Способ автоматического управленияпроцессом пластикации при литье поддавлением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
Совэ СоаетскикСоциалистическихРеспублик ОП ИСАКИИ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ои 823159(51) М., Кл, В 29 Г /00 С 05 О 27/00 с присоединением заявки Лв ГееудеретееиеыР квинтет ССОР ао делам ваебретеикй к отермткР(53) УДКбб.012- -52(088,8) Дата опубликования описания 10.05.81(54) СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПЛАСТИКАЦИИ ПРИ ЛИТЬЕ ПОД ДАВЛЕНИЕМИзооретение относится к автоматизации процессов переработки пластмасс и может быть использовано при проведении процессов переработки пластмасс под давлением,Известен способ автоматического управления процессом пластикации при литье под давлением путем измерения текущего осевого положения . червяка относительно его упора в сопло, сравнения указанного осево" го положения червяка в предыдущем цикле работы литьевой машины с за" данным положением червяка в момент окончания процесса впрыска и выработке сигнала коррекцииНедостатками известного способа управления являются наличие колебательного характера процесса коррекции и длительность процесса входа в режим работы. Кроме того, измерение "подушки" связано с определенными техническими трудностями, Возникает необходимость точно определять момент окончания впрыска, чтобы с достаточной точностью узнать величину"подушки". Поэтому все известные устройства содержат блок определенияокончания впрыска.Величина "подушки" при малых порциях впрыскиваемого материала можетбыть мала и ее точное измерение связано с повышением чувствительностиизмерительных блоков, Точность стабилизации дозы зависит от точностизамера "подушки" и определения знакаи величины коррекции. Все это снижаетточность стабилизации величины объемной дозы материала.Цель изобретения - повышение точности стабилизации величины объемнойдозы материала.Поставленная цель достигаетсятем, что согласно способу управления 20процессом пластиФикации при литье поддавлением путем измерения текущегоосевого положения червяка относитель-.но его. упора в сопло, дополнительно823159 измеряют величину пути, пройденногочервяком во время процессов впрыскаматериала и его формования, формируютсигнал, соответствующий величине объемной дозы материала суммированиемсигнала, соответствующего измеренному,пути червяка при впрыске и Формовании, с сигналом, соответствующимпредварительно заданному положениючервяка в конце процесса формования,и прекращают операцию пластикациипри совпадении сигналов, соответствующих величине объемной дозы материала и текущего осевого положениячервяка, причем нри нулевом значениисигнала, соответствующего положениючервяка при впрыске и Формовании, увеличивают сигнал, соответствующий величине объемной дозы материала, навеличину, обратно пропорциональную величине измеренного пути червяка привнрыске и формовании,На чертеже показана блок-схема системы автоматического управления процессом нластикации питьевых машин,реализующая предлагаемый способ,Способ автоматического управленияпроцессом пластикации ири литье поддавлением осуществляют следующим.образом,Пластикацию расплава материала осу-. ществляют вращением червяка 1 посредством привода 2. При этом расплав материала скапливается в передней части материального цилиндра 3 и отодвигает червяк 1 от сопла (на чертеже слева направо). Пластикация материала осуществляется до достижения червяком 1 определенного положения, при котором объем накопленного перед червяком 1 расплава материала соответствует объему отливаемого изделия. После окончания всех подготовительных операций (закрытие формы, подвод мс ханизма впрыска и др) поступает команда на впрыск расплава в форму, который осуществляется при помощи гидроцилиндра 3, управляемого блоком 4 управления. После заполнения рас- плавом формыпоступает команда на формование, при котором изделие выдерживается под давлением Формирования определенное время, Измерение текущего осевого положение червяка 1 относительно его упора в сопло осуществляется с помощью датчика 5 и блока 6 текущего осевого положения червяка 1, которое входит в состав вычислительного устройства системы. 4Блок 6 текущего осевого положениячервяка 1 накапливает сигналы датчика 5, Измерение пути, пройденногочервяком 1 во время процесса впрыска и формования, осуществляется спомощью блока 7 измерения пути привпрыске и формировании аналогичногоблоку 6, но он управляется блоком4 управления; сигнал с выхода блока 10 7 поступает на вход сумматора 8, надругой вход которого подается сигнал от задатчика 9 положения червяка 1 в момент окончания процессаФормования. На выходе сумматора 8 15 формируется сигнал, соответствующий объемной дозе материала:(1+1) =,ь Ь +япгде 5 (1+1) - необходимая в следующем цикле объем ная доза расплаваматериала;- объем впрыскиваемогоЬ 4в форму материала вовремя впрыска и формирования;заданный объем остатка материала в конце формирования ("подушка")Таким образом, после первого впры. ска становится известной величинадозы расплава. Сигнал, соответствующий этой величине является как быэталонным и подается на вход сравнивающего блока 10 сравнения. Э 5Вслед за процессом формования наступает процесс пластикации. Блок бтекущего положения червяка измеряетположение червяка 1 при перемещенииего от сопла к бункеру. Этот сигнал 40поступает на вход блока 10 сравненияКогда сигнал с выхода блока 6 текущего положения червяка совпадает ссигналом с выхода сумматора 8, блок10 сравнения подает сигнал на останов привода 2 вращения червяка. Если во время впрыска или формованиячервяк 1 достиг упора в сопло и сигнал, соответствующий текущему осевому положению червяка 1, равен нулю,то на выходе датчика 11 нулевого осевого положения червяка появляетсясигнал, который отпирает блок 12 увеличения дозы расплава. На вход блока12 поступает сигнал с выхода блока 7измерения пути при впрыске и формировании. Сигнал с выхода блока 10 поступает на один из входов сумматора,8.823159 Формула изобретения 5В этом случае необходимая в последующем цикле доза расплава материалаопределяется по формулеба",(1+1) = ь + Ъъад+ Агде А - величина, обратно пропорциональная величине сигнала,соответствующего измеренному пути при впрыске и формованиид К приор ФО;. ОА= М при 811= О,где К - коэффициент пропорциональности, задаваемый оператором или программистом;5 - максимально возможная до зза расплава материала,Таким .образом, чем больше величина измеренного пути червяка при впрыске и формовании, тем меньше величинасигнала на выходе блока 12. В резуль Отате этой прибавки система быстреевходит в режим. но его упора в сопло, о т л и ч а ю -щ и й с я тем, что, с целью повышения точности стабилизации величиныобъемной дозы материала, измеряют величину пути пройденного червяком вовремя процессов впрыска материала иего формования, формируют сигнал, соответствующий величине объемной дозыматериала суммированием сигнала, соответствующего измеренному пути червяка при впрыске и формовании, с сигналом, соответствующим предварительнозаданному положениючервяка в концепроцесса формования, и прекращают операцию пластикации при совпадении сигналов, соответствующих величине объемной дозы материала и текущего осевого положения червяка, причем при нулевом значении сигнала, соответствующего положению червяка при впрыске иформовании, увеличивают сигнал, соответствующий величине объемной дозы материала, иа величину, обратно пропорциональную величине измеренного путичервяка при впрыске и формовании.Способ автоматического управления процессом пластикации при литье под дав.давлением путем измерения текущего осевого положения червяка относительИсточники информации,принятые во внимание при экспертизе 1. Патент США В 3666141, кл. 2221, опублик. 1965,823159 Составитель Л.АлександровРедактор С;Патрушева ТехредМ,Коштура: Корректор Л.Ива Подписи ак Филиал ППП "Патент", г, Ужгород, ул. Проектная, 4 1966/19 Ти ВНИИПИ Государ по делам из 113035, Москвааж 694венного комитета СС ретений и открытий Ж, Раушская наб.
СмотретьЗаявка
2743283, 23.03.1979
УКРАИНСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙИНСТИТУТ CTAHKOB И ИНСТРУМЕНТОВ
ШЕВЧЕНКО БОРИС ПЕТРОВИЧ, КРИЧЕВЕР ИЛЬЯ САМСОНОВИЧ, НИКОЛЕНКО ТАТЬЯНА ПАВЛОВНА, ФАЕРМАН ДАВИД САМУИЛОВИЧ, КРИЧЕВЕР АЛЕКСАНДР ИЛЬИЧ
МПК / Метки
МПК: B29F 1/00
Метки: литье, пластикации, поддавлением, управленияпроцессом
Опубликовано: 23.04.1981
Код ссылки
<a href="https://patents.su/4-823159-sposob-avtomaticheskogo-upravleniyaprocessom-plastikacii-pri-lite-poddavleniem.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматического управленияпроцессом пластикации при литье поддавлением</a>
Устройство для автоматического регулирования величины дозы сыпучих масс при прессованииизделий

Номер патента: 238810
Опубликовано: 01.01.1969
Авторы: Балашов, Берниковский, Ларин
МПК: G01F 11/06
Метки: величины, дозы, масс, прессованииизделий, сыпучих
...(фин. 2) содержит неподвижную ось 6, поворачивающиися на оси блок 7, три штока 8, три пружины 9 с тормозными дисками 10, три подшипника 11, шток 12 со сферической головкой, на ко- О торую опирается пространственная шайба 13,водило 14, копир 15.Со стороны прессующего органа на механизм воздейспвует рычаг 1 (фиг. 1), а на выходе из суммирующего устройства 2 5 (фиг. 2) находится шток 16, который переедает перемещение датчику 3 (фиг. 1).Работа механизма заключается в следуюПосле каждого цикла, прессоввместе с шайбой 13 поворачивавокруг оси 6. Поворот выполняеханическую передачу от однопресса, например поворотногоной каретки, шибера и т. д,Во время поворота блока и шайбы один из штоков 8, который запомнил первое устаревшее слагаемое, прои...
Устройство управления рабочим органом для выправки положения пути

Номер патента: 966130
Опубликовано: 15.10.1982
Авторы: Данилкин, Ершова, Иванов, Перепелкин, Шарапов, Юдин
МПК: E01B 33/18
Метки: выправки, органом, положения, пути, рабочим
...с датчикомприращенийположения пути, который через блок 9задания программной величины связан с одним иэ входов блока 10 сравнения, другой вход которого связан с выходом датчика 5 положения пути, а выход блока 10 сравнения соединен с рабочим органом 11 для выправки пути.Для обеспечения работы устройства, например, на переходной кривой, необходимо до начала переходной кривой 130 Фпри помощи блока 9 задания программной величины установить величинутребуемого приращения стрелы изгибаопределяемую радиусом круговой кривойи длиной ее переходной, а в началепереходной кривой посредством блока7 управления включить связь междудатчиком 6 пройденного пути и датчиком 8 приращений, а также знак прира щенийв зависимости от того "левая"или...
Устройство формирования сигнала положения системы позиционирования
Номер патента: 1314382
Опубликовано: 30.05.1987
Авторы: Кривецков, Мерзляков, Столяров, Стукалов
МПК: G11B 21/04
Метки: позиционирования, положения, сигнала, системы, формирования
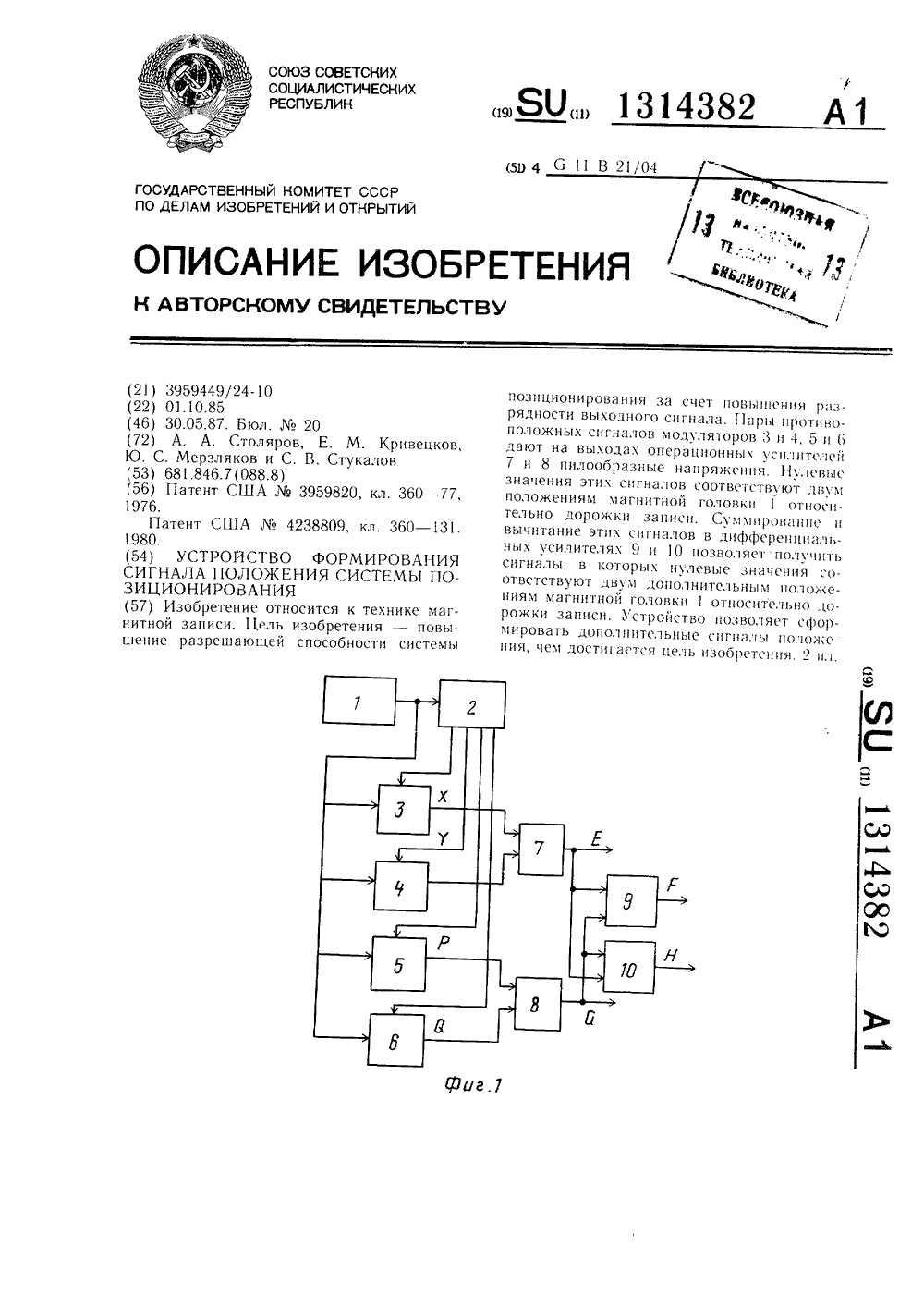
...разредающей способности системы позициониро 5 вания за счет повышения разрядности сформированного сигнала.На фиг. 1 показана функциональная схема устройства; на фиг. 2 -- временная диаграмма выходных сигналов при переме шенин магнитной головки вдоль радиуса дискового магнитного носителя.Устройство содержит магнитную головку 1, генератор 2 стробирующих импульсов, демодуляторы 3 - 6, операционные усинлители 7 и 8, суммирующии и вычитаю 15 гций дифференциальные усилители 9 и 10 соответственно.Устройство работает следующим образом.Магнитная головка 1 имеет длину рабочего зазора, равную ширине двух дорожек на которых записаны четыре типа фазомодулироваццых сигналов. Поэтому сигнал, воспроизведенный магнитной головкой 1, демоду...
Пневматическое струйно-мембранное устройство для автоматической коррекции величины дозы

Номер патента: 365698
Опубликовано: 01.01.1973
МПК: G05B 15/00, G06D 7/00
Метки: автоматической, величины, дозы, коррекции, пневматическое, струйно-мембранное
...35 40 45 50 55 60 65 4элементы И 40 - 47 в соответствующих группах блока задания суммарного количества отклонений с учетом их знака.Коммутаторы 30 и 39 уставки блока б задания суммарного количества отклонений могут быть выполнены в виде сменных плат с фиксированной разведкой каналов (либо иным способом), причем каждому значению суммарного количества отклонений соответствует определенная коммутация входных и выходных каналов коммутатора, Например, для получения величины суммарного количества отклонений, равной 2, необходимо соединить каналы а - а(е - е), б - б(ж - ж), в - в (и - и), г - г(к - к), для получения величины суммарного количества отклонений, равной У, должны быть соединены каналы в - а(и - е), г - б(к - ж), д - в(л - к).Для...
Устройство измерения временного положения угломерного сигнала
Номер патента: 1329400
Опубликовано: 27.08.1996
Автор: Пономаренко
МПК: G01S 7/28
Метки: временного, положения, сигнала, угломерного
1. Устройство измерения временного положения угломерного сигнала, содержащее синхронизатор, последовательно соединенные согласованный фильтр, амплитудный детектор, пиковый детектор, квадратор, блок вычитания, первый компаратор и коммутатор, а также N нелинейных преобразователей, N фиксаторов максимума сигнала, блок выбора максимального сигнала, второй и третий компараторы, выход амплитудного детектора соединен с входом каждого из N нелинейных преобразователей, первый выход каждого из которых соединен через одноименный из N фиксаторов максимума сигнала с одноименным из N первых входов блока выбора максимального сигнала, первый выход которого соединен с вторым входом блока вычитания и через третий компаратор с вторым входом коммутатора,...
Предыдущий патент: Способ изготовления сильфонныхчувствительных элементов
Следующий патент: Способ экструзии поливинилхлоридныхпластизолей
Случайный патент: Механический пресс