Устройство для автоматической балансировки роторов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 864033
Автор: Моржаков




Текст
2) Автор изобретения С, П, М в 7) Заявите эЬ 54) УСТРОЙСТВО ДЛ Я АВТОМАТИЧРОТОРОВ ЭАЛА НСИРОВК тягается тем,последовательноместа воздействия Изобретение относится к станкостроению и может быть использовано в устройствах для автоматической балансировки роторов.Известно устройство для автоматической балансировки роторов, содержащее последовательно соединенные датчик дисбаланса, блок определения параметров дисбаланса, блок управления и исполнительный орган, например лазер. Устройство предназначено для балансировки в процессе вращения ротора 1 16Недостатком устройства является огра ниченная точность балансировки, связанная с угловыми погрешностями коррекций дисбаланса, из-за различного запаздывания лазерЯых импульсов. 15Наиболее близким по технической сущности к предлагаемому является устройство для автоматической балансировки роторов в процессе их вращения, содержащее датчик дисбаланса и связанный с ним Ю усилитель, последовательно соединенные датчик опорного сигнала, блок определения параметров дисбаланса, блок управ 2ления и исполнительный орган, а также формирователь импульсов, соединенный входом с выходом блока определения параметров дисбаланса, второй вход которого связан с выходом усилителя. Выход формирователя импульсов связан со вторым входом блока управления, а в качестве исполнительного органа применен лазер ЬНедостатком данного устройства является то, что ошибка по фазе между действительным углом дисбаланса нв роторе и местом воздействия исполнительного органа (лазера) обнаруживается не сразу, а после коррекции некоторого количества материала. Это привощтт к удалению с ротора лишнего материала, ухудшению поверхности ротора и снижению точности балансировки.Бель изобретения - повышение точнос ти балансировки.Поставленная цель досчто устройство снабженосоединенными датчиком864033 исполнительного органа, вторым блокомопрепеления параметров дисбаланса, вторым формирователем импульсов, переключателем и схемой логического умножения,выхоа которой связан со вторым вхоцом5блока управления, второй вхоц второгоблока опрепеления параметров цисбаланса связан с выходом усилителя, а выходпервого формирователя импульсов связансо вторыми вхопами схемы логическогоОумножения и переключателя.На чертеже привецена блок-схемаустройства,Устройство цля автоматической балансировки роторов соцержит датчик 1 писбаланса и связанный с ним усилитель 2, послецовательно соединенные датчик 3 опорного сигнала, блок 4 определения парамет-ров дисбаланса, блок 5 управления и исполнительный орган 6, например лазер, а такгоже формирователь 7 импульсов, соециненный вхоцом с выхоцом блока 4 определения параметров цисбаланса, которой вхопкоторого связан с выхоцом усилителя 2,послеповательно соецинепные цатчик 825места возцействия исполнительного органа6, второй блок 9 определения параметровписбаланса, второй формирователь 10 импульсов, переключатель 11 и схема 12лоГъческого умножения, выход которойсвязан со вторым вхоцом блока 5 управления, второй вхоц второго блока 9 опрежления параметров дисбаланса связан свыхоцом усилителя 2, а выход формирователя 7 импульсов связан со вторымивхоцами схемы 12 логического умножения и перекщочателя 11,Блоки 4 и 9 опрепеления параметровдисбаланса выполнены идентичными исодержат кажный соединенные вхоцамицва синхронных детектора 13 и 14, фазоврашатель 15 и механически связанный с ним привод 16, формирователь17 ортогональных гармонических напряжений и измеритель 18, попключенный квыходу синхронного детектора 13, выхопы формирователя 17 ортогональныхгармонических напряжений связаны с выхоцами фазоврашателя 15, выходы последнего - со вторыми входами синхронныхцеректоров 13 и 14, а выход синхронного 5 Оцетектора 14 соецинен с входом привода16, а вход формирователя 17 ортогональных напряжений, первый и второй входыи выход синхронного детектора 13 образуют соответственно первый и второйвходы, первый и второй выходы блоков4 и 9 определения параметров дисбаланса. 4При работе устройства напряжение с патчика 1 писбаланса через усилитель 2 поступает на входы синхронных цетекторов 13 и 14 блоков 4 и 9 опрепеления параметров цисбаланса. Сигнал, поступающий с выхоца цатчика 3 опорного сигнала, преобразуется формирователем 17 в пва ортогональных гармонических напряжения, которые питают фазоврацатель 15 блока 4 определения параметров дисбаланса. При наличии цисбаланса балансируемого ротора 19 привод 16 отрабатывает указанный фазоврашатель 15 цо тех пор, пока напряжение на выходе синхронного петектора не станет равным нулю, Напряжение на выходе синхронного детектора 13 равен максимальному и инпицируется измерителем 18, а фаза опорного напряжения с фазоврашателя 15 и напряжения сигнала дисбаланса совпа дают.Таким образом, пля синхронизации работы исполнительного органа 6 используется напряжение фазоврашателя 15, блока 4 определения параметров дисбаланса, поступающее на синхронный детектор 13, а его выходное напряжение опрецеляет время включения состояния исполни тельного органа 6. Исполнительный орган 6, например лазер, уцаляет с поверхности ротора материал, а место на которое воздействует исполнительный орган нагревается. Тепловое излучение воспринимает датчик 8 места воздействия исполнительного органа 6, чувствительный к инфракрасному излучению и формирует импульс, фаза ,которого по отношению сигнала дисбаланса и опорного сигнала, определяется погрешностью работы исполнительного органа 6. Указанный импульс поцается на вход блока 9 опрепеления параметров дисбаланса, гце из. него формируется синусоицальный и косинусоицальный сигналы формирователем 17. С выхода фазоврашателя 15 синусоицальные сигналы, сдвинутые по фазе на 90, поступают на два синхронных цетектора 13 и 14. Привоц 16 фазоврашателя 15 отрабатывает его до тех пор, пока на выходе синхронного детектора 14 напряжение не станет равным нулю. При этом на выходе синхронного детектора 13 напряжение равно максимуму. Сигнал с фазоврашателя 15 поступает на второй формирователь импульсов, импульсы котороГ о могут быть попключены ко вхопу схемы 12 логического умножения переключателем 11. Управляющий сигнал на исполнительный орган 6 передается только в том случае, когца сигналы на входах схемы8640 12 логического умножения совпадают по фазе. Совпадение фазы этих сигналов имеет место только тогда, когда исполнительный орган 6 удаляет материал без угловых погрешностей, Наличие ошибки приводит к сдвигу по фазе импульсов, поступающих на схему 12 логического умно жения, и исполнительный орган 6 прекра-, щает работу.Введение в предлагаемое устройство последовательно соединенных датчика места воздействия испоаительного органа, второго блока определения параметров дисбаланса, второго формирователя импульсов, переключателя и схемы логического умножения позволят повысить точность балансировки за счет устранения угловой погрешности, вызванной несовпадением момента генерации лазера с положением тяжелого места ротора. В данном устройстве достижима угловая погрешность менее одного углового градуса, так как она определяется погрешностью регулировки датчика места обработки ротора и может быть уменьшена в процессе настройки устройства Формула изобретения Устройство для автоматической балансировки роторов в процессе их вращения 33 6содержашее датчик дисбаланса и связанныйс ним усилитеа, последовательно соединенные датчик опорногг сигнала, блокопределения параметров дисбаланса, блокуправления и исполнительный орган, атакже формирователь импульсов, соединенный входом с выходом блока определенияпараметров дисбаланса, второй вход которого связан с выходом усилителя, о тл и ч а ю ш е е с я тем, что, с цеи,юйовышения точности балансировки, оноснабжено последовательно соединеннымидатчиком места воздействия испоаюитежного органа, вторым блоком определенияпараметров дисбаланса, вторым формирователем импульсов, переключателем и схемой логического умножения, выход которойсвязан со вторым входом блока управюния второй вход второго блока определзния параметров дисбаланса связан с выходом усилителя, а выход первого формирователя импульсов связан со вторымивходами схемы логического умножения ипереключателя.Источники информации,принятые во внимание при экспертизе1. Патент СССР М 424371,кл. Я 01 М 1/38, 1 971,2. Авторское свидетельство СССРМ 347609, кл. 6 01 М 1/38, 1971864033 Составитель П. Техред Л.Пекарь А. Долин ктор М, Демчик ППП Патент, г. Ужгород, ул. Проектн Заказ 7761/59 ВНИИПИ Гос по делам 1130.35, МТираж 9 10 П однисноедарственного комитета СССР обретений и открытий ва, Ж 35, Раушская наб., д. 4
СмотретьЗаявка
2862179, 27.12.1979
ВОЕННЫЙ ИНЖЕНЕРНЫЙ КРАСНОЗНАМЕННЫЙ ИНСТИТУТ ИМ. А. Ф. МОЖАЙСКОГО
МОРЖАКОВ СЕРГЕЙ ПЕТРОВИЧ
МПК / Метки
МПК: G01M 1/38
Метки: автоматической, балансировки, роторов
Опубликовано: 15.09.1981
Код ссылки
<a href="https://patents.su/4-864033-ustrojjstvo-dlya-avtomaticheskojj-balansirovki-rotorov.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для автоматической балансировки роторов</a>
Устройство для измерения параметров импульсов давления топлива в дизеле
Номер патента: 1247712
Опубликовано: 30.07.1986
МПК: G01M 15/00
Метки: давления, дизеле, импульсов, параметров, топлива
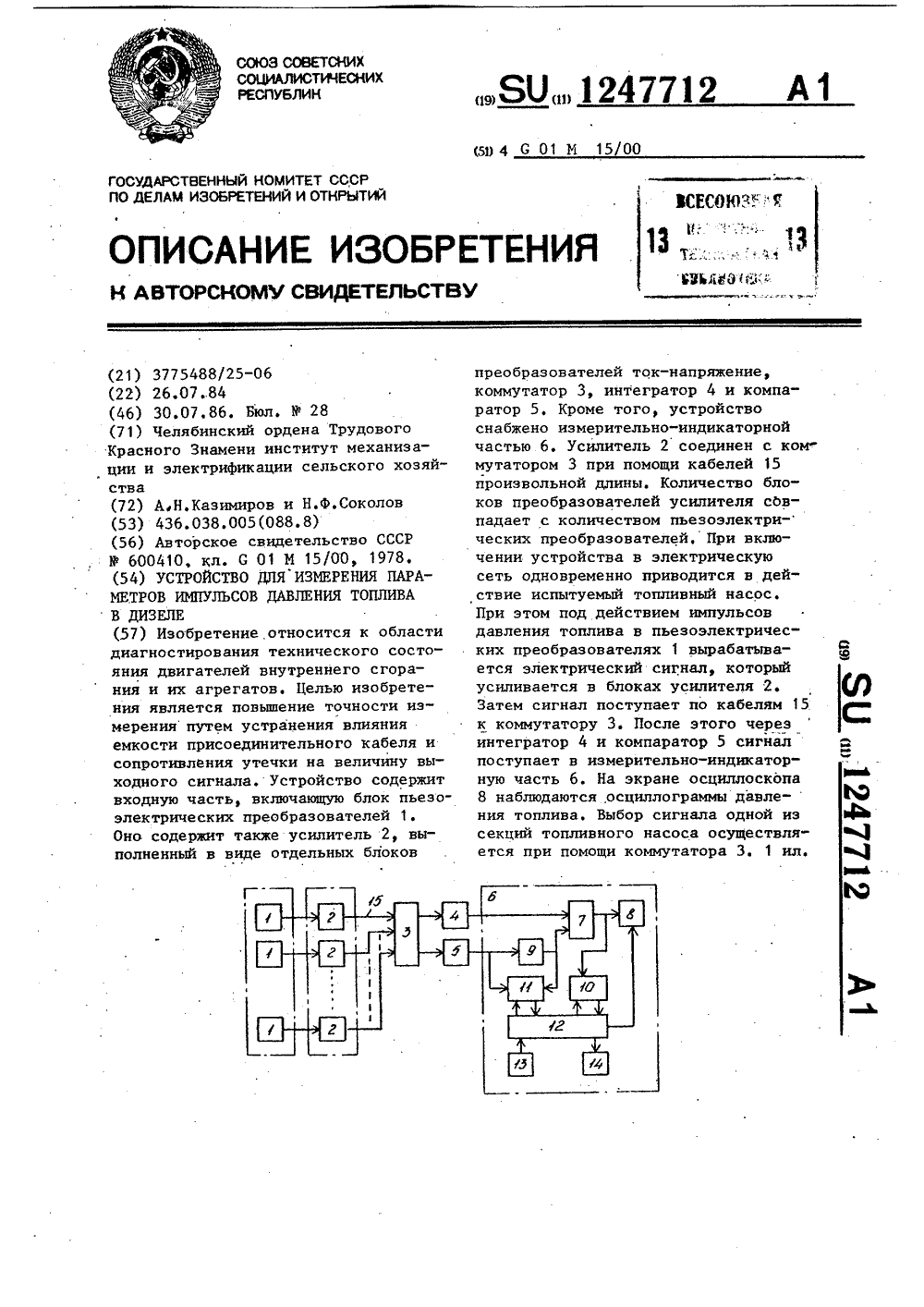
...с коммутатором 3 при помощи кабелей 15 произвольной длины.Устройство работает следующим образом.Устанавливают в разрывах топливо- проводов пьезоэлектрические преобразователи 1 давления и присоединяют .к ним блоки усилителя 2. К выходам 12Изобретение относится к диагностированию технического состояния двигателей внутреннего сгорания и их агрегатов, в частности к устройствам измерения параметров импульсов давления топлива в топливной системе дизеля.Целью изобретения является повышение точности измерения путем устранения влияния емкости присоедини- тельного кабеля и сопротивления утечки на величину выходного сигнала.На чертеже представлена блок-схема устройства.Устройство для измерения параметров импульсов давления топлива в дизеле...
Цифровой измеритель временных параметров импульсов

Номер патента: 1018103
Опубликовано: 15.05.1983
Автор: Коржов
МПК: G04F 10/04
Метки: временных, измеритель, импульсов, параметров, цифровой
...через инвертор подключенк первым входам третьего и четвертого элементов И-НЕ и ко вторым входампервого элемента И-НЕ и первогоэлемента совпадения, третий входпервого элемента И-НЕ соединен с выходом второго элемента И-НЕ и вторымвходом третьего элемента И-НЕ, выходкоторого соединен со вторыми входамивторого и четвертого элементов И-НЕ,третий вход второго элемента И-НЕподключен к первому выходу первогоэлемента И-НЕ, вторыевходы второгои третьего элементов совпадения подключены соответственно ко второмувыходу первого элемента И-НЕ и к выходу четвертого элемента И-НЕ. На фиг.1 изображена структурнаясхема предлагаемого цифрового анализатора временных параметров импульсов; на фиг.2 - временные диаграммыего работы.Схема содержит блоки 1 и 2...
Способ определения параметров импульса нейтронов, генерируемых бустером

Номер патента: 1646400
Опубликовано: 30.06.1992
Авторы: Ананьев, Воронов, Гундорин, Денисов, Квасников, Константинов, Куликов, Матора, Погодаев, Попов
МПК: G01T 3/00
Метки: бустером, генерируемых, импульса, нейтронов, параметров
...цердлцоактивпый 1, ттрвраглет в рапи- . (Иа(тнвцыт Изотоп ( И с полунериодом3331распттда 121, 271 дней. Полученные в реэульт(ттс этого измерения значения плотности излучецця укаэанных и "линий домцожают ца известные стиошения выхода терццньгк нейтронов на электрон 1 а лс лщ.мся материале стерж. ней активной эоны и ма гериале штатной мипеци бустера к вьходу цейтронов на естественном вольфраме (например, длл ИБР-ЗО с его плутониевыми стержнями АЗ и мцтпенью из естественного вольфрама первый цэ указанных множителей составляет л 3, а множитель для мишени равен 1). Тем самым полученное распрел(тление будет пропорциональным действительному распрсг 1 елению плотности генерации первиццьо( нейтронов в бустере,ИыГор в качестве нераэмцожающего...
Способ измерения параметров импульса ионизирующего излучения
Номер патента: 1281011
Опубликовано: 27.01.2000
Авторы: Вайсбурд, Семин, Серобян
МПК: G01T 1/10
Метки: излучения, импульса, ионизирующего, параметров
Способ измерения параметров импульса ионизирующего излучения, включающий преобразование его рабочим веществом в световое излучение и его регистрацию, отличающийся тем, что, с целью увеличения временного разрешения измерений и интервала амплитуд измеряемых импульсов, в качестве рабочего вещества используют диэлектрик, нагревают его выше температуры тушения всех температурозависимых свечений, например, примесной и экситонной люминесценции, и регистрируют импульс внутризонной высокоэнергетической люминесценции диэлектрика под действием ионизирующего излучения, измеряют зависимость амплитуды импульса внутризонной высокоэнергетической люминесценции от амплитуды импульса ионизирующего излучения,...
Картоконтрольное устройство для таксофонов

Номер патента: 1202072
Опубликовано: 30.12.1985
Авторы: Алешин, Буторлин, Васильев, Горохов, Губренко, Кучумов
МПК: H04M 17/02
Метки: картоконтрольное, таксофонов
...электромагнит 5 находится в нерабочем, а блок 1 в рабочем состоянии, и происходит первая фаза контроля кредитной карты. Первая фаза контроля состоит в проверке неразрушенного информационного слоя карты, которая осуществляется соответствующей цепью контроля, образуемой в блоке 1 с помощью переключающих контактов (ие показаны) электромагнита 5 в его нерабочем состоянии. В случае соответствия параметров неразрушенного информационного слоя карты заданным парамет 50 55 В результате срабатывания блока 8 и воздействия его исполнительного элемента иа информационный слой карты происходит разрушение последнего, Одновременно своим замыкающим контактом 10 электромагнит 5 шунтирует разговорный блок 3, исключая - до получения положительных...
Предыдущий патент: Разделитель давлений
Следующий патент: Способ определения в изделиях входа течей, сквозные каналы которых заполнены рабочей жидкостью
Случайный патент: Вогсонэзная im ена