда сумматора 18. В зависимости от комбинации сформированных цифровых сигналов на выходе знакового разряда цифрового сумматора 18 и на выходе элемента 22 на вход управления привода 8 подключается прямой или проинвертированный сигнал с выхода цифроаналогового преобразователя 3 либо прямое или проинвертированное напряжение с первого выхода источника 7. В первом случае обеспечивается регулирование в обоих направлениях перемещения привода 8 в пределах от минимальной до максимальной скоростей отработки, в другом случае - перемещение привода 8 также в обоих направлениях, но только с максимально допустимой скоростью отработки. При этом, когда сигнал ошибки велик (на втором управляющем выходе блока 2 присутствует высокий,логический уровень), в зависимости от знака этой ошибки (на первом управляющем выходе блока 2 присутствует уровень ; логического нуля или уровень логической единицы) к приводу 8 через третий или четвертый вход коммутатора 5 подключается прямой или проинвертированный сигнал с выхода источника 7, в противном случае через первый и второй входы коммутатора 5 - прямой или5 1522 проинвертированный сигнал с выхода цифроаналогового преобразователя 3, и привод 8, перемещаясь в одном направлении (когда сигнал на первом управляющем выходе равен логическому5 нулю) и в противоположном (когда сигнал равен логической единице), отрабатывает сформированный сигнал ошибки. В результате, когда ошибка системы велика, привод отрабатывает ее с максимальной скоростью, что обеспечивает высокую динамику системы. Как только сигнал ошибки становится меньше выбранной величины, подключается 15 цифровой контур управления, обеспечивающий высокую статическую точность системы.Для формирования кода обратной связи, пропорционального одному или 20 нескольким полным оборотам привода 8, как в одном, так и в другом направлениях перемещения сигнал с выхода элемента 10 обратной связи (много- оборотного потенциометра) непосредст венно преобразуется в код количества оборотов привода 8 с помощью аналогоцифрового преобразователя 11, работающего в режиме с отставанием на 1/4 оборота, а суммарный сигнал элемента 10 и напряжения заставки, выбранного равным П Б /4, где Боь - напряжение элемента 10, соответствующее 1/4 оборота привода 8, снимаемого с выхода аналогового сумматора 12, преобразуется в код количества оборотов привода 8 с помощью аналого-цифрового преобразователя 15, работающего в режиме опережения (фиг.З). При этом предлагаемая схема построена таким образом, что в то время, когда на выходе старшего разряда преобразователя 9 присутствует уровень логического нуля, на сумматор 18 с помощью коммутатора 16 поступает выходной код аналого-цифрового преобразователя 15, сохраняющий свое значение в этот промежуток неизменным, а код на выходе аналогоцифрового преобразователя 11 переходит из предыдущего состояния в последующее, и, наоборот, когда на выходе старшего разряда преобразователя 9 присутствует высокий уровень, на сумматор 18 поступает выходной55 код аналого-цифрового преобразователя 11, сохраняющий свое значение в этот промежуток неизменным а код на вы 9ходе аналого-цифрового преобразова 152 6теля 15 переходит из предыдущегосостояния в последующее, что обеспечивает исключение неоднозначностисчитывания кода обратной связи, т.е.кода количества оборотов, с кодомпреобразователя 9.В результате при перемещении привода 8 в пределах каждого оборотав положительной области код количества оборотов всякий раз увеличиваетсяна единицу, т.е. становится равным00000, 00001, 0001001111, а в отрицательной областиуменьшается на единицу, т.е. принимает значения 11111, 11110,11101, 11 100, 10000 (фиг .3) .При работе по такому алгоритму всистеме формируется абсолютный отсчетколичества оборотов методом считывания, что значительно увеличивает метрологическую надежность следящегорегулирования, так как это старшиеразряды, цена ошибки при формировании которых высокая. Но и такой повышенной надежности может оказатьсянедостаточно. Поэтому в систему, вкоторой из-за многооборотности трудно установить механические упоры илиэлектромеханические выключатели, введены электронные ограничители. Приэтом сигнал, определяющий границыдиапазона перемещения привода 8, формируется также из сигнала элемента10 обратной связи путем постоянногосравнения с уровнями напряжений, задаваемыми в блоке 7, При этом еслисигнал обратной связи становитсябольшим или меньшим заставок, присутствующих на выходах блока 12, срабатывает (переходит из состояниялогического нуля в состояние логической единицы) соответствующий изкомпараторсв 13 и 14, сигналы свыходов которых через элементИЛИ 17 поступают на вход коммутатора 5, перекрывая доступ информационным сигналам на вход привода 8 и осуществляя его останов,Таким образом, по сравнению с известной предлагаемая система позволяет расширить диапазон регулирования с одного до задаваемого числаоборотов и обеспечить защиту следящего привода путем ограничения диапазона перемещений,Формула и з обр етения1, Аналого-цифровая следящая система, содержащая последовательно сое 1522152диненные задатчик, блок выделения ошибки и цифроаналоговый преобразователь, к второму входу блока выделения ошибки через преобразователь угол-код подключен первый выход привода, второй выход которого через элемент обратной связи соединен с первым входом аналогового сумматора, о т л и ч а ю щ а я с я тем, что, сцелью расширения диапазона регулирования угловых перемещений и повышения надежности системы, введены первый и второй инвертирующие повторители, аналоговый и цифровой ком мутаторы, первый и второй аналогоцифровые преобразователи, первый и второй компараторы, элемент ИЛИ и источник эталонных напряжений, вы,ход цифроаналогового преобразова О теля подключен к первому информационному входу аналогового коммутатора . и через первый инвертирующий пов- Ю торитель к второму информационному входу аналогового коммутатора, соеди ненного третьим информационным входом с первым выходом источника эталонных напряжений, который соединен через второй инвертирующий повторитель с четвертым информационным входом аналогового коммутатора, подключенного первым и вторым управляющими входами к второму и третьему выходам блока выделения ошибки, входом разрешения - к выходу элемента ИЛИ, а выходом - к входу привода, выход элемента обратной связи соединен с первыми входами первого и второго компараторов и через первый аналогоцифровой преобразователь с первыминформационным входом цифрового ком- Г мутатора, к второму информационномувходу .которого через второй аналогоцифровой преобразователь подключен выход аналогового сумматора, соединенного вторым входом с вторым выходом источника эталонных напряжений,третий и четвертый выходы которогоподключены к вторым входам соответственно первого и второго компараторов, соединенных выходами с входами элемента ИЛИ, управляющий входцифрового коммутатора подключен квыходу старшего разряда преобразователя угол-код, а выход - к третьемувходу блока выделения ошибки. 2. Система по п.1, о т л и ч а - ю щ а я с я тем, что блок выделения ошибки содержит цифровой сумматор, инверторы в количестве, равном числу разрядов цифрового сумматора, дополнительный инвертор, элементы ИСКЛЮЧАЮЩЕЕ ИЛИ в количестве, равном числу разрядов цифррвого сумматора, и элемент ИЛИ, первый вход блока выделения ошибки через инверторы соединен. с первой группой входов цифрового сумматора, вторая группа входов которого является вторым входом блока выделения ошибки, а выход знакового разряда цифрового сумматора цодключен к его входу переноса, второму выходу блока выделения ошибки и через дополнительный инвертор к первым входам элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, соединенным вторыми входами с выходами цифрового сумматора, выходы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, подключенные к выходам младших разрядов цифрового сумматора, являются первым выходом блока выделения ошибки, а выходы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, соединенные с выходами старших разрядов цифрового сумматора, через элемент ИЛИ подключены к третьему выходу блока выделения ошибки.
СмотретьЗаявка
4378810, 15.02.1988
ПРЕДПРИЯТИЕ ПЯ В-2942
МЕЛЬНИК ДМИТРИЙ ИВАНОВИЧ, ЧИСТЯКОВ ВЯЧЕСЛАВ СЕРГЕЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: аналого-цифровая, следящая
Опубликовано: 15.11.1989
Код ссылки
<a href="https://patents.su/5-1522152-analogo-cifrovaya-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Аналого-цифровая следящая система</a>
Преобразователь цифровой код-временной интервал

Номер патента: 482893
Опубликовано: 30.08.1975
Авторы: Мазуренко, Покровский
МПК: H03K 13/20
Метки: интервал, код-временной, цифровой
...счетчика 24 соединены с входами схемы 25 сопадения, другие входы которой подключены к разрядным выходам регистра 26, храпящего преобразуемый код. Выход схемы 25 совпадения соединен с входом регулируемой липин задержки 27.Преобрязоатель работает следующим образом.Генератор 1 квацту 1 ощсй последовательности совместно с сскццонироанной линией зя. деря(ки 2 формцру 1 от ня своих ыходах послсдовательностц импульсов, сдвинутые во времени друг относительно друга ня днскрет преобразования. Эти последовательности импульсов, число которых равно числу каналов ВКОднОГО Олока, пост 1 п 1110 т ца перВыс входы соответству 1 ощих схем И 3 - 7.В исходном состоянии схемы преобразователя, в которое она устанавливается импульсом Сброс, ня все схемы И...
Устройство для измерения динамической погрешности аналого цифрового преобразователя линейно-изменяющегося сигнала

Номер патента: 1073713
Опубликовано: 15.02.1984
Авторы: Беда, Володарский, Шумков
МПК: G01R 31/3167
Метки: аналого, динамической, линейно-изменяющегося, погрешности, преобразователя, сигнала, цифрового
...и второй входы которого соединены с выходом блока управления и с входом второго генератора линейно изменяющегося напряжения соответственно, а выход - с входом одновибратора, выход которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с выходом линии задержки, а выход - с входом синхронизации аналого-цифрового преобразователя, аналоговый вход которого соединен с выходом сумматора, а цифровой выход - с первым входом запоминающего устройства, второй вход которого соединен с выходом триггера, а выход - с вторым входом цифрового вычитающего блока.На фиг. 1 представлена структурная схема предлагаемого устройства,на фиг. 2 - временные диаграммы,поясняющие его работу,Устройство содержит первый 1 ивторой 2 разнополярные...
Устройство фазирования регенераторов цифрового сигнала

Номер патента: 786036
Опубликовано: 07.12.1980
МПК: H04L 7/04
Метки: регенераторов, сигнала, фазирования, цифрового
...например, по схеме последовательного кодирования, В зависимости от величины поступающего на его вход напряжения на выходе преобразователя 10 образуется цифровая кодовая последовательность с различнымчередованием нулей и единиц. Эта последовательность с выхода преобразо-,вателя 10 поступает на вход коммутатора 11, выполненного, например, ввиде набора логических ячеек И-ИЛИНЕ,На другие входы коммутатора 11 сразличных выходов генератора 12 поступают последовательности импульсовс постоянной амплитудой и различными частотами следования. При сильнойкорреляции временных искажений кодовая последовательность на входе коммутатора 11 такова, что на выход пропускается импульсная последовательность с максимальной частотой следования, при...
Устройство для регенерации цифрового сигнала с компенсацией межсимвольных искажений

Номер патента: 1172042
Опубликовано: 07.08.1985
Авторы: Киквадзе, Лазарев, Лев, Сирбиладзе, Шевченко
МПК: H04J 3/06
Метки: искажений, компенсацией, межсимвольных, регенерации, сигнала, цифрового
...линией 9 задержки на определенное число тактовых интервалов, определяемое количеством влияющих последующих импульсов, искаженные информационные импульсы поступают на вход сумматора 8. На другой вход этого сумматора поступают в противофазе соответствующие отклики этих импульсов без основного лепестка с выхода фильтра 7 (в качестве которого можно использовать, например, трансверсальный фильтр), после того, как они были зарегистрированы решающим блоком 6, с последующим формированием прямоугольных импульсов на выходе. Правильность работы первого блока 5, компенсации искажений во многом определяется правильностью работы Решающего блока 6 и в частности, вероятностью регистрации единицы вместо нуля, так как именно в этом случае...
Устройство для регенерации цифрового сигнала с компенсацией межсимвольных искажений

Номер патента: 1327301
Опубликовано: 30.07.1987
Автор: Сирбиладзе
МПК: H04J 3/06
Метки: искажений, компенсацией, межсимвольных, регенерации, сигнала, цифрового
...импульса(фиг. 2 б) будет преобладать над уровнем приподнятого порога (П, наПор фиг, 2 б) решающего блока 7, первого блока бкомпенсации искажений, на выходе решающего блока 7 появится нормированный прямоугольный импульс(фиг, 2 в), который далее подается на входы дополнительной линии задержки8 и полосового Фильтра 9. Полосовой фильтр 9 имеет параметры, идентичные параметрам полосового фильтра 3, и поэтому на его выходе отклик будет иметь точно такую же форму, как и на выходе полосового фильтра 3 (фиг, 2 г). Идентичность откликов зависит только от точности подбора параметров элементов двух простых полосовых фильтров 3 и 9. Одновременно с помощью дополнительной линии задержки 12 прямоугольный импульс с выхода решающего блока 7 (фиг, 2 в)...
Предыдущий патент: Пневматический финитный регулятор
Следующий патент: Командоаппарат
Случайный патент: Аппарат для удаления личинок овода из кожи животных