Дифференциальная следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 732801
Автор: Винниченко
Текст
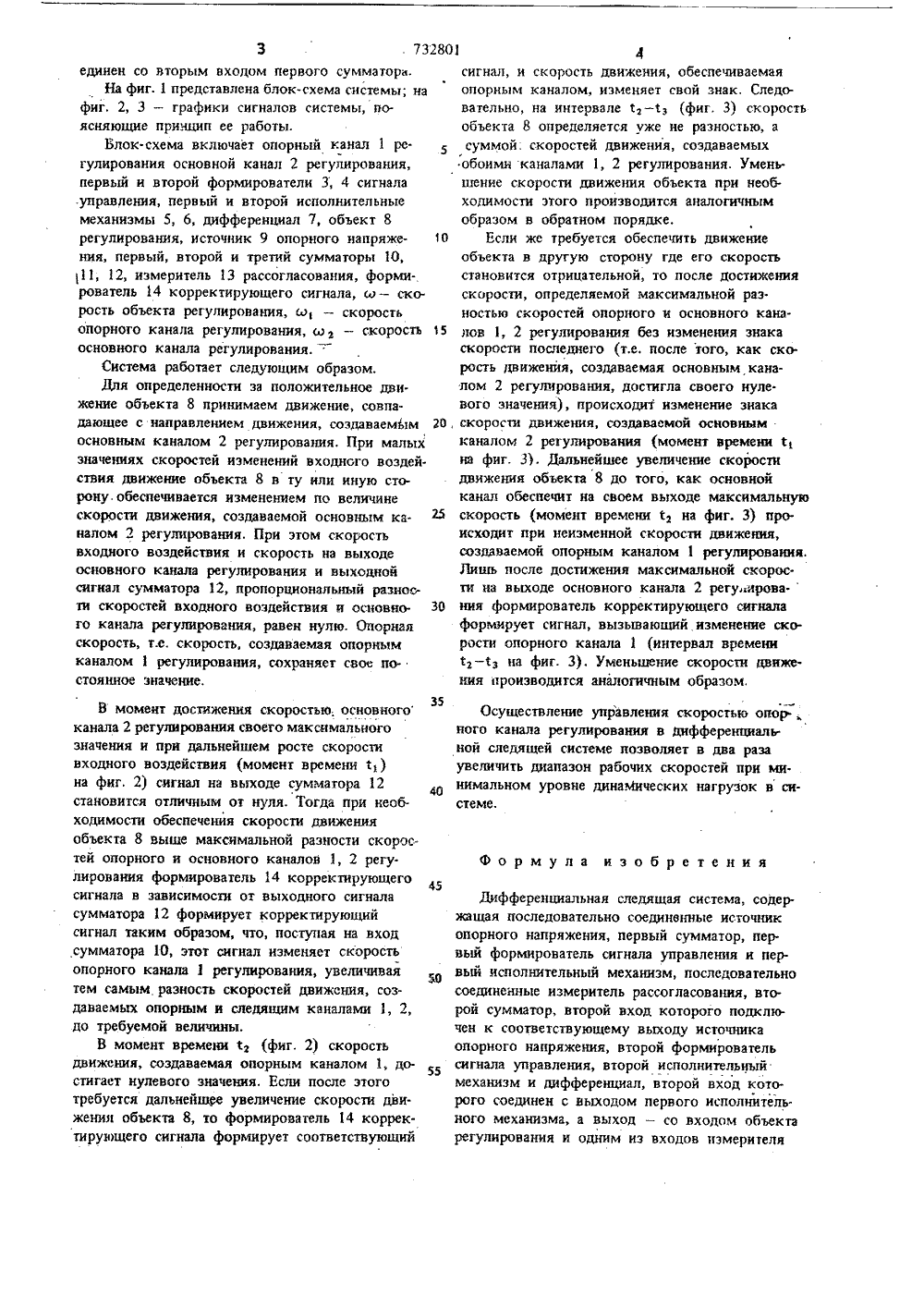
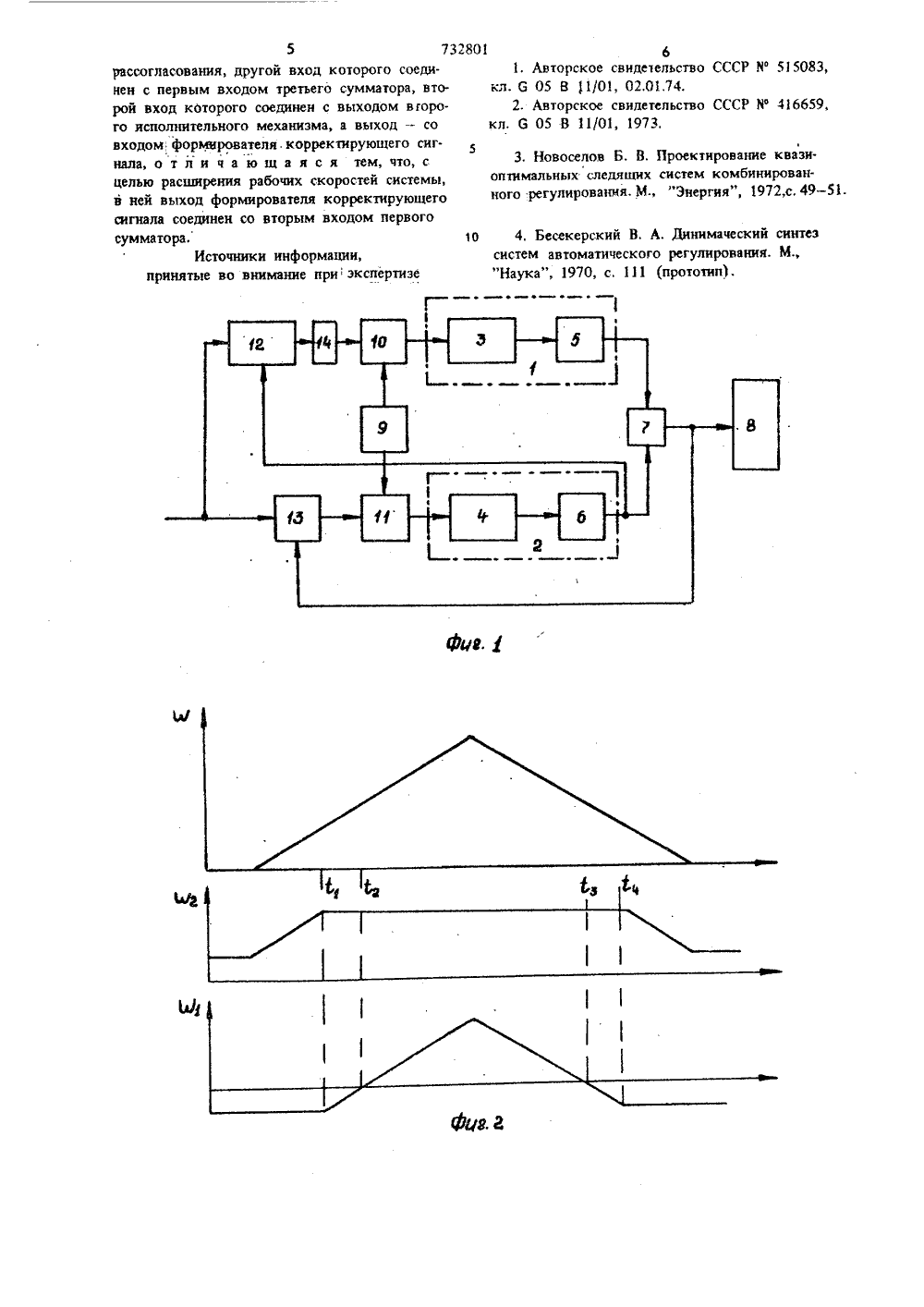
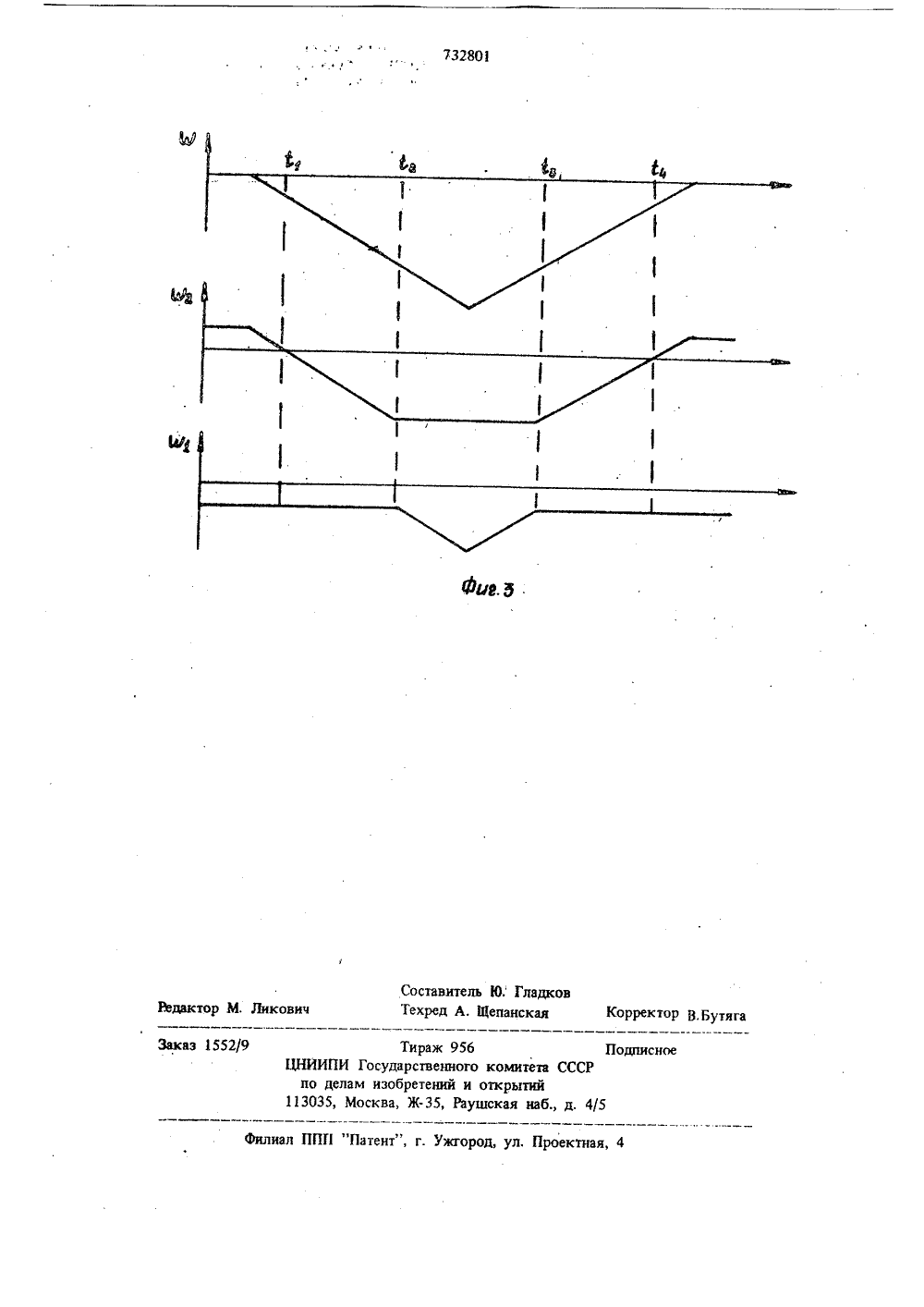
1СА ИЕ Союз СоветскнхСоциалистическихРеспублик э 1732801(23)Приоритет Опубликовано 05.05.80. Бюллетень17 до делам изобретений н открытий(088.8) Дата опубликования описания 05.05,80Изобретение относится к автоматическомурегулированию и предназначено для управлениядвижением объектов широкого профиля,Известны дифференциальные системы, содержащие основной и опорныйканалы регулирования, источник опорного напряжения и дифференциал, движение объекта в которых обеспечивается за счет разности двух знакопостоян.ных движений, формируемых наполнительнымимеханизмами основного и опорного каналов10регулирования 1) и 2.Однако такие системы обладают невысокими динамическими характеристиками,Известны такие следящие системы в которых повышение динамических характеристик15достигается введением корректирующих связеи,соединяющих выходы измерителя рассогласования, исполнительного механизма и т.д. одного канала регулирования системы со входомформирователя сигнала управления другого20какала системы 3),Из известных систем наиболее близкой потехнической сущности является дифференциальная следящая система, солержашая последовательно соединенные источник опорного напряжения, первый сумматор, первый формирова. тель сигнала управления и первый исполнитель. ный механизм, последовательно соединенные измеритель рассогласования, второй сумматор. второй вход которого подключен к соответствующему выходу источника опорного напряже. ния, второй формирователь сигнала управления, второй исполнительный механизм и дифференциал, второй вход которого соединен с выходом первого исполнительного механизма, а выход - со входом объекта регулирования и одним из входов измерителя рассогласования, друтой вход которого соединен с первым входом третьего сумматора, второй вход которого соединен с выходом второго исполнительного механизма, а выход - со входом форми. рователя корректирующего сигнала 4) .Недостаток известной системы - узкий диапазон рабочих скоростей.Цель изобретения - расширение диапазона рабочих скоростей системы.Цель достигается тем, что в системе выход Формирователя корректирующего сигнала соединен со вторым входом первого сумматора.На фиг. 1 представлена блок-схема системы; на фиг. 2, 3 - графики сигналов системы, поясняющие принцип ее работы.Блок. схема включает опорный канал 1 ре. гулирования основной канал 2 регулирования, первый и второй формирователи 3; 4 сигнала .управления, первый и второй исполнительные механизмы 5, 6, дифференциал 7, объект 8 регулирования, источник 9 опорного напряже ния, первый, второй и третий сумматоры 10, 11, 12, измеритель 13 рассогласования, формирователь 14 корректирующего сигнала, со - скорость объекта регулирования, ы, - скорость опорного канала регулирования, со э - скорость 15 основного канала регулирования.Система работает следующим образом.Для определенности за положительное движение объекта 8 принимаем движение, совпадающее с направлением движения, создаваемйм 20 основным каналом 2 регулирования. При малых значениях скоростей изменений входного воздействия движение объекта 8 в ту или иную сто. рону обеспечивается изменением по величине скорости движения, создаваемой основным каналом 2 регулирования. При этом скорость входного воздействия и скорость на выходе основного канала регулировании и выходной сигнал сумматора 12, пропорциональный разно ти скоростей входного воздействия и основно- ЗО го канала регулирования, равен нулю. Опорная скорость, т.е, скорость, создаваемая опорным каналом 1 регулирования, сохраняет свое постоянное значение.35В момент достижения скоростью, основного канала 2 регулирования своего максимального значения и при дальнейшем росте скорости входного воздействия (момент времени т,) на фиг, 2) сигнал на выходе сумматора 12 становится отличным от нуля. Тогда при необходимости обеспечения скорости движения объекта 8 выше максимальной разности скорос. тей опорного и основного каналов 1, 2 регу. пирования формирователь 14 корректирующего сигнала в зависимости от выходного сигнала сумматора 12 формирует корректирующий сигнал таким образом, что, поступая на вход сумматора 10, этот сигнал изменяет скорость опорного канала 1 регулирования, увеличивая тем самым, разность скоростей движения, создаваемых опорным и следящим каналами 1, 2, до требуемой величины.В момент времени та (фиг. 2) скорость движения, создаваемая опорным каналом 1 достигает нулевого значения. Если после этого требуется дальнейшее увеличение скорости дви женил объекта 8, то формирователь 14 корректирующего сигнала формирует соответствующий сигнал, и скорость движения, обеспечиваемая опорным каналом, изменяет свой знак. Следовательно, на интервале т, - т, (фиг, 3) скорость объекта 8 определяется уже не разностью, а суммой. скоростей движениясоздаваемых обоими каналами 1, 2 регулирования. Уменьшение скорости движения объекта при необходимости этого производится аналогичным образом в обратном порядке.Если же требуется обеспечить движение объекта в другую сторону где его скорость становится отрицательной, то после достижения скорости, определяемой максимальной раэ. постыл скоростей опорного и основного каналов 1, 2 регулирования без изменения знака скорости последнего (т,е, после того, как скорость движения, создаваемая основным каналом 2 регулирования, достигла своего нуле. ного значения), происходит изменение знака скорости движения, создаваемой основным каналом 2 регулирования (момент времени т, на фиг. 3). Дальнейшее увеличение скорости движения объекта 8 до того, как основной канал обеспечит на своем выходе максимальную скорость (момент времени т на фиг. 3) происходит при неизменной скорости движения, создаваемой опорным каналом 1 регулирования. Лишь после достижения максимальной скорое. ти на выходе основного канала 2 регу прова.ния формирователь корректирующего сигнала формирует сигнал, вызывающий изменение скорости опорного канала 1 (интервал времени т, - тна фиг. 3). Уменьшение скорости движения производится аналогичным образом,Осуществление управления скоростью опорного канала регулирования в дифференциаль. ной следящей системе позволяет в два раза увеличить диапазон рабочих скоростей при минимальном уровне динаМических нагрузок в системе.Формула изобретенияДифференциальная следящая система, содержащая последовательно соединенные источник опорного напряжения, первый сумматор, пер. вый формирователь сигнала управления и первый исполнительный механизм, последовательно соединенные измеритель рассогласования, второй сумматор, второй вход которого подключен к соответствующему выходу источника опорного напряжения, второй формирователь сигнала управления, второй исполнительный механизм и дифференциал, второй вход которого соединен с выходом первого исполнительного механизма, а выход - со входом объекта регулирования и одним иэ входов иэмерителя732801 рассогласования, другой вход которого соединен с первым входом третьего сумматора, второй вход которого соединен с выходом вгорого исполнительного механизма, а выход - совходом, форьщрователя. корректирующего сигнала, о т л и ч а ю щ а я с я тем, что, сцелью расширения рабочих скоростей системы,в ней выход формирователя корректирующегосигнала соединен со вторым входом первогосумматора,Источники информации,принятые во внимание нри экспертизе 6 1. Авторское свидетельство СССР Мф 515083,кл. (3 05 В 11/01, 02,01,74. 2. Авторское свидетельство СССР йф 41 б 659,кл. 6 05 В 1/01, 1973.53, Новоселов Б. В. Проектирование квазиоптимальных следящих систем комбинированного регулирования М, "Энергия", 1972,с, 49-51. 10 4, Бесекерский В, А. Динимаческий синтез систем автоматического регулирования. М., "Наука", 1970, с. 111 (прототип).7328 О 1 Составитель Ю. Гладк Техред А, Щепанская р М. Ликови ректор В.Бутяг Заказ 1552/9 слое филиал ППП Патент", г. Ужгород, ул. Проектная Тираж 956 ЦНИИПИ Государственного по делам изобретений и 113035, Москва, Ж, Раукомитета СССР открытий шская наб., д. 4
СмотретьЗаявка
2095272, 07.01.1975
Заявитель
ВИННИЧЕНКО ВЛАДИМИР МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: дифференциальная, следящая
Опубликовано: 05.05.1980
Код ссылки
<a href="https://patents.su/4-732801-differencialnaya-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Дифференциальная следящая система</a>
Устройство для автоматического изменения скорости перемещения опорных роликов в кольце-прокатного стана

Номер патента: 596346
Опубликовано: 05.03.1978
Автор: Блиничкин
МПК: B21H 1/06
Метки: изменения, кольце-прокатного, опорных, перемещения, роликов, скорости, стана
...оси шарниров 14 и 15 подвижно закрепленыв каретке 1. Ось шарнира 16, расположенного на второй диагонали ромба, закреплена неподвижно, а ось шарнира 17 связанас основным следящим роликом 6.Связь оси шарнира 17 с основным следящим роликом выполнена в виде следягцей системы. На чертеже показана электрогидравлическая следяшая система, выполненная в видегидроцилиндра 8, шток которого соединен сосью шарнира 17. Гидроцилиндр 18 снабженследящим золотником 19, состоящим из установленных на подводе к полостям гидроцилиндра 18 жиклеров и сливны.х сопл с электроуправляемой заслонкой. Следящий золотник19 через блок управления 20 соединен с датчиком.21 положения основного следящего ролика :относительно оси шарнира 17, Ролик 6установлен подвижно...
Устройство для передачи сигнала от неподвижного объекта к объекту перемещающемуся по спирали

Номер патента: 647787
Опубликовано: 15.02.1979
Авторы: Волков, Федорчук, Швинд, Шуховцев
МПК: H01R 39/64
Метки: неподвижного, объекта, объекту, передачи, перемещающемуся, сигнала, спирали
...узлом, который сосгонт цз статора 2 ц ротора 3. Ста.,),(,)К 17Гири, )22 1;)тиит, г, Уес) срс:, у.Ь .ии 1 исс11 рс т)1 зя тр ц )сдстсг Вляст собой,)и(к ыз 1(. (1 Г). ЦРгг )ЛЯЦЕРГ М;ПСРЦДЛД С ЦЦ, т)С Ц(Ц13 тс). Ьи)проводя;цимц (3(цпями 4 1 м. фиг. 2), Г Д Л Ь В 3 Н И ( С С К И С В 5 3 с 1 Н и Ь М Ц ; и О Н 1 сКТ 13 Ы М и з.гсмснтами к(2 льг(ям) 5 См. иг 1 и 2, РЯСиЛОЖЕЦНЫМЦ Н ЦЯЗДХ ЛИСКЯ К 111(НТРИ(. О Олин тггоситсл ьгг(2 л)( Г)"о. 1)( Гор яг). .151 тся )ЕС ко,Ес р жяР,(мвы пол 1(ц ь Ви,1 с диска из неэлектроцроводцого ггдтсриятя, в азах ктороО ндход 5 пся коцтдктггы(." ЗГ 1 Р. гнты Кольеа) 6 (см фиг, 1 и 8). 1, кон- тдКтНЫМ КОЛЬцаМ 6 жЕСтКИ црцКрЕЛРНЫ уцрмтге контакты 7, которые упираклся в КОНТ 3 КТНЕР КОЛЬ(а Э СТс 1 ТОР(1 2....
Формирователь сигнала опорной частоты

Номер патента: 1085003
Опубликовано: 07.04.1984
МПК: H04L 7/02
Метки: опорной, сигнала, формирователь, частоты
...подключенк входам второй дифференцирующей цепи и инвертора, выход которого через.третью дифференцирующую цепь подклю,чен к второму входу элемента ИЛИ. 5 ОНа Фиг, 1 приведена структурнаяэлектрическая схема формирователясигнала опорной частоты; на Фиг,2 -временные диаграммы его работы.Формирователь сигнала опорной час 55,тоты содержит дифференцирующие цепи1-3 элемент ИЛИ .4, Й-триггер 5,элемент б задержки, инвертор 7.формирователь сигнала опорнойчастоты работает следующим образом,На вход формирователя поступаетнерегулярная цифровая последовательность (Фиг. 2 а , но передним фронтамкоторой на выходе первойдифФеренцирующей цепи 1 формируются короткие импульсы (фиг.2,6 (, поступающие через элемент ИЛИ 4 ( Фиг.2 в на первый вход...
Устройство для компенсации переносного движения в системе совмещенного следящего управления

Номер патента: 135418
Опубликовано: 01.01.1961
Авторы: Беркман, Буланов, Екворцов, Катюхин
Метки: движения, компенсации, переносного, системе, следящего, совмещенного
...1 движение передается тросиком или цепью с блока 2 блоку-венцу 3 и от него через зубчатое колесо 4 зубчатым колесам 5 и 6, закрепленным на общей втулке,При неподвижном рычаге 7 управления стрелой жестко связанный с нимвенец 8 также неподвижен и вращение получают только сателлит 9,водило и блок 10, командующий распределителем движения ру кояти сковшом. Углы поворота элементов и водила при этомбудут 2 - я;3 63 -- а; 5 -- и; водила - а.22135418При повороте рычага 7 управления стрелой блок 11 будет командовать распределителем движения стрелы. Венец 8, жестко связанный с блоком 11, и блок-венец д повернутся на один и тот же угол, Блок-венец 8 передает движение зубчатому колесу 4, ось которого неподвижна, и зубчатому колесу б, жестко...
Устройство для регистрации подвижных объектов в зависимости от скорости движения

Номер патента: 550669
Опубликовано: 15.03.1977
Автор: Керемжанов
МПК: G08G 1/08
Метки: движения, зависимости, объектов, подвижных, регистрации, скорости
...эталонного инверсного уровня 4 управляемый источник напряжения инверсной полярности по отношению к входным сигналам, в качеспве сумматора б - электронный аналоговый сумматор инверсного эталонного и преобразованного на модели- аналоге сигналов.Перспективно также использование запоминающей элвктронно-лучевой трубки с несколькими электронными прожекторами, один из которых реализует канал с использованием датчика эталонного инверсного уровня 4, формирующего сигналы инверсного электронного уровня, а элемент 5 может быть реализован дополнительным электродом, запирающим путь сигналом датчика 4 при наличии синхронного считываемого сипнала с,модели- аналога, Элемент 5 может быть реализован и катушкой электромагнитного управления с...
Предыдущий патент: Привод
Следующий патент: Электрогидравлический следящий привод
Случайный патент: Машина непрерывного литья металлов наклонного или горизонтального типа