Устройство позиционного программ-ного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
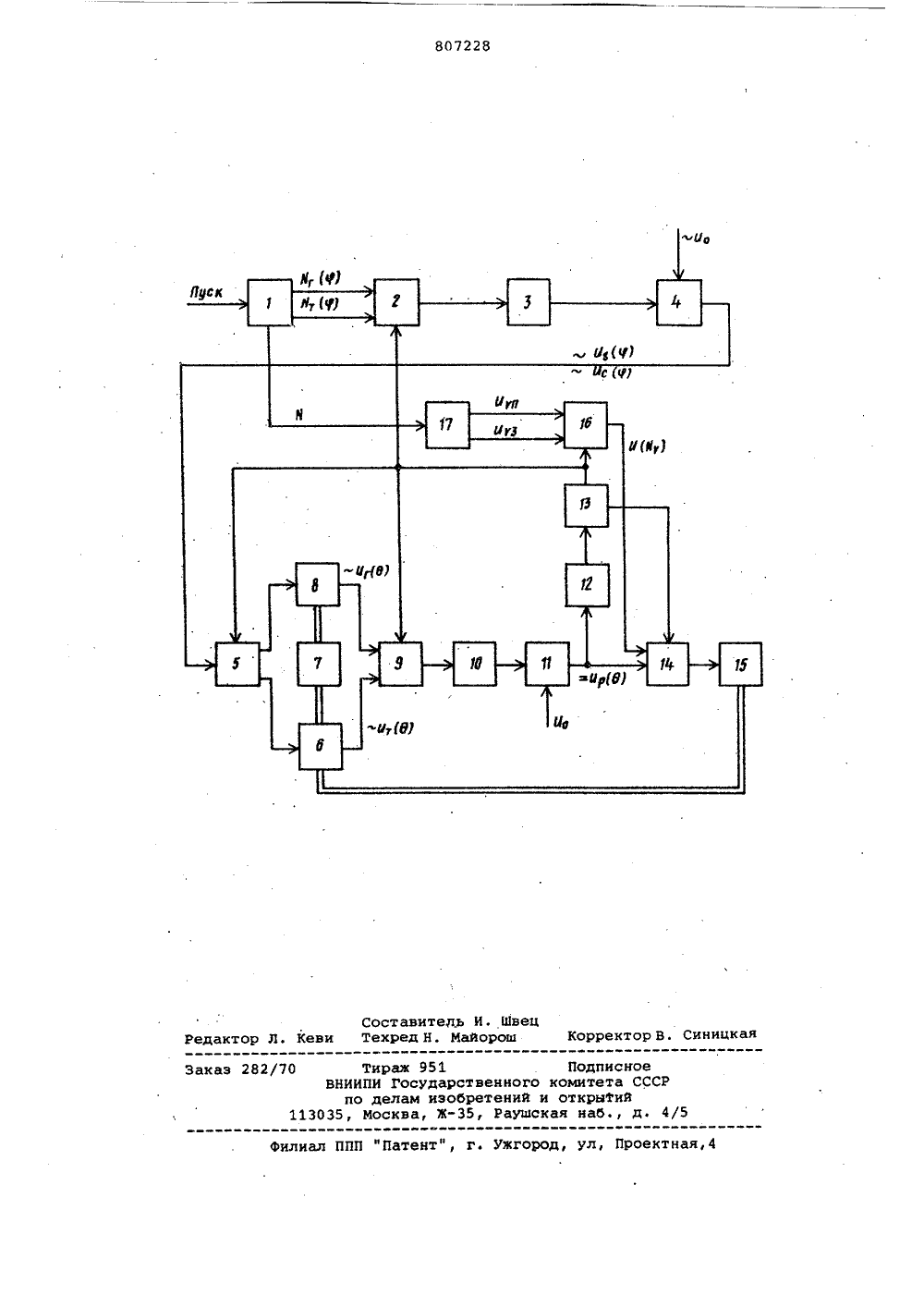
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИ ИЕЛЬСТВУ Сфвз СоветскихСоциалистическихРеспублнк и 1807228(23) Приоритет Государственный коинтет СССР во даааи нзобретеннй н открытнйОпубликовано 2302,81. Бюллетень 49 7 Дата опубликования описания 23. 02. 81(54) УСТРОЙСТВО ПОЗИЦИОННОГО ПРОГРАИМНОГО УПРАВЛЕНИЯИзобретение относится к управлению и регулированию технологическими процессами, в частности.предназначено для точностного позиционного программного управления .исполнительными органами металлорежущего оборудования. Известна цифровая система позиционного регулирования, содержащая программно-задающее устройство,цифроаналоговый преобразователь, сумматор, первый блок допускового. контроля, выход которого подключен к первому входу блока сигнализации. отказа систеьаю, а второй вход - к выходу сигнализатора останова привода,вы ход цифроаналогойого.преобразователя через блок управления. соединен с двигателем, выходной вал которого соединен с первым и вторым датчиками обратной связи, второй блок допус кового контроля,.первый вход которого подключен к выходу сигнализатора останова привода, второй входк выходу программно-задающего устройства, третий вход - к выходу, И второго датчика обратной связи,а выход подключен к второму входу бло ка сигнализации 1 .Наиболее близкой по технической сущности к предлагаемому. является .сис.ЗО тема позиционного, программного управления приводом. подач, содержа 1 щая генератор, устройство ввода, дешиФратор, выходами. соединенный с цифроаналоговыми, преобразователями грубого и точного отсчета, сеЛекторные переключатели, усилитель постоянного тока, нуль-орган, выпрямитель И вращакщиеся .трансформа,торы 2.ОднакЬ применение двух блоков цифроаналоговых. преобразователей (одного для.канала .грубого и другого для точного отсчетов) дорогостоящих технологически и сложных конструктивно,. например из-за нестан-, дартных секционированных трансформаторов, значительного.количества коммутирукицих секций элементов - до 20 на один десятичный. разряд и другое, не способствует надежной работе системы а при отказе одного из цифроаналоговых преобразователей возможен брак обрабатываемой детали.Цель изобретения - упрощение и повышение надежности .системы.Поставленная цель. достигается тем, что в устройство позиционного программного управления, содержащее дешифратор, цифроаналоговый преобразователь, редуктор, кинематическисоединенный с первым и вторым датчиками обратной связи, выходы которых через последовательно соединенные первый коммутатор, усилитель фаэочувствительный выпрямитель, и второй коммутатор соединены с входом привода подач, блок ввода информации, выход которого через последовательно соединенные эадатчик скорости и третий коммутатор подключен к второму входу второго коммутатора, третий вход которого подключен к первому выходу селекторного переключателя, второй выход которого соединен с вторым входом третьего коммутатора и входом через нуль-орган с выходом Фаэочувствительного выпрямителя, введены четвертый и пятый коммутаторы, управляющие входы которых соединены с вторым выходом селекторного переключателя, информационные входы четвертого коммутатора подключены к вторым выходам блока ввода информации, а выход через последовательно соединенные дешифратор и цифроаналоговый преобразователь к информационному входу пятого коььФтатора, первый и второй выходы которого подключены соответственно к входам пер- вого и второго датчиков обратной связи.На чертеже представлена блок"схема устройства позиционного программного управления.Устройство содержит блок 1 ввода информации, четвертый коммутатор 2каналов, дешифратор 3, цифроаналоговый преобразователь 4, пятыйкоммутатор 5 каналов, первый датчик6 обратной связи, редуктор 7, второй датчик 8 обратной связи, первыйкоммутатор 9 каналов, усилитель 10переменного тока, фаэочувствительныйвыпрямитель 11, нуль-орган 12, се"лекторный переключатель 13,второйкоммутатор 14, привод 15 подач, третий коммутатор 16 и эадатчик 17 скорости.Устройство работает следующимобразом.С началом перемещения. исполнительного органа станка от исходной позиции от блока 1 ввода информациикоммутатор 2 каналов пропускает.дискретные сигналы в двоично-десятичном коде старших разрядов й,.(М)(где Ч - угол, пропорциональный заданному перемещению).на дешифратор3, которые далее, пройдя через циф"роаналоговый преобразователь 4, преобразуются в два аналоговых синусо"идальных напряжения, модулированныхпо амплитуде по закону синуса Ой(М)и косинуса О (%), пропорциональнозаданномуперемещению и через коммутатор 5 поступают на вход датчика 8 обратной связи грубого отсчета, например на соответствующие входныеобмотки вращающегося трансформатора,с выхода которого (в указанном случае с выходной роторной обмотки)сигнал в той же форме, но пропорциональный по амплитуде углу рассогласования 9 (где 6- угол рассогласования) ме;кду заданным и отработанным перемещениями О 1.( 9)поступает через коммутатор 9,и усилитель 10 пе- (ременного тока на фазочувствительныйвыпрямитель 11, с выхода которого сигнал уже постоянного тока с полярностью определяемой Фазой заданноого угла Ч кратной 180, поступаетна входы нуль-органа 12 и коммутатора 14.Одновременно с рабочим сигналомдатчика обратной связи грубого отсчета от блока 1 ввода информации в канал скорости перемещения поступают 20 дискретные сигналы й в двоично-десятичном коде и, пройдя через эадатчик 17 скорости, преобразуются вдва аналоговых напряжения постоянного тока, первый из которых О 25 пропорционален по амплитуде заданнойскорости перемещения,.а второйОу - медленной (" ползущей" ) скочрости подхода к заданной точке.Сигнал О пропорциональный заданнойЪ 130 скорости, через коммутаторы 16 и 14проходит на вход управления приводом 15 подач. При перемещении исполнительного органа станка к заданной точке привод работает в режимеуправления по скорости и в разомкнутом по положению. При этом, нанекотором расстоянии до конца пути (регулируется при настройке система), непревышающем половины шага датчика6 обратной связи точного отсчета 40 сигнал О (9) с датчика 8 обратнойсвязи грубого отсчета уменьшаетсядо установленного уровня зоны нечувствительности нуль-органа 12, свыхода которого, вследствие этого, 45 поступает релейный сигнал в селекторный переключатель 13 и на его первом выходе появляется аналогичныйсигнал, поступаощий иа управляющиевходы коммутаторов 2,5,9 и 16. В - 50 результате, коммутаторы 2 и 5 пропускают дискретные и аналоговые сигналы младших разрядов, коммутатор 9переключает вход усилителя 10 переменного тока с выхода датчика 8 обратной связи грубого отсчета на выход датчика,6 обратной связи точного отсчета, а через коммутаторы 16и 14 подается на управление приводом15 подач напряжение, пропорциональное ползущей скорости, образуя пер 40 вую зону торможения, при этом черезкоммутатор 9, усилитель 10 переменного тока и фаэочувствительныйвыпрямитель 11 на вход нуль"органа12 вновь подается рабочий сигнал от65 датчика 6 обратной связи точногоотсчета. При приближении. к заданной точке на расстояние .(выбирается при настройке системы), не превышающее нескольких дискретных значений программируемого пути, сигнал,с датчика 6 обратной связи, точного отсчета также уменьшается.до установленного уровня эоны нечувствительности нуль-органа 12, с выхода, которого повторный релейный сигнал поступает в селекторный переключатель 13, вырабатывающий релейный сигнал на своем втором выходе, который подается на управляющий. вход коммута- тора 14. Последний переключает. управляющий вход привода 15 подач.с выхода коммутатора 1 б канала скорости на выход фазочувствительного выпрямителя 11,.образуя окончательную зону торможения привода в следящем режиме с датчика б обратной связи точного отсчета. Останов привода подач 15 фиксируется нуль-органом 12 и селекторным переключателем 13 эа счет другого установленного уровня зоны нечувствительности. нуль"органа 12, соответствующего зоне нечувствительности привода 15 подач, ввиду чего селекторным переключателем 13 выдается сигнал на выключение системы в момент точного останова исполни" тельного органа. Замена двух трансформаторных цифроаналоговых преобразователей одним в многоканальных системах числового программного. Управления конструктивно упрощает систему и технологию ее изготовления, . что повышает надежность ее работы, По предварительным подсчетам предлагаемое устройство позволяет снизить расходы по созданию его в 5- 6 раз.Формула изобретенияУстройство позиционного програь- много управления, .содержащее дешиф" ратор, цифроаналоговый.преобразова.тель, редуктор, кинематически соединенный.с первым и вторым датчиками обратной связи, выходы которыхчерез последовательно соединенныепервый коммутатор, усилитель, фазочувствительный выпрямитель и второйкоммутатор соединены с входом приво"да подач, блок ввода. информации, выход которого через последовательносоединенные,задатчик скорости итретий коммутатор. подключен к второму входу второго. коммутатора, третийвход которого подключен к первомувыходу селекторного переключателя,второй выход которого соединен с втз рым входом третьего коммутатора ивходом через нуль-орган. с выходомфаэочувствительного вйпрямителя,о т л и ч а ю щ е е с я тем, что,с целью повышения надежности и упро щения устройства, в него введенычетвертый и пятый коммутаторы, управляющие входы которых. жединены свторым выходом, селекторного переключателя, информационные входы четку вертого коммутатора подключены квторым выходам блока, ввода информации, а выход через последовательносоединенные дешифратор и цифроаналоговый преобразователь к информаЭ 0 ционному, входу пятого коммутатора,первый й второй выходы которого подключены соответственно к входам первого и второго датчиков обратнойсвязи. Источнжкм информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР9 557353, кл. О 05 В 19/18, 1976.2. Лещенко В.А, Гидравлические 40 следящие приводы станков с программным управлением, М., "Машиностроение", 1975, с. 57 (прототип),807228 едакт Тираж 951 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открыий 13035, Москва, Ж, Раушская наб., д. 4
СмотретьЗаявка
2687526, 23.11.1978
ПРЕДПРИЯТИЕ ПЯ М-5671
ХАРИТОНОВ ЕВГЕНИЙ ВАСИЛЬЕВИЧ, КИСЕЛЕВ ВИКТОР МИХАЙЛОВИЧ, РОМАНОВ ВЯЧЕСЛАВ ИВАНОВИЧ
МПК / Метки
МПК: G05B 19/33
Метки: позиционного, программ-ного
Опубликовано: 23.02.1981
Код ссылки
<a href="https://patents.su/4-807228-ustrojjstvo-pozicionnogo-programm-nogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство позиционного программ-ного управления</a>
Электропривод мишени ускорителя с таймерным устройством для импульсного быстрого реактора

Номер патента: 456344
Опубликовано: 05.05.1976
МПК: H02P 5/00
Метки: быстрого, импульсного, мишени, реактора, таймерным, ускорителя, устройством, электропривод
...гроходит мимо устройства ускорителя 8.Блок 10 непосредственно, соединен только с частью рвзрядов блоха.13, в с остальными разрядами через блох 16, При звмкйутом переключателе 17 все разряды блока 16 подключаются к выходу (1) логической схемы блока 10. При этом блок 16 не рвботает.Цифровой регулятор работает следующим .образом При появлении импульса в устрой стве 5 датчика 4 в блоке 10 формируется передний фронт измеряемого интерввлв времени. При этом задание переносится из блокв 11 в счетчик 12 и затем происходит измерение длительности интерввлв времени, пропорционального скорости вращения привода. Измерение производится посредством подсчета в счетчике 12 суммарного количества импульсов, введенных параллельным кодом из блока 11 и...
Способ определения момента времени перехода сигнала через нуль

Номер патента: 1734200
Опубликовано: 15.05.1992
Авторы: Боголюбов, Игнатов, Нагорный, Рябцев, Тараненко, Яновский
МПК: H03K 5/153
Метки: времени, момента, нуль, перехода, сигнала
...18, выход которого подключен к входу блока индикации 19, выход первого компаратора 8 подключен к объединенным установочному входу первого триггера 3 и входу дифцепи 16, выход которой через третий диод 13 в обратном включении подключен к установочному входу второго триггера 4, выход которого подключен к управляющему входу коммутатора 17, выход первого триггера 3 подключен к управляющему входу первого ключа 1, объединенные второй вход первого компаратора 8 и информационный вход первого ключа 1 соединены с информационным входом устройства, вход сброса которого подключен к объединенным входам сброса триггеров 3, 4, 5, функционального преобразователя 18, блока индикации 19, интеграторов 6, 7.Устройство, реализующее способ,...
Способ передачи и приема полного цветового телевизионного сигнала с временным уплотнением яркостных и цветовых составляющих и устройство для его осуществления

Номер патента: 1464300
Опубликовано: 07.03.1989
Авторы: Безруков, Жданов, Котельников
МПК: H04N 11/22
Метки: временным, передачи, полного, приема, сигнала, составляющих, телевизионного, уплотнением, цветового, цветовых, яркостных
...10 задержки с масштабновременным преобразованием, во второмблоке 11 задержки с масштабно-временным преобразованием записываются внакопитель с одной скоростью цветоразностные сигналы и сигнал разностицветоразностных сигналов, а считываются с другой, повышенной для обоихсигналов скоростью. Причем сигналразности цветоразностных сигналовсчитывается во время, соответствующее интервалам гашения растянутого 4во времени сигнала яркости опорныхполей, занимая часть этих интервалов.Растянутые и сжатые во времени сигналы поступают на первый электронныйкоммутатор 12, который объединяетэти сигналы в единую последовательность. При сжатии и растяжении сигна-лов во времени расширяется и сжимается соответственно спектр этихсигналов, Для уменьшения...
Устройство для автоматического измерения частотных характеристик каналов связи

Номер патента: 650237
Опубликовано: 28.02.1979
МПК: H04B 3/46
Метки: каналов, связи, характеристик, частотных
...блока 10, к остальным входам которого подключены выход блока контроля 21 и выход трансмиттера 22.Устройство, работает следующим образом.По команде Начало измерения информация о требуемой частоте генератора 1 считывается с трансмиттера 22 и через программный блок 10 поступает на генератор 1 и избирательный усилитель 20, Одновременно эта команда поступает на аналогичное устройство, находящееся в испол 5 1 О 15 20 25 зо 35 40 45 50 55 6 О 65 нительном режиме, через блок 15 передачи команд, согласующий блок 16 передачи и измеряемый тракт.Программный блок 10 выдает команды на первый коммутатор 2 для подключения генератора 1 к входу аттенюатора 6, 7 или 8, на второй коммутатор 3 для подключения выхода аттенюатора б, 7 или 8 к входу...
Преобразователь двоичного кода в двоично-десятичный и обратно

Номер патента: 1086424
Опубликовано: 15.04.1984
Авторы: Барметов, Боев, Евтеев
МПК: G06F 5/02
Метки: двоично-десятичный, двоичного, кода, обратно
...или прямого ной установки преобразователя и сое- кода с выхода сумматора 7.ф 25динен с входами сброса триггера, Коммутатор 2 осуществляет передачу счетчика, регистров двоичного и двоич кода с информационного входа 19 прено-десятичного кодов, выходы которых образователя или с выходов регистраявляются соответственно первой и 16 двоично-десятичного кода. Выходы второй группами информационных выхо- регистров 5 и 16 являются первой 20 дов преобразователя, вторая группа З 0 и второй 21 группами выходов преобинформационных входов которого соеди- Разователя, выход 22 которого являетнена с первыми информационными входа- ся выходом конца преобразования, ми второго многоразрядного коммута- Управляющий вход 23 задает выбор затора, вторые...
Предыдущий патент: Устройство для управления технологи-ческими параметрами движущихсяобектов, например, намоткойпропитанной ленты
Следующий патент: Способ двухкоординатногопрограммного управления
Случайный патент: Устройство для контроля прогиба проката