Манипулятор модульного типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
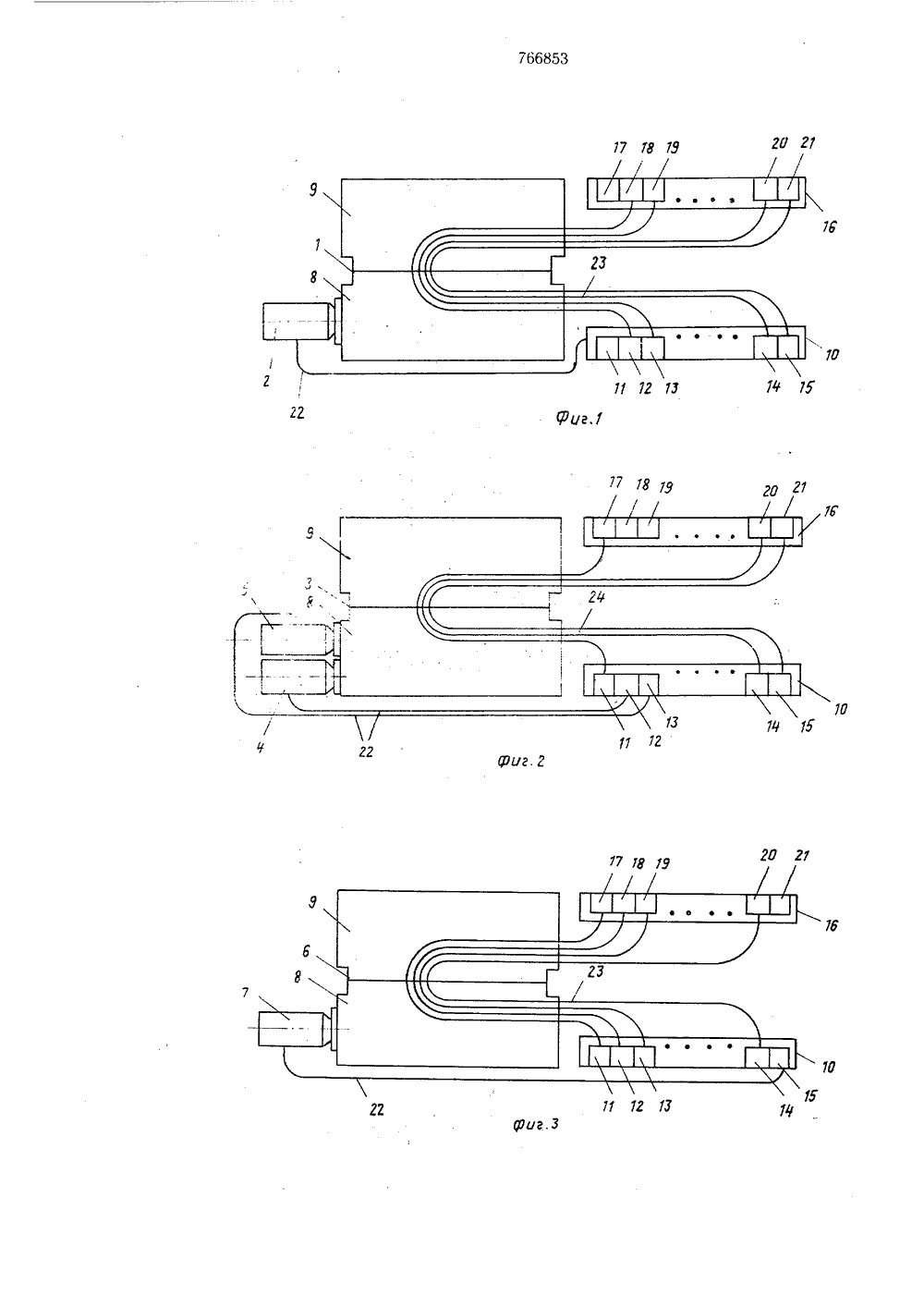
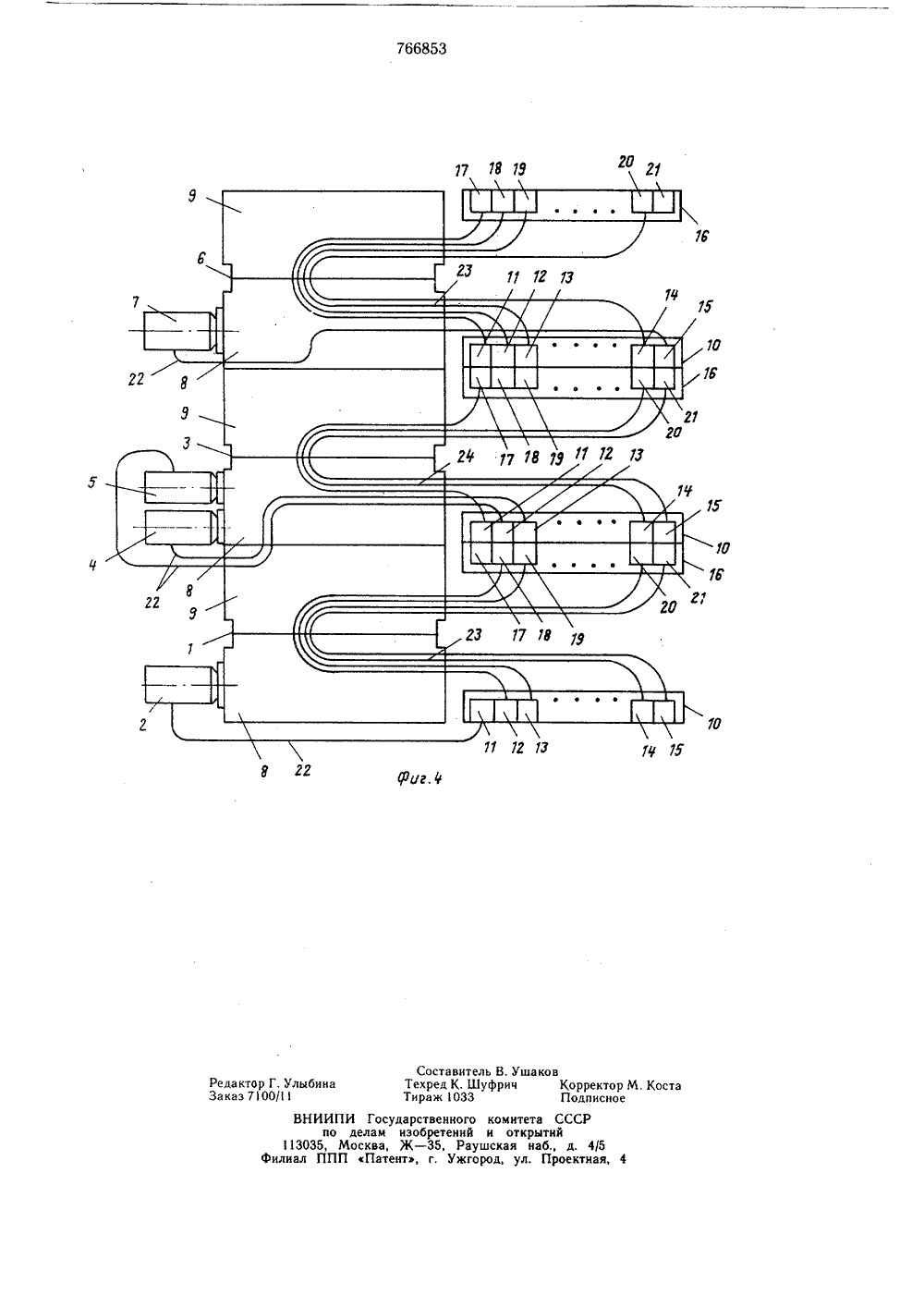
ОП ИСАНИЕИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскихСоциалистическихРеспублик пи 766853по делам изобретений и открытнй(54) МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА Изобретение относится к манипуляторам и может быть использовано в различных областях техники.Известны манипуляторы модульного типа, содержащие унифицированные электро- механические модули и имеющие от одного до п независимых приводов 1.Недостатком таких устройств является необходимость осуществления индивидуальной электроразводки между двигателями и датчиками обратной связи в различных комбинациях модулей, что значительно усложняет и удорожает сборку манипулятора.Целью изобретения является устранение указанного недостатка.Для этого каждый модуль снабжен коммутационным блоком, включающим унифицированные входные и выходные элементы, каждый из которых имеет по и групп контактов, причем привод каждого модуля соединен с соответствующей ему группой контактов входного элемента коммутационного блока данного модуля, а остальные группы контактов входного элемента связаны гибким электрическим кабелем с соответствующими им группами контактов выходного элемента коммутационного блока. На фиг. 1 - 3 изображены блок-схемы Котдельных модулей, например трех, содержащих совместно п независимых приводов; на фиг. 4 - блок-схема одной из компоновок манипулятора модульного типа.Манипулятор модульного типа содержитК модулей с общим количеством и приводов. Например, первый модуль 1 с первым приводом 2, второй модуль 3 со вторым и третьим приводами 4 и 5 и т. д. Последний модуль 6 содержит привод 7. Каждый из тО модулей имеет неподвижную часть 8 и подвижную часть 9. На неподвижной части модулей закреплен вхсдной элемент коммутационного блока 10, содержащий и групп контактов: первую группу 11, вторую группу 12, третью группу 13, (и - 1)-ю группу 14, и п-ную группу 15. На подвижной части 9 модулей расположен выходной элемент коммутационного блока 16, также содержащий и групп контактов: первую группу 17, вторую группу 18, третью группу 19, (и - 1)-ую 20 группу 20 и и-ную группу 21. При этом входной элемент коммутационного блока каждого модуля имеет возможность сопрягаться с выходным элементои коммутационного блока предыдущего модуля. Первая группа контактов 11 входного элемента коммутационного блока 20 первого модуля 1 (фиг. 1) соединена электрическим кабелем 22 с первым приводом 2. Г 1 ервая группа контактов 17 выходного элемента коммутационного блока 16 остается резервной. Все остальные группы контактов вхолного элемента 10 с помощью электрического кабеля 23 связаны с выходным элементом 6 таким ооразом, что вторая группа 12 контактов вхолного элемента связана со второй группой контактов 18 выходного элемента и т. л.Модули могут иметь не более одного независимого привода. Так второй модуль 3 (фиг. 2) может быть, например, двухкоординатным. Привода 4 и 5 связаны с помощью электрических кабелей 22 с группами 12 и 13 контактов вхолного элемента коммутационного блока 10. Группа 18 и 19 контактов 18 и 19 выходного элемента коммутационного блока 16 остаются для модуля 3 резервными. Остальные группы контактов входного элемента 1 О связаны с помощью электрического кабеля 24 с одноименными группами контактов выхолного элемента 16.Последний К-молуль 6 (фиг, 3) содержит п-ный привол 7, связанный с помощью электрического кабеля 22 с п-ной группой контактов 15 вхолного элемента коммутационного блока 1 О, п-ная группа контактов 21 выходного элемента остается резервной, а все остальные группы контактов входного и выхолного элементов коммутационного блока связаны межлу собой электрическим ка-, белем 23.Модули, прелставленные на фиг. 1, могут работать индивидуально. В этом случае к входному элементу коммутационного блока данного модуля подсоединяется выходной элемент коммутационного блока системы управления. При этом получают возмож. ность работы приводы, подсоединенные к соответствующим группам контактов входного элемента коммутационного блока данного модуля посредством электрического кабеля 22. Примененная система электрических коммутационных блоков позволяет подключить к системе управления с помощью одного унифицированного элемента коммутационного блока любой из модулей системы.Ангалогичным образом могут быть подключены к системе управления манипулято. ры, состоящие из комбинации нескольких модулей, причем порядок расположения модулей и их количество может быть произвольным. На фиг. 4 показана блок-схема одного из возможных вариантов модульного манипулятора, который состоит из последовательного соединения первого модуля 1, второго модуля 3 и К-модуля 6.При этом выходной элемент коммутационного блока 16 первого модуля 1 стыкуется с входным элементом коммутационного блока 10 второго модуля, выходной элемент 16 второго модуля 3 стыкуется с входным элементом 10 К-модуля 6. Входной элемент 10 10 первого модуля 1 соединяется с выходным элементом системы управления. Привод 4 второго модуля 3 подсоединяется к системе управления посредством группы 12 контактов входного элемента 1 О первого модчля, электрического кабеля 23, группы 15г18 контактов выхолного элемента 16 модуля 1, группы 12 контактов вхолного элемента 10 модуля 3 и электрического кабеля 22.Аналогичным образом полсоелиняюгся к системе управления остальные приволы мани 2 о пулятора.Таким образом, сборка любых новых компоновок манипуляторов молульного типа не требует дополнительных электрических разводок и состоит лишь в механической стыковке модулей и соединении унифицированыных элементов коммчтационных блоков.Формула изобретенияз 0 Манипулятор модульного типа, содержащий унифицированные электромеханические модули и имеющий от одного до п независимых приводов, отгичающийся тем, что, с целью упрощения сборки вариантов компоновок манипулятора, каждый модуль снабжен коммутационным блоком, включающим унифицированные входные и выходные элементы, каждый из которых имеет по п групп контактов, причем привод каждого модуля соединен с соответствующей ему группой контактов входного элемента коммутационного блока данного модуля, а остальные группы контактов входного элемента связаны гибким электрическим кабелем с соответствующими им группами контактов выходного элемента коммутационного блока.45Источники информации,принятые во внимание при экспертизе 1. Белянин П. Н. Промышленные роботыЯпонии. НИИАТ, 1977, с. 226.66853 го Редактор Г Заказ 7100 Улыбин1 сква, Пат ВНИИПИ по 113035, М Филиал ПППСоставитель В. УшаковТехред К.Шуфрич Корректор М, Кос Тираж 033 Подписное тета СССР ткрытийнаб., д. 4/5 ул. Проектная дарственного ком изобретений и о Ж - 35, Раушскант, г. Ужгород,
СмотретьЗаявка
2532132, 05.10.1977
ПРЕДПРИЯТИЕ ПЯ Р-6930
СУРНИН БОРИС НИКОЛАЕВИЧ, ПОДУСТОВ ВЛАДИМИР ЯКОВЛЕВИЧ, КАЛАБИН ИГОРЬ ВИТАЛЬЕВИЧ, СТЕПАНОВ ВЛАДИМИР ПАВЛОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятор, модульного, типа
Опубликовано: 30.09.1980
Код ссылки
<a href="https://patents.su/4-766853-manipulyator-modulnogo-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор модульного типа</a>
Модуль многокаскадной коммутационной системы

Номер патента: 1793443
Опубликовано: 07.02.1993
Автор: Витиска
МПК: G06F 15/16
Метки: коммутационной, многокаскадной, модуль, системы
...1 в модуле 50,В то же время этот сигнал проключения появится на первой и третьей горизонтальной коммутируемой шине 1 данного модуля 50. так как в нем в узлах, обозначенных кружочками, элементы И 40, 41 будут открыты и потенциал с них откроет соответствующие ключевые транзисторы 42, 43, которые, в свою очередь, возбудят соответствующие управляющие входы 6 и 7 матрицы 4 фиксации запросов. С этого момента формируются поочередно сигналы на тактируемых входах 10; 11 и 12 на всех модулях 50-58 коммутационной системы, При этом после формирования сигнала на тактируемом входе.10 запоминаются все возможные каналы между возбужденными управляющими входами 6 и 7 в матрицах 4 фиксации запросов каждого модуля 50 - 58.Действительно, в узлах 14 фиксации...
Модуль интегрирующей вычислительной структуры
Номер патента: 1101821
Опубликовано: 07.07.1984
Автор: Криворучко
МПК: G06F 7/64
Метки: вычислительной, интегрирующей, модуль, структуры
...узел выделения выходных приращений, первый и второй узлы масштабирования, причем первый и второй выходы коммутатора соединены соответственно с входом регистра настройки и входом первого узла масштабирования цифрового интегратора, З 5 а входы коммутатора соединены с ши:ной выбора процессора, шиной начальных данных и шиной сброса, выходы регистра настройки соединены соответственно с входом узла входных комму О таторов и первым входом узла выходных коммутаторов, второй вход которого подключен к выходу узла выделения выходных приращений цифрового интегратора, группа входов узла входных коммутаторов соединена с четырьмя шинами входных приращений, а выходы подключены соответствено к входам второго узла масштабирования и узла...
Блок функциональных модулей

Номер патента: 1746552
Опубликовано: 07.07.1992
Авторы: Диденко, Кузьмин, Ручинский, Харченко, Хромов
Метки: блок, модулей, функциональных
...содержит схему распознавания адреса, перляющей шиной и снабжен дополнительным многоконтактным разъемом, Одна часть этого разъема закреплена на модуле и одним концом соединена со схемой распознавания адреса. На ответной части разъема размещен задатчик кода адреса, контакты которого соединены со схемой распознавания адреса через контакты разъема. Задатчик кода адреса может быть размещен на ответной части как с внешней ее стороны,так и с внутренней, обеспечивая возможность установки ее или на несущей конструкции или на модуле.На фиг.1 показана злектромеханическая схема устройства; на фиг.2 - то же, аксонометрия основного и дополнительно" го многоконтактных разъемов; на фиг,4 - то же, дополнительного многоконтактного разъема; на фиг,5 -...
Блок формирования модуля

Номер патента: 1536473
Опубликовано: 15.01.1990
Автор: Березовский
МПК: H01H 83/20, H02H 3/40
Метки: блок, модуля, формирования
...вход,ток от источника тока, проходя через диод 5, резисторы 6 и 7, создает на неинвертирующем входе усилителя 2 некоторое некоторое напряжение вследствие чего на резисторе 11 возникает .такое же напряжение. Выходящий из инвертирующего входа усилителя 2 ток проходит через резистор 11 и его практически компенсирует ток, проходя" щий в инвертирующий вход усилителя 2 через нелинейный элемент 9 и резистор 10.536473 6 раз (где и с /К(с 2 п, п = 4),компенсирующее напряжение 32 (фиг.2 в).Напряжение 32, складываясь с напряжением 30 второй гармоники, возникающим также без сглаживания (фиг 2 а),образует указанное выходное напряжение 31 второй гармоники, возникающее при наличии сглаживания (фиг .2 б),Положительные полуволны напряжения32...
Устройство для калибровки элемента контактной системы коммутационного аппарата

Номер патента: 1429184
Опубликовано: 07.10.1988
Автор: Шибанов
МПК: H01H 11/04, H01H 49/00
Метки: аппарата, калибровки, коммутационного, контактной, системы, элемента
...провала контактов при заданном контактном давлении,Устройство работает следующим об- Зрразом.Элемент контактной системы подается в позицию калибровки (например,Револьверным диском),От кулачка 32 приводится В движе 35ние пиноль 29, и прикрепленный к нейприжим 33 фиксирует положение элемента в тех местах, в которых онафиксируется в коммутационном аппарате.40Затем от кулачка 21 и пружины (непоказана) поворачивается вал 6, уголповорота которого ограничиваетсяупором 25. При этом находящийся нагрузе контакт 11 воздействует на контакт 12 контактной пружины 13 с усилием, равным требуемому контактномудавлению. Усилие давления в устройстве задается весом груза 8 и положением ползунка 10.Контактная пружина 13 под действием этого...
Предыдущий патент: Манипулятор
Следующий патент: Манипулятор
Случайный патент: Устройство для регистрации информации