Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
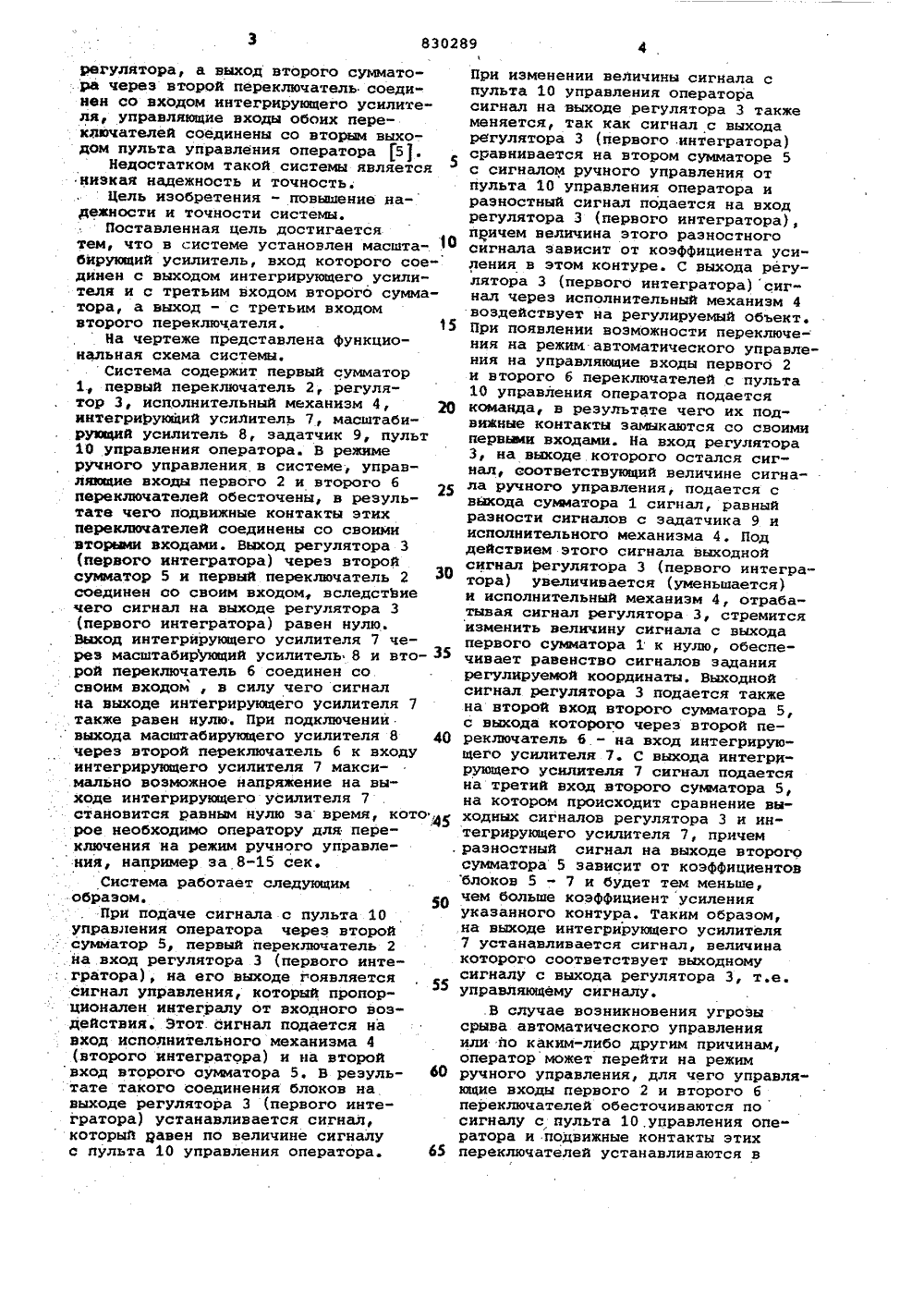
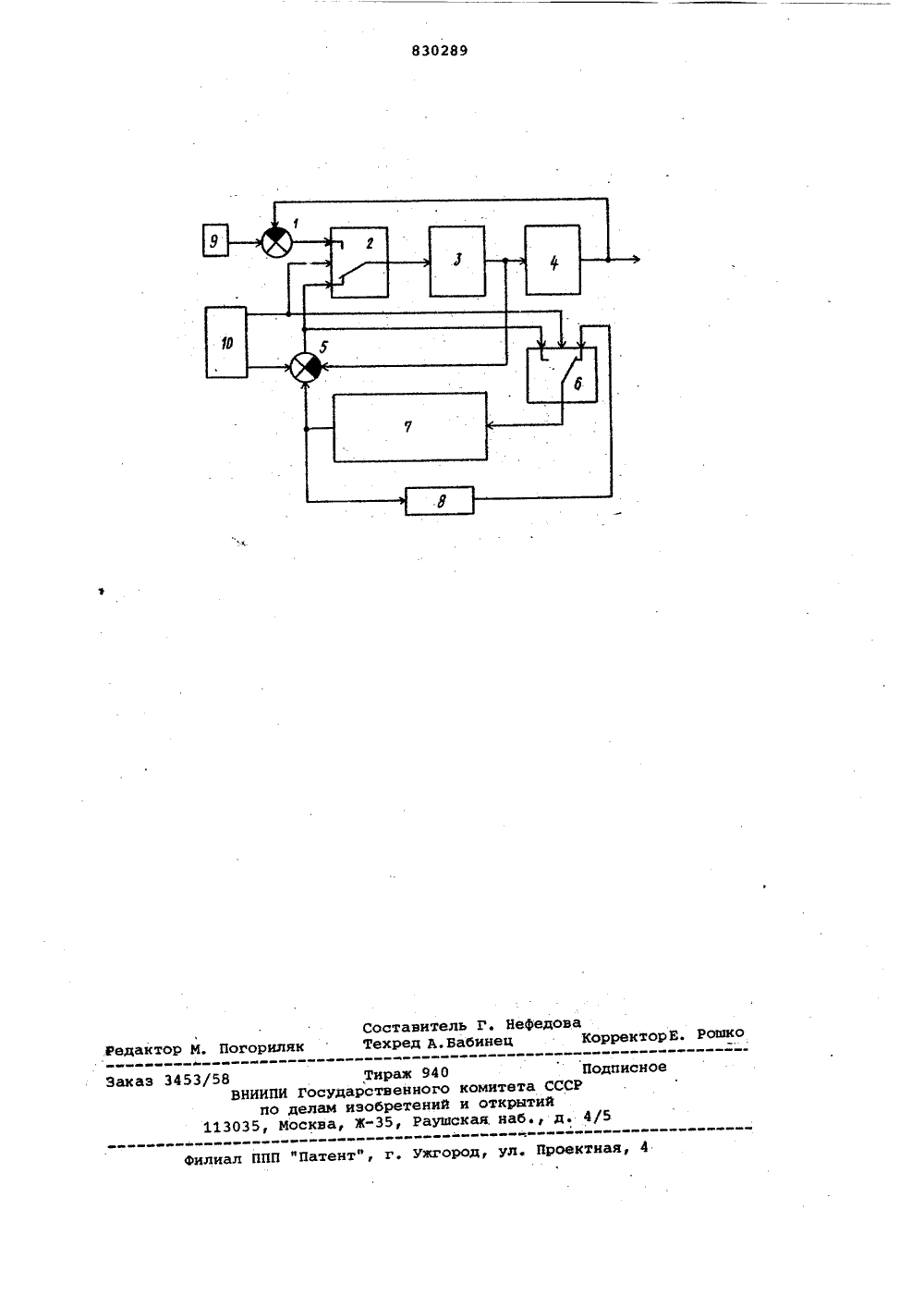
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено 170879 (21) 2813876/1-24 (51)М. КЛ. Союз Советских Социалистических Республикс присоединением заявки Йо С 05 В 7/00 Государственный комитет СССР ао дедам изобретений и открытийДата опубликования описания 1505 В 1(72) Авторы изобретения В.И.Гунченков, В.Д,Иванов, А.Г.Пономарев иЙ.О.Рыбалко(54) СИСТЕМА УПРАВЛЕНИЯ Изобретение относится к системам, в которых обеспечиваетсяплавное переключение с автоматического слежения за регулируемямпроцессом на ручное и обратно(с ручного на автоматическое) засчет формирования сигнала управленияпутем сравнения выходного сигналарегулятора с задаваемым сигналомручного управления и может быть использовано для управления объектамиразличного назначения,Известны системы управления,содержащие основной контур управления, состоящий из задатчика, сумматора, переключателя, регулятора иисполнительного механизма, и контурручного управления, содержащий пультуправления оператора, переключательи усилитель-интегратор, в основекоторых лежит принцип фиксации величины сигнала управления в моментпереключения и добавления к немусигнала, соответствующего разностимежду зафиксированным сигналом инеобходимым. выходным (1- (41,Однако в ряде практических случаев при управлении технологичес"кими процессами, появляется необходимость перехода как с ручного на. автоматическое управление, так и обратно, например, когда автоматическому управлению угрожает возможностьсрыва, а оператор, обладая свойством селективности может дискриминировать и парировать возникающиепомеховые ситуации.В этом случае эти системы обладают низкой точностью, так как кэтому моменту команда ручного управления .не подготовлена и.переход савтоматического на ручное управление,в основном, зависитот оператора,его подготовленности, а при регулиро вании некоторых технологических процессов недопустим срыв управленияни при переходе с ручного на автоматическое управление, ни обратно.Наиболее близким по технической 20 сущности к предлагаемой являетсясистема управления, содержащаяпоследовательно соединенные задатчик,первый сумматор, первый переключатель, регулятор и исполнительный ме ханизм, выход которого соединен совторым входом первого сумматора,и пульт управления Оператора, первыйвыход которого соединен с первымвходом второго сумматора, второй 30 вход которого соединен.с выходом83028 регулятора, а выход второго суммато. ра через второй переключатель соединен со входом интегрирующего усилителя, управляющие входы обоих переключателей соединены со вторым выходом пульта управления оператора )5).Недостатком такой системы являетсянизкая надежность и точность.Цель изобретения - повышение надежности и точности системы.Поставленная цель достигаетсятем, что в системе установлен масшта-. 0бирующий усилитель, вход которого соединен с выходом интегрирующего усилителя и с третьим входом второго сумматора, а выход - с третьим входомвторого переключателя. 15На чертеже представлена функциональная схема системы.Система содержит первый сумматор1, первый переключатель 2, регулятор 3, исполнительный механизм 4, ;щинтегриРующий усилитель 7, масштабирующий усилитель 8, задатчик 9, пульт10 управления оператора. В режимеручного управления в системе, управляющие входы первого 2 и второго бпереключателей обесточены, в результате чего подвижные контакты этихпереключателей соединены со своимивторыми входами. Выход регулятора 3(первого интегратора) через второйсумматор 5 и первый переключатель 2 З 0соединен со своим входом, вследствиечего сигнал на выходе регулятора 3(первого интегратора) равен нулю.Выход интегрирующего усилителя 7 через масштабирующий усилитель 8 и вто- З 5рой переключатель б соединен сосвоим входом , в силу чего сигнална выходе интегрирующего усилителя 7также равен нулю. При подключениивыхода масштабирующего усилителя 8 40через второй переключатель б к входуинтегрирующего усилителя 7 максимально возможное напряжение на выходе интегрирующего усилителя 7становится равным нулю за время, кото, 5рое необходимо оператору для переключения на режим ручного управления, например за 8-15 сек,Система работает следующимобразом. 50При подаче сигнала с пульта 10управления оператора через второйсумматор 5, первый переключатель 2.на вход регулятора 3 (первого инте.гратора), на его выходе гоявляетсясигнал управления, который пропорционален интегралу от входного воздействия. Этот. сигнал подается навход исполнительного механизма 4(второго интегратора) и на второйвход второго сумматора 5. В результате такого соединения блоков навыходе регулятора 3 (первого интегратора) устанавливается сигнал,который равен по величине сигналус пульта 10 управления оператора. 65 9 4При изменении величины сигнала с пульта 10 управления оператора сигнал на выходе регулятора 3 также меняется, так как сигнал с выхода регулятора 3 (первого интегратора) сравнивается на втором сумматоре 5 с сигналом ручного управления от пульта 10 управления оператора и раэностный сигнал подается на вход регулятора 3 (первого интегратора), причем величина этого раэностного сигнала зависит от коэффициента усиления в этом контуре. С выхода регулятора 3 (первого интегратора) сигнал через исполнительный механизм 4 воздействует на регулируемый объект. При появлении возможности переключения на режим автоматического управления на управляющие входы первого 2 и второго б переключателей с пульта 10 управления оператора подается команда, в результате чего их подвижные контакты замыкаются со своими первыми входами. На вход регулятора 3, на выходе которого остался сигнал, соответствующий величине сигнала ручного управления, подается с вйхода сумматора 1 сигнал, равный разности сигналов с задатчика 9 и исполнительного механизма 4, Под действием этого сигнала выходной сигнал регулятора 3 (первого интегратора) увеличивается (уменьшается) и исполнительный механизм 4, отрабатывая сигнал регулятора 3, стремится изменить величину сигнала с выхода первого сумматора 1 к нулю, обеспечивает равенство сигналов задания регулируемой координаты. Выходной сигнал регулятора 3 подается также на второй вход второго сумматора 5, с выхода которого через второй переключатель б - на вход интегрирующего усилителя 7. С выхода интегрирующего усилителя 7 сигнал подается на третий вход второго сумматора 5, на котором происходит сравнение выходных сигналов регулятора 3 и интегрирующего усилителя 7, причем раэностный сигнал на выходе второго сумматора 5 зависит от коэффициентов блоков 5 - 7 и будет тем меньше, чем больше коэффициент усиления указанного контура. Таким образом, на выходе интегрирующего усилителя 7 устанавливается сигнал, величина которого соответствует выходному сигналу с выхода регулятора 3, т.е. управляющему сигналу.В случае возникновения угрозы срыва автоматического управления или по каким-либо другим причинам, оператор может перейти на режим ручного управления, для чего управляющие входы первого 2 и второго б переключателей обесточиваются по сигналу с пульта 10,управления оператора и подвижные контакты этих переключателей устанавливаются в35 формула изобретения 25 ЗО 35 40 45 1. АвторскОе свидетельство СССР50 В 391534, кл. 6 05 В 11/28, 1971. 2. Патент СШ В 3940594,опублик. 24.02.74. 3. Авторское свидетельство СССРпо заявке В 2127665/18-24,кл. 6 05 В 11/46, 1975., 4, Патент США В 3662276,кл. 330-1 А, заявл. 02.10.70, опублик.09 0572.5. Патент Японии В 51-20671,60 кя. 54(7) С 141, эаявл. 08.07.70,опублик. 26.06.,76 (прототип), исходное положение. При этом вход регулятора 3 отключается от выхода первого сумматора 1 и подключается к выходу второго сумматора 5, а вход интегрирующего усилителя 7 отключается от выхода сумматора 5 и подключается к выходу масштабирующего усилителя 8. В результате этого переключения с выхода второго сумматора 5 на вход регулятора 3 подается сигнал, равный разности между выходными сигналами регулятора 3 и интегрирующего усилителя 7, который близок к нулю, т.е. величина сигнала на выходе регулятора 3 остается такой же, какой она была в момент переключения, и исполнительный механизм 4 продолжает отрабатывать зацаваемую величину. Одновременно с этим выход интегрирующего усилителя 7 через масштабирующий усилитель 8 и второй переключатель 6 замыкается со своим входом, в результате чего сигнал на выходе интегрирующего усилителя 7 уменьшается со скоростью, определяемой параметрами масштабирующего усилителя 8 и интегрирующего усилителя 7 через второй сумматор 5 оказывает свое влияние на работу исполнительного механизма 4, т.е. второго интегратора 4, что не должно остать.ся незамеченным оператором. Оператор, воздействуя на соответствующие органы пульта 10 управления оператора, парирует падение сигнала на выходе интегрирующего. усилителя 7 и, в случае необходимости, и изменение параметров, например, скорости протекающего процесса. Через определенное, удобное для оператора, время сигнал на выходе интегрирующего усилителя 7 . становится равным нулю, а на выходе пульта 10 управления оператора - равным выходному сигналу регулятора 3, т.е. необходимому для работы исполнительного механизма 4.Таким образом, предлагаемая система регулирования позволяет осуществлять переключение с автоматического на ручное и с ручного на автоматическое управление беэ фскачкаф сигнала управления. Система характеризуется еще одной особенностью, которая заключается в том, что выходной сигналвторого сумматора 5 и режиме автоматического управления инвариантен к нулевому иливообще к сигналу с пульта 10 управления оператора и всегда близок или равен нулю, так как выходной сигнал интегрирующего усилителя 7 в этом режиме равен сумме сигналов с пульта 10 управления оператора и регулято; ра 3. А это значит, что к пульту 10 управления оператора могут предъяв" ляться менее жесткие требования по величине нулевого сигнала, а оператору не обязательно устанавливать в нулевое положение орган управления пульта 10 управления оператора при переходе в режим автоматического управления.Предлагаемая система может найти широкое применение при регулировании различных технологических процессов, особенно при управлении процессами со. скоротечным нелинейным изменением параметров регулирования и работе в условияхдействия помех,Использование предлагаемой .системы повышает тоъность регулирования . в условиях переключения на режим ручного управления в 5-15 раз и тем заметнее, чем выше скорость изменения регулируемой величины. Система управления, содержащая последовательно соединенные задатчик, первый сумматор, первый переключатель, регулятор и исполнительный механизм, выход которого соединен со вторым входом первого сумматора, и пульт управления оператора, первый выход которого соединен с первик входом второго сумматора, второй вход которого соединен с выходом регулятора, а выход второго сумматора через второй переключатель соединен со входом интегрирующего усилителя, унравляющие входы переключателей соединены со вторым выходом пульта управления оператора, о т л ич а ю щ а я с я тем, что, с целью повышения надежности и точности системы, в ней установлен масштабирующий усилитель, вход которого сое-. динен с выходом интегрирующего усилителя и с третьим входом второго сумматора, а выход - с третьимвходом второго переключателя, первыйвход которого соединен с третьим.входом первого переключателя. Источники информации,принятые во внимание при экспертизе кл. 235 - 150,1, эаявл. 13.08.74,830289 Составитель Г. НефедоПогориляк Техред А.Бабинец ректорЕ. Роюко одписно Ужгород, ул. Проектная, 4 иал ПП ат Заказ 3453/58 Тираж ВНИИПИ Государствен по делам изобрет 113035, Москва, Ж, 940 Пого комитета СССРний и открытийаушская, наб., д. 4/5
СмотретьЗаявка
2813876, 17.08.1979
ПРЕДПРИЯТИЕ ПЯ А-1705
ГУНЧЕНКОВ ВСЕВОЛОД ИВАНОВИЧ, ИВАНОВ ВЛАДИМИР ДМИТРИЕВИЧ, ПОНОМАРЕВ АЛЕКСАНДР ГРИГОРЬЕВИЧ, РЫБАЛКО ИВАН ОСТАПОВИЧ
МПК / Метки
МПК: G05B 7/00
Метки:
Опубликовано: 15.05.1981
Код ссылки
<a href="https://patents.su/4-830289-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Цифро-аналоговый регулятор для интегрирующего электропривода

Номер патента: 954928
Опубликовано: 30.08.1982
Автор: Лянзбург
МПК: G05B 11/40
Метки: интегрирующего, регулятор, цифро-аналоговый, электропривода
...многоразрядный цифровой код М, значение которого пропорционально углу поворота выходного вала электропривода. Сумматор 7 осуществляет алгебраическое (с учетом знаков слагаемых) суммирование кодов "17 = 11 + Щ , а вычитатели 5 и 6 выполняют операции Н= М 2 - йиМ 8 соответственно. Все коды поступают как алгебраические величины, т,е. содержат информацию о знаке.Цифро-аналоговый преобразователь 1 преобразует входной. код . 1в напряжение питания электродвигателя 1 1, в ре -." зультате чего начинают поворачиваться , вал электродвигателя 1 1 и через редуктор 12 вал датчика 13 угла, формирующего сигнал обратной связи, который поступает на вход 3 измерения угла.В моменты времени 11, 1, 1 на выходах интегратора 2 все разряды имеют одинаковое...
Многоканальный регулятор

Номер патента: 1100606
Опубликовано: 30.06.1984
Авторы: Гончаров, Слесарев, Черных
МПК: G05B 11/14
Метки: многоканальный, регулятор
...характеристик датчиков 14 их выходные сигналы поступают на входы соответствующих 5 измерительных преобразователей 13 блока 2 измерений и преобразований.На фиг, 4 резисторы 32-35, соединенные в мостовую схему, осуществля.ют компенсацию влияния температуры 10 окружающего воздуха, Усиление выход- ного сигнала датчика 14 осуществляется с помощью операционного усилителя 50, в котором резисторами 36 и 37 устанавливают необходимый коэф фициент усилейия. Линеаризация харак. теристики датчика 14 осуществляется методом кусочно-линейной ап роксимации с помощью операционных усилителей 51 и 52 за счет нелинейной об ратной связи, образованной соответ.ственно диодами 54, 55 и 56, 57. Через резистор 39 на инвертирующий вход операционного усилителя...
Адаптивный регулятор

Номер патента: 1149213
Опубликовано: 07.04.1985
Авторы: Алексеев, Браславский, Жидков, Сафронников, Семенов, Ситников, Федоров, Фурман, Шубин, Шубладзе
МПК: G05B 13/02
Метки: адаптивный, регулятор
...первое и второе множительные устройства,первые входы которых подключены к вы ходу входного сумматора, первый усилитель и интегратор, подключенные входами к выходам соответственно первого и второго множительных устройств, и выходной сумматор,зхо- З 0 ды которого подключены соответственно к выходам .первого усилителя и интегратора, а выход - к входу объекта, Настройка коэффициентов при пропорциональной и интегральной сос З 5 тавляющих закона управления осуществляется на основе обработки информации о реакции системы на пробный сигнал 1.2,гНедостатком известного регулятора 40 является сложность реализации, связанная с используемым способом оценки параметров объекта, предусматривающим наличие генератора пробного сигнала,...
Устройство автоматической коррекции толщины полосы стана горячей прокатки

Номер патента: 774645
Опубликовано: 30.10.1980
Авторы: Гринчук, Кохан, Кутовой, Опрышко, Плус, Полищук
МПК: B21B 37/24
Метки: автоматической, горячей, коррекции, полосы, прокатки, стана, толщины
...того, выход источника 15 питания через нормально-открытый контакт реле 14 наличия металла и последовательно соединенныенормально-закрытые контакты реле 12максимального перемещения и реле17 переключения соединен со вторымвходом интегратора 8, а через нормально-открытый контакт реле 14 наличия металла и ключ 18 ручного отключения канала коррекции по входным возмущениям - с третьим входоминтегратора 8,Работает устройство следующимобразом,В исходном состоянии при отсутствии полосы в клетях отключены реле12,14 и 17. При входе головного конца каждой полосы в первую клеть непрерывной группы появляется сигнал,пропорциональный изменению положениянажимных винтов первой клети, обусловленный отклонением параметров подката. Этот сигнал через...
Трехпозиционный регулятор температуры

Номер патента: 877493
Опубликовано: 30.10.1981
Авторы: Спиридонов, Шершаков
МПК: G05D 23/24
Метки: регулятор, температуры, трехпозиционный
...мост 1 сбалансирован, при этом мульвибратор 13постоянно работает и управляет переключателем 6, который в свою очередь подключает поочередно началомили концом вторичную обмотку 5 об- Щратной связи. При этом условие возникновения генерации в устройствене выполняется и основной и дополнительный релейные усилители 11 и 12находятся в выключенном состоянии,а выпрямитель 8 и элементы И 9 и10. закрыты.Отклонение температуры окружающейсреды от номинального значения изменяет сопротивление датчика 2, чтоприводит к нарушению баланса термо- ЗОчувствительного моста 1. В зависимости от знака разбаланса, т е. повы"шения или понижения температуры, образуется цепь положительной обратнойсвязи при подключении вторичной об- З 5мотки 5 обратной связи...
Предыдущий патент: Устройство для привода шаговогодвигателя электрочасов
Следующий патент: Устройство для стабилизации соот-ношений выходных величин двухдвигатель-ных электроприводов
Случайный патент: 415348