Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
: л 1.я;С3Ленинградский ордена Ленина, ордена Октябрьской Революци ордена Трудового Красного Знамени горный институт" НАБли ,-им. Г. В. Плеханова(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МОДУЛЯИ НАПРАВЛЯЮЩИХ КОСИНУСОВ ВЕКТОРА ГЛАВНОГОПОТОКОСЦЕПЛЕНИЯ В МАШИНАХ ПЕРЕМЕННОГОТОКА 1Изобретение относится к управлениюэлектроцриводами и может быть использовано в системах векторного управлениямашинами переменного тока для получения сигналов, пропорциональных модулюглавного потокосцепления и направляющихкосинусов системы координат с опорнымвектором главного потокосцепления,Известно устройство для измерениямодуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока, содержащее измерительные обмотки, интегрирующие усилители, тригонометрический анализатор,операционные усилители, умножители и .связи между ними 13.15Недостатками его являются низкиенадежность и точность,Известно также устройство для измерения модуля и иацраг,"чюпих косинусовгавектора главного потокосцепления в машинах переменного тока, .содержащее двадатчика Холла, вычислитель модуля, выходкоторого соединен .с первой выходной ши 2ной, первый и второй блоки умножения, регулятор, третий и четвертый блоки умножения, выходы которых соединены с первыми входами соответственно первого и второго интегрирующих усилителей, выходы которых подключены к второй и третьей выходным шинам и соединены с жрвыми входами четвертого и третьего блоков умножения соответственно и с первыми входами первого и второго блоков умножения 21.Недостатками известного устройства являются узкий динамический диапазон и низкая точность.Цель изобретения - расширение динамического диапазона и повышение точности эПоставленная цель достигается том, что, в устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока, содержащее два.датчика Холла, вычислитель модуля, выход которого соединен с первой выходной шиной, первый104числитель 14 квадрата модуля, пропорционально-интегральный (ПИ) регулятор15, вычислитель 16 абсолютного значения седьмой блок 17 умножения, операционные усилителя 18 и 19, блоки 20 и21 деления,Устройство работает следующим образом., Вращающееся поле электрической машины наводит в датчиках Холла 1 и 2 ЭДС,имеющие первые гармоники е=Чосоьме 5 =4 51 п Ч", сдвинутые на У/2 рад,амплитуды которых пропорциональны величине магнитного потока машины. Этисигналы, содержащие высшие гармоники,определяющиеся технической реализациеймашины и источника напряжения переменной частоты (например, ветильного пре.образователя частоты), поступают на входы блоков умножения 4 и 5 и вычислителя 3 модуля. Блоки умножения 4 и 5перемножают входные значения 5со 5 Ч с текущими значениями сов У,ЫпЧ частоты и фазы сигналов на выходах интегрирующих усилителей 10 и 11,1;В силу закона частотного регулированиямашины, модуль главного потокосцепленияЧ 0 постоянен). Разность сигналов блоков перемножения51 п Ч с 05 Ч - сО 5 М 510 Чили со 5 Ч 51 пЧ . 51 и Ч - соя Чв зави%Асимости от порядка чередования фаз) через регулятор 6 и апериодический усилитель 7 попадает на входы третьего ичетвертого блоков 8 и 9 умножения. Приетом регулятор 6 обеспечивает оптимальное качество фазирования, а апериодический усилитель 7 участвует в фильтрациивысших гармоник и формировании динамиНа чертеже представлена схема устройства для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного 0тока,Устройство содержит датчики Холла1 и 2, вычислитель 3 модуля, первый ивторой блоки 4 и 5 умножения, регулятор 6, апериодический усилитель 7, третий; и четвертый блоки 8 и 9, умножения,интегрирующие усилители 10 и 11, пятыйи шестой блоки 12 и 13 умножения, вы второй блоки умножения, регулятор, ср.тий и четвертый блоки умножения, выходы которых соединены с первыми входами соответственно первого и второго интегрирующих усилителей, выходы коорых подключены к второй и третьей выходным шинам и соединены с первыми входами четвертого и третьего блоков умножения соответственно и с первыми входами первого и второго блоков умно О жения, введены первый и второй операционные усилители, апериодический усильтель, вычислитель квадрата модуля, пропорционально-интегральный регулятор, пятый, шестой и седьмой блоки умноже ния и вычислитель абсолютного значения, причем выходы датчиков Холла соедина. ны с входами первого и второго операционных усилителей, выходы которых соединены с,входами вычислителя модуля и 20 с вторыми входами первого и второго блоков умножения, выходы которых соединены с входами регулятора, выходом подключенного через апериодический усили тель к. вторым входам третьего и четвер того блоков умножения, выходы первого и второго интегрирующих усилителей соединены с первыми входами соответственно у.итого и шестого блоков умножения и с входами вычислителя квадрата модуля, 30 выходом соединенного с первым входом пропорционально-интегрального регулято ра, второй вход которого соединен с шиной задания амплитуды, первый вход вычислителя абсолютного значения подключен к вторым входам третьего и четвертого блоков умножения, второй вход - с шиной смещающего напряжения, а выход" с первым входом седьмого блока умножения, второй вход которого соединен с вы ходом пропорционально интегрального- регулятора, а выход подключен к вторым входам пятого и шестого блоков умножения, выходы которых соединены соответственно с вторыми входами первого и второго интегрирующих усилителей Сигнал, поступающий с апериодического усилителя 7 на шину регулирования частоты своей абсолютной величиной определяет коэффициент усиления в контуре, образованном блоком 8 умножения, инте.- грирующим усилителем 10, блоком 9 умножения и интегрирующим усилителем 11, и частоту генерируемых колебаний, а поляр.ность сигнала на шине регулирования частоты определяет последовательность чередования фаз двухфазной системы выходных сигналов. Сигналы с интегрирующих усилителей 10 и 11 поступают на входы вычислителя 14 квадрата модуля, а с его выхода на вход ПИ регулятора 15 настроенного по оптимальному качеству стабилизации для данного уровня амплитудылиал ППП фПатент Проектная,иго 7 9743етзертого блоков умножения, выходы первого и второго интегрирующих усилителей соединены с первыми входами соответственно жтого и шестого блоков умножения и с входами вычислителя квад рата модуля, выходом соединенного с Гзжым входом пропорпиональноинтеграль ф Бого регулятора, второй вход которого соединен с шиной задания амплитуды, первый вход вычислителя абсолютного эна.10 чения подключен к вторым входам третьего и четвертого, блоков умножения, второй входс шиной смещающего напряжения, а выходс первым входом седьмого блока умножеВНИИПИ Заказ 869 10 8ния, второй вход которого соединен с выходом пропорционально-интегрального регулятора, а выход подключен к вторым,входам пятого и шестого блоков умноже-,ния, выходы которых соединены соответственно с вторыми входами первого ивторого интегрирующих усилителей.Источники информапии,принятые во внимание при экспертизе1, Авторское свидетельство СССРМ 767034, кл. С 01 Я 33/02, 14.06.761 4.06.76,2. Патент фРУ % 2019283,кл. С, 01 й 33/02, 1976. Тираж 717 Подписно
СмотретьЗаявка
3252501, 25.02.1981
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА, ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОРНЫЙ ИНСТИТУТ ИМ. Г. В. ПЛЕХАНОВА
АЛЕКСЕЕВ ВАСИЛИЙ ВАСИЛЬЕВИЧ, ДАРТАУ ВИТОЛЬД АЛЕКСАНДРОВИЧ, ПАВЛОВ ЮРИЙ ПАВЛОВИЧ, РУДАКОВ ВИКТОР ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G01R 33/02
Метки: вектора, главного, косинусов, машинах, модуля, направляющих, переменного, потокосцепления
Опубликовано: 15.11.1982
Код ссылки
<a href="https://patents.su/4-974310-ustrojjstvo-dlya-izmereniya-modulya-i-napravlyayushhikh-kosinusov-vektora-glavnogo-potokoscepleniya-v-mashinakh-peremennogo-toka.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для измерения модуля и направляющих косинусов вектора главного потокосцепления в машинах переменного тока</a>
Устройство для умножения чисел по модулю
Номер патента: 1615714
Опубликовано: 23.12.1990
Авторы: Ирхин, Краснобаев, Чарковский, Чигасов
МПК: G06F 7/72
Метки: модулю, умножения, чисел
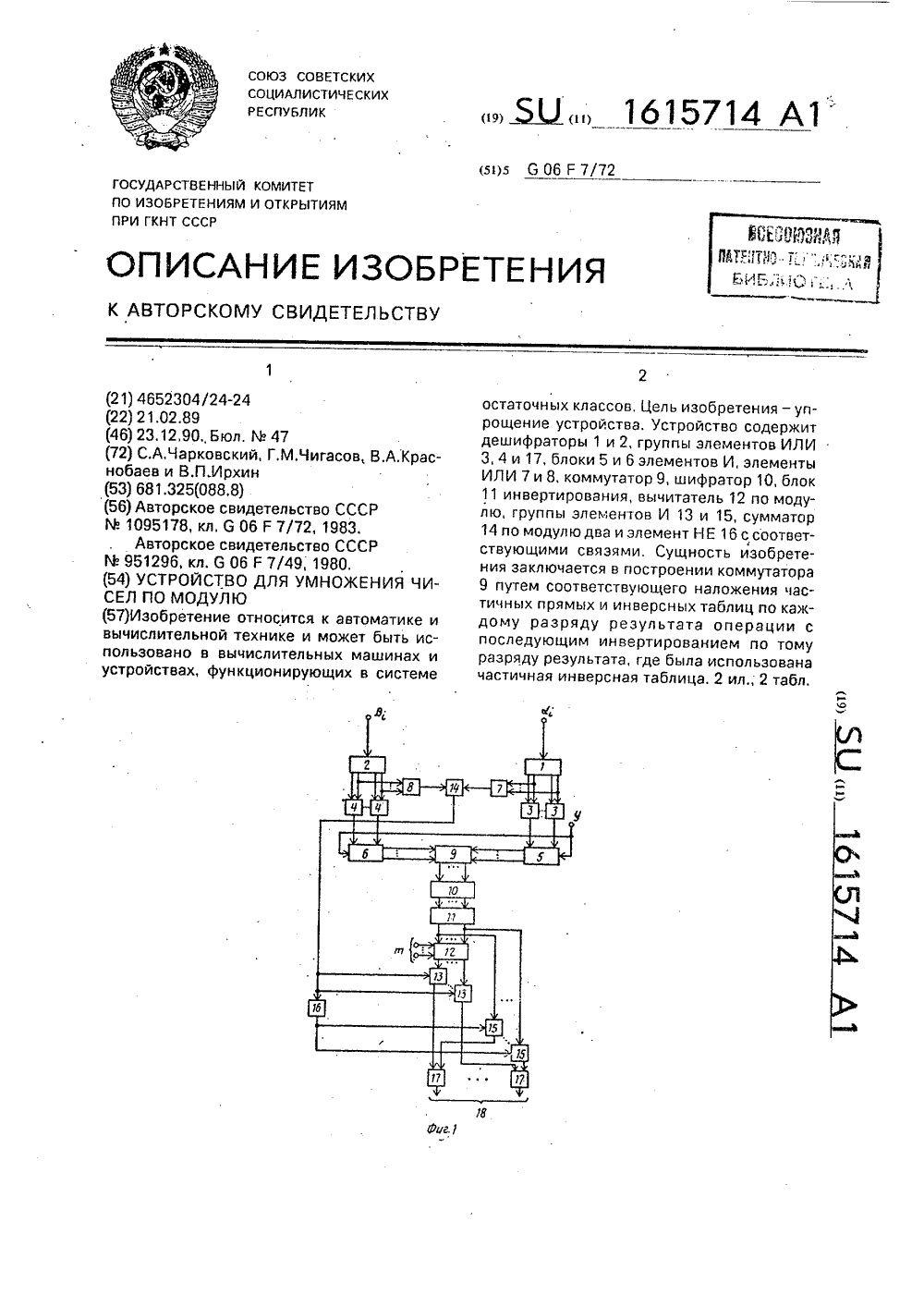
...умножения в двоичном коде.Рассмотрим пример конкретного выполнения операции модульного умножения для гп = 11. В этом случае количество элементов ИЛИ в шифраторе 10 равно четырем, Пронумеруем их слева направо от трех до нуля, Используем инвертированную таблицу по второму разряду результата операции. В этом случае блок 11 инвертирования состоит из одного элемента НЕ. Выходы остальных элементов ИЛИ шифратора 10 подключены прямо к входам соответствующих разрядов входа вычитаемого вычитателя 12 по модулю. Составим табл, 1, в элементе которой над чертой находится значение результата операции, а под чертой - номера элементов ИЛИ шифратора 10, на входы которых поступает сигнал с соответствующего элемента И коммутатора 9,Табл, 1 составлена...
Устройство для монтажа блок-модулей судовых помещений

Номер патента: 1008072
Опубликовано: 30.03.1983
Авторы: Акулов, Волобуев, Мицкевич, Фалеев
МПК: B63B 15/00
Метки: блок-модулей, монтажа, помещений, судовых
...блок- модулей 6 при достижении ими точного конечного положения,Монтаж блок-модулей судовых помещений на 111-м и 11-м ярусах жилой надстройки осуществляют следующим образом.По завершении формирования в цехе основной части 11 надстройки судна на ее палубах 111-го и 11-го ярусов устанавливают и приваривают направляющие 4. К стойкам 12 наружной стенки 13 надстройки 9 закрепляют ограничительные упоры-демпферы 14, изготовленные, например, из резины.При помощи мостового крана или посредством перемещения по специально проложенным поперечным рельсам 3 устанавливают монтажную эстакаду 1, центруют ее с соответствующей парой горизонтальных направляющих 4 на настиле палубы 111-го яруса и при необходимости временно соединяют с основной частью 11...
Устройство для верхнего крепления блок-модулей в корпусе судна

Номер патента: 1402484
Опубликовано: 15.06.1988
Авторы: Акулов, Волобуев, Гацук, Михеев
МПК: B63B 9/06
Метки: блок-модулей, верхнего, корпусе, крепления, судна
...над шарниром 4 прикреплен уфор 11. В соответствии с количестством смежных блок-модулей 12, подлежащих креплению, к втулке 5 прикреплено необходимое количество кронштей 35 нов 3 .и упоров 11.Работа устройства по формированию надстройки судна осуществляется следУющим образом,Производят монтаж каркаса из кор пусных конструкций 7, на которые затем устанавливают устройства для крепления блок-модулей 12, Устройства для нижнего крепления первого яруса устанавливают в рабочее положение, вводя опоры 1 в проемы ячеек корпусных конструкций 7. Все остальные устройства устанавливают в нерабочее положение, т,е их кронштейны 3 поворачивают с втулками 5 до вывода ик из проемов ячеек каркаса. На уст 50 ройства для нижнего крепления первого яруса,...
Устройство для контроля рн и концентрации газов крови

Номер патента: 1586681
Опубликовано: 23.08.1990
МПК: G01N 33/49, G01N 33/84
Метки: газов, концентрации, крови
...а в ячейку Яь Вслед за этим МП 13 вычитает содержимое ЙТ из содержимого % и, если разница больше нуля (т,е, В;КТ), то это означает, что температура блока 1меньше заданной, поскольку с увеличением температуры сопротивление стекла падает, В этом случае МП 13 через Порт ВВ 22 подает управляющий сигнал через первый вход БУ 11 на первый вход блока 10 контроля температуры, а через него на нагревательный элемент 5 подается питание,МП 13 по программе запускает таймер 23 на задержку в 1 с и по окончании задержки цикл работы повторяется пока измеренное текущее значение сопротивления не жим предварительной насгройки (он должен проводиться после каждой сменытретьего преобразователя 4 или периодически через каждый месяц работы) и, еслипосле этого...
Устройство для умножения чисел по модулю
Номер патента: 976440
Опубликовано: 23.11.1982
Авторы: Королев, Краснобаев
МПК: G06F 7/49
Метки: модулю, умножения, чисел
...числа Х и У заданы по основанию Р в виде табличного умножения х=( 31 х), у=(я ,у ), то для того, чтобы получить произведение этих чисел по модулю Р, достаточно получить произведение ху(пад Р) в коде табличного умножения и инвертировать его индекс в случае, если "Х отлично от Ь Р;-)0 если 0",ЗХ 1 если Р+" сх Р2При реализации операции модульного умножения возможны два основных способа введения знака:- представление чисел в искусственной Форме, т. е. А =А+Р/2- введение знака в явном виде, т.е,.сопровождать число А признакомЯего знака з 1 дп А.Условимся, что, если А Ъ О, то Я А= =О, а если А О, то Я.А=1. В первом способе диапазон ГО, Р) представимых чисел А уменьшается в два раза, так Ркак числа, лежащие в интервале 0, - -1), обозначают...
Предыдущий патент: Вибрационный магнитометр
Следующий патент: Устройство для измерения магнитной индукции
Случайный патент: Флюс для сварки титана и его сплавов