Устройство для управления адаптивнымроботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 798710
Автор: Меньших
Текст
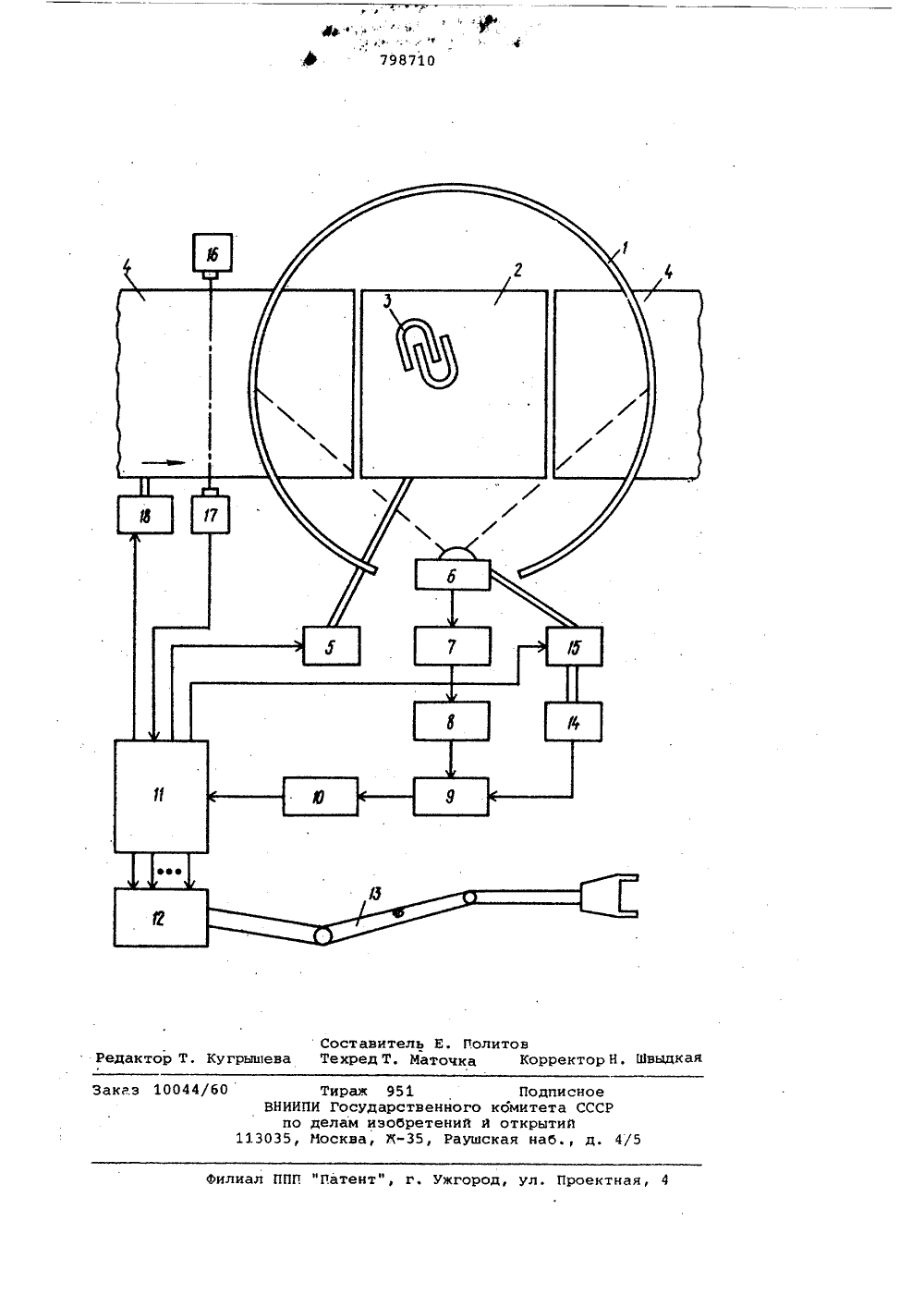
)" . Я. вЛф Фъ-.е.ъ-.фчь ., .,кклие Союз Соаетскнк Соцналнстнчесннк Республик(61) Дополнительмое к авт. свид-ву(22) Заявлено 130479 (21) 2752721/18-24с присоединением заявки йо(51) М. Кл.з 6 05 В 15/00 В 25 3 13/00 Государстаениый комитет СССР по делам изобретений и открытий(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМРОБОТОМ Изобретение относится к технической кибернетике и автоматизированным системам управления и может быть использовано при создании устройств для управления адаптивным роботом, например, обслуживающим конвейерную линии.Известное устройство для управления адаптивным роботом, содержащее блок памяти, спецпроцессоры, телевизионную передающую камеру, дисплей, преобразователи, блок печати и блок управления приводами исполнительного органа робота, является чрезвычайно сложным 1 .15Наиболее близким по технической сущности к предлагаемому изобретению является устройство, содержащее первый излучатель и последовательно соединенные диссектор, Формирователь 20 строб-импульсов, преобразователь угол код, вычислитель координат, блок памяти и управляющий блок, первый выход которого соединен со входом привода вертикального перемещения рабочего стола, второй выход - со входом привода конвейера, а третьи выходы " со входами приводов исполнительного органа робота, а также привод и датчик вращения рабочего стола 21. ЗЦ Недостатком этого устройства является наличие вращения рабочего стола. В целях увеличения быстродействия уст ройства необходимо повышать угловую скорость вращения рабочего стола, а это приводит к снижению устойчивости положения объектов на вращающемся рабочем столе под действием центробежных сил.Цель изобретения - повьзаение быстродействия устройства.Поставленная цель достигается тем, что устройство содержит оптически связанные второй излучатель и приемник, а также привод вращения диссектора и датчик вращения диссектора, выход которого подключен ко второму входу вычислителя координат, второй вход управляющего блока соединен с выходом приемника, а четвертый выход - со входом привода вращения диссектора.На чертеже изображена функциональная схема устройства.Устройство содержит первый излучатель 1, выполненный в виде кольцевой конструкции, рабочий стол 2 (например, в виде отрезка конвейерной линии), объект 3 манипулирования, лента 4 конвейера, стыкующаяся с рабочим столом, привод 5 вертикального перемещения рабочего стола, диссектор 6 формирователь 7 строб-импульсов, преобразователь 8 угол-код, вычислитель 9 координат, блок 10 памяти, управляющий блок 11, приводы 12 исполнительного органа робота, исполнительный орган 13 робота, датчик 14 вращения диссектора, привод 15 вращения диссектора, второй излучатель 16, приемник 17, привод 18 конвейера. ОУстройство работает следующим об разом.При расположении объекта 3 манипулирования на рабочем столе 2 изображение видимой части первого излуча теля 1 Формируется на фотокатоде диссектора б в виде прерывистой светлой линии, считывание которой периодически сканирующей электронной щелью диссектора приводит к возникновению на его выходе периодического широтно импульсного сигнала, Информация об углах визирования начальной и конечной границ объекта 3, затеняющего собой соответствующие части излучателя 1 иэ точки наблюдения (точки ок ружности, относительно которой вращается главная плоскость объектива диссектора 6), сосредоточена во временном положении фронтов и спадов импульсов в укаэанной периодической ЗО последовательности широтно-импульсного сигнала. Положение фронтов и спадов чередуется, что позволяет разделять их и Формировать соответствующие последовательности строб-импульсов для совокупности фронтов и спадо с помощью Формирователя 7 строб-импульсов. Временное положение этих строб-импульсов в условиях привязки начала отсчета времени в пределах каждого из периодов сканирования дис 40 сектором б однозначно характеризует азимуты начальной и конечной границ визирования объекта 3 с данного ракурса, угловое положение которого задается с помощью датчика 14 враще ния диссектора. Значение этих азимутов преобразуется в двоичный многоРазрядный код в преобразователе 8 угол-код, Преобразование системы отсчета (иэ вращающейся в неподвижную) р и вычисление координат вершин описанного многоугольника вокруг выпукло-преобразованного контура объекта 3 в плоскости его зрительного сканирования диссектором 6 (эта плоскость образуется плоскостью расположения излучателя 1 кольцевого типа и оптической оси диссектора 6) осуществляется в вычислителе 9 координат, на первый вход которого последовательно поступает информация еО в кодовом представлении об азимутах линий визирования начальной и конечной границ объекта (раздельно по типам границ визирования), а на второй вход - информация о преобразовании Я вращающейся системы отсчета, т. е.об угле ракурса наблюдения рабочейзоны диссектором б.В вычислителе 9 координат определяются координаты точек пересеченияуказанных групп смежных пар линийвизирования объекта, Эти данные передаются в блок 10 памяти, в которомони запоминактся и реконструируютнекоторую ломанную прямую, огибающейкоторой является выпукло-преобразованный контур объекта, положение которого (форма и ориентация) однозначно известно в заданной системе отсчета рабочего стола 2.Соединение отсчетов указанных группломанных прямых (раздельно для отсчетов начальной и конечной границ объекта) и аппроксимация их до контура,адекватного искомому контуру объекта,осуществляется в управляющем блоке11. Это позволяет сформировать соответствующие сигналы управления на основе априорных сведений о текущемположении и кинематике исполнительного органа 13 робота, посредством которых на приводы исполнительного органа 12 робота задаются воздействия,обусловливающие правильный захватобъекта 3. Последний детерминирован,и сведения о том, каков правильныйзахват его манипулятором, заложеныв оперативной или долговременной памяти управлявшего блока 11,Помещение объекта 3 на рабочийстол 2 производится движением ленты4 конвейера под действием привода 18конвейера, управляеМого блоком 11.Для этого используется второй излучатель 16 и приемник 17 (например,свето- и Фотодиоды соответственно),оптически связанные между собой в отсутствии на линии их связи (поперекленты 4 конвейера) объекта 3. По мере того, как объект 3 движется с лентой 4 конвейера в направлении,к рабочему столу 2, плоскость которого совпадает с плоскостью ленты 4 конвейерана выходе приемника 17 образуетсяширотно-импульсный сигнал, Начало которого при начале затенения объектом3 второго излучателя 16 (спад импульса на выходе приемника 17) и его конец регистрируются в блоке 11, Призаданной скорости движения ленты 4конвейера длительность образующегосяимпульса на выходе приемника 17 определяет протяженность объекта вдольлинии протяжки его конвейером. Поскольку расстояние между центром рабочего стола 2 и линией оптическойсвязи второго излучателя 16 и приемника 17 строго известно и неизменно,а также известна скорость движенияленты 4 конвейера и отрезка конвейера, составляющего рабочий стол 2, идвижущегося с той же скоростью, чтои лента 4 конвейера, то с учетом вычисленной в блоке 11 протяженностиобъекта 3 вдоль линии движения ленты4 конвейера определяется момент остановки привода конвейера 18, соответствующий приблизительно выведениюобъекта 3 на центральную зону рабочего стола 2,5По мере остановки ленты 4 конвейера блок 11 подает сигнал на вход привода 5 вертикального перемещения рабочего стола, с помощью которого объект 3 вводится в рабочую зону зрительного сенсора, т. е. пересекает плоскость зрительного сканирования, расположенную на уровне закрепления диссектора 6 и излучателя 1 кольцевоготипа. Необходимость в подъеме рабочего стола 2 связана с тем, что конструкция зрительного сенсора располагает"я выше плоскости ленты 4 конвейера.При непрерывном движении ленты конвейера 4 и старт-стопном режиме движе-Щния ленты рабочего-стола 2 привод движения ленты рабочего стола управляетсяблоком 10, а для движения ленты конвейера 4 предусмотрен аварийный останов, используемый в том случае,если лента конвейера движется достаточно быстро, объекты 3 на ленте установлены достаточно часто, а быстродействия исполнительного органа 13робота недостаточно для съема объектов 3 с рабочего стола 2 и установки,их в требуемую область технологического пространства.Применение изобретения позволитза счет исключения вращения рабочегостола повысить быстродействие устрой- Иства. Формула изобретенияУстройство для управления адаптивным роботом, содержащее первый излучатель и последовательно соединенныедиссектор, формирователь строб-импульсов, преобразователь угол-код,вычислитель координат, блок памятии управляющий блок, первый выход которого соединен со входом приводавертикального перемещения раб остола, второй выход - со входом привода конвейера, а третьи выходы - совходами приводов исполнительного органа робота, о т л и ч а ю щ е е с ятем, что, с целью повышения быстродействия устройства, оно содержит оптичесни связанные вторбй излучатель иприемник, а также привод вращенияциссектора и датчик вращения диссектора, выход которого подключен ковторому входу вычислителя координат,второй вход управляющего блока соединен с выходом приемника, а четвертый выход - со входом привода вращения диссектора,Источники информации,принятые во внимание при экспертизе 1. Дистанционно-управляемые роботы-манипуляторы. Сб. статей под ред. Попова Е. П. И., "Мир", 1976, с. 99.134.2. Авторское свидетельство СССРпо заявке М 2056396/18-24,кл. В 25 Х 13/00, 1974 (прототип).
СмотретьЗаявка
2752721, 13.04.1979
МЕНЬШИХ ОЛЕГ ФЕДОРОВИЧ
МПК / Метки
МПК: G05B 15/00
Метки: адаптивнымроботом
Опубликовано: 23.01.1981
Код ссылки
<a href="https://patents.su/4-798710-ustrojjstvo-dlya-upravleniya-adaptivnymrobotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивнымроботом</a>
Способ обработки рабочей поверхности блока ivvarhmthblx головок

Номер патента: 260685
Опубликовано: 01.01.1970
Авторы: Гавриш, Каменев, Ковенский, Хошйдан
МПК: G11B 5/187
Метки: ivvarhmthblx, блока, головок, поверхности, рабочей
...магнитных головок подводят к вращаемсму абразивному кругу из карбида кремния зеленого на глифталевой связке 7 - 14 лк, окружная скорость которого равна 30 - 35 лт/сек. При обработке рабочей поверхности на абразивном круге производят ее охлаждение с томощью эмуль"ии, Затем рабочую поверхность обрабатыва 1 от на абразивном бруске из карбида кремния зеленого зернистостью 1 - 3 лк магнитных головок вращают что окружная скорость перем поверхности равна 0,3 - 0,5 м ный брусок перемещают вдоль зазоров со скоростью 4 - б л менно с перемещением бруска его колеблют вдоль этой же равной 15 - 20 колебаниям в туде колеоаний 3 - 5 млт,Описанный способ может н для изготовления блоков маги повышенными требованиями параметров послечних,1. Способ...
Устройство для определения рабочего слоя биметаллической магнитной ленты

Номер патента: 360627
Опубликовано: 01.01.1972
Автор: Рылешников
МПК: G01R 33/12
Метки: биметаллической, ленты, магнитной, рабочего, слоя
...Стержень 2, сво. бодно перемещаемый в корпусе 4 устройства, прижат к кулачку 8 при помощи пружины 5. Для смягчения даров межд флаццсм 6 стержня 2 и корпусом 4 установлена эластичная прокладка 7. Головка 1 жестко связана с источником постоянного магнитного поля и смонтирована с возможностью перемещения совместно с нпм поперек ребра биметаллической магнитной ленты 8 вдоль ее плоскости..Лента 8 неподвижно установлена ца эластичной подложке 9. В качестве источника посто.10 яцного магнитного поля может служить какпостоянный магнит, укрепленный на головке 1, так и ее рабочий зазор, если в обмотку головки подается постоянный ток, Источник 10 постоянного тока может быть подключен к от дельцой обмотке цли в той же обмотке, с которой снимают...
Устройство для загрузки длинно-волокнистого материала в трубопровод пневмотранспортной установки

Номер патента: 1204520
Опубликовано: 15.01.1986
Авторы: Джингильбаев, Локшин, Силуков
МПК: A01D 89/00, B65G 53/46
Метки: длинно-волокнистого, загрузки, пневмотранспортной, трубопровод, установки
...наб., д. 4/5филиал ППП Патент, г. Ужгород, ул. Проектная, 4 Редактор М. ЦиткинаЗаказ 8478/20 Изобретение относится к промьпнленному транспорту, а именно к устройствам для загрузки длинноволокнистого материала в трубопровод пневмотранспортной установки.На чертеже схематически показано устройство.Устройство содержит воронку 1, сообщенную с загрузочным отверстием 2 трубопровода 3. В воронке 1 параллельно ее наклонным стенкам установлены конвейеры 10 4 и 5 с замкнутым рабочим органом. Оси вращения барабанов 6 и 7 конвейеров 4 и 5 расположены перпендикулярно оси трубопровода 3. В загрузочном отверстии 2 трубопровода 3 установлен также лопастной ротор 8, ось вращения которого параллельна осям вращения барабанов 6 и 7 конвейеров 4 и 5....
Механизм для прерывистого вращения рабочего объекта

Номер патента: 1010360
Опубликовано: 07.04.1983
Авторы: Зверев, Падерно, Пантелеев
МПК: F16H 27/06
Метки: вращения, механизм, объекта, прерывистого, рабочего
...видешестеренчатой передачи, ограничиваетвозможность изменения соотношенияпериодов останова и вращения рабочего объекта,Целью изобретения является повышениеточности и надежности позиционирования рабочего объекта при лю.бом соотношении периодов его вращения и останова.Указанная цель достигается тем,что в механизме для прерывистоговращения рабочего объекта, содержа"щем привод, ведущий и ведомый валы,установленный на последнем кривошип,взаимодействующий с пазами мальтийского креста, связываемого с рабочимобъектом, узел, передающий вращениекривошипу, и узел программного управления, включающий пространственный кулачок, взаимодействующий с нимрычаг и фиксатор положения рабочегообъекта, последний выполнен с упором,и соединен с рычагом, а узел,...
Рабочий стол для приготовления продуктов питапия

Номер патента: 282628
Опубликовано: 01.01.1970
Авторы: Бойбородин, Габов, Гах, Данченко, Заверн
МПК: A47B 33/00
Метки: питапия, приготовления, продуктов, рабочий, стол
...на фиг. 3 - то же, в плане; на фиг. 4 - площадка для разделочной доски, в плане; на фиг. 5 - механизм подъема подножки, разрез по Б - Б на фиг. 3. Рабочий стол на конвейере производствапорционных полуфабрикатов содержит вертикальные опоры 1, высота которых регулируется с помощью винтов 2, столешницу 8, име 5 ющую фигурный вырез 4 и накопитель б длясырья, вмонтированный справа от рабочего.Прямо перед фигурным вырезом расположенаплощадка б для разделочной доски и за ней -гнездо 7 для весов, а слева от рабочего нахо 10 дится ролик 8, служащий для перемещениялотков с продукцией на транспортер. На одной из вертикальных опор стола укрепленкронштейн 9 для стула 10, который можетперемещаться в горизонтальной и вертикаль 15 ной плоскостях и...
Предыдущий патент: Электрогидравлический следящий при-вод
Следующий патент: Устройство для управления контейнернымприемником машины грубого волочения
Случайный патент: Способ получения гидрофильного баритового утяжелителя буровых растворов