Устройство для компенсации переносного движения в системе совмещенного следящего управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
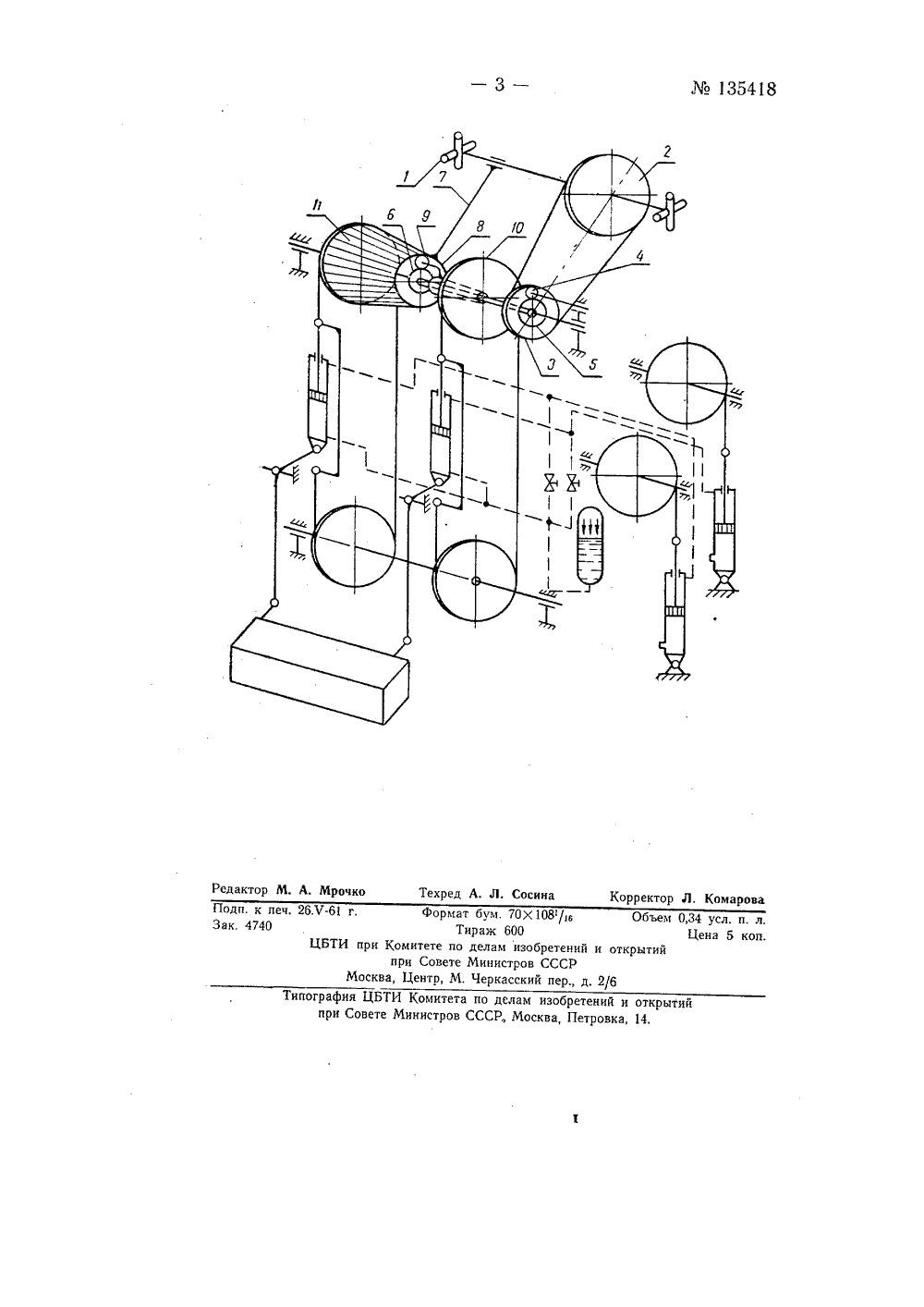
;ПИСАНИЕ ИЗОБРКтКНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Подписная группа Л 27 ан, А. А, Буланов и Б. П, Катюхин ПЕНСАЦИИ ПЕРЕНОСНОГО ОВМЕЩЕННОГО СЛЕДЯЩЕГОУПРАВЛЕНИЯ Г, С, Ск УСТРО ДВИЖЕН ворцов, И, Л. Беркм ЙСТВО ДЛЯ КОМ ИЯ В СИСТЕМЕ С преля 1960 г. забб 463/29 в Комитет по делам изобретений и открытий при Совете Министров СССР аявлено 25 Опубликован Бюллетене изобретений2 за 9 б г. Известна схема устройства для компенсации переносного движенияв системе совмещенного следящего управления рабочим оборудованиемодноковшового экскаватора и других машин. Эта схема выполнена наоснове гидравлической связи между элементами управления гидравлической компенсации переносного движения,Предлагаемая схема отличается тем, что, с целью компенсации влияния перемещения любого из элементов на движение другх элементов.в ручное управление включены рабочие элементы, спаренные эпициклическими передачами, в которых угловое перемещение водила одной передачи компенсируется направленным в обратную сторону угловым перемещением солнечной шестерни.Предлагаемая схема механической компенсации дает возможносгьупростить линии обратных связей, повышает чувствительность управления благодаря замене упругих гидравлических компенсаторов жесткимимеханическими и делает ненужной регулировку системы компенсации.На чертеже изображена принципиальная схема устройства механической компенсации переносного движения в системе совмещенного следящего управления применительно к рабочему оборудованию экскавато.ра (стрела и рукоятка с неповоротным ковшом).При повороте ручки управления рукоятью ковшом 1 движение передается тросиком или цепью с блока 2 блоку-венцу 3 и от него через зубчатое колесо 4 зубчатым колесам 5 и 6, закрепленным на общей втулке,При неподвижном рычаге 7 управления стрелой жестко связанный с нимвенец 8 также неподвижен и вращение получают только сателлит 9,водило и блок 10, командующий распределителем движения ру кояти сковшом. Углы поворота элементов и водила при этомбудут 2 - я;3 63 -- а; 5 -- и; водила - а.22135418При повороте рычага 7 управления стрелой блок 11 будет командовать распределителем движения стрелы. Венец 8, жестко связанный с блоком 11, и блок-венец д повернутся на один и тот же угол, Блок-венец 8 передает движение зубчатому колесу 4, ось которого неподвижна, и зубчатому колесу б, жестко связанному с зубчатым колесом б. Зубчатое колесо б передает вращение сателлиту 9, который получает вращение в ту же сторону и от венца 8, Углы поворота сателлита 9 со стороны венца 8 и со стороны блок-венца 8 равны, следовательно, водило и блок 10 останутся неподвижными.Таким образом обеспечивается независимое управление каждым из элементов, При одновременном движении ручки управления рукоятью с ковшом 1 и рычага 7 управления стрелой осуществляется совместное управление двумя шарнирно связанными элементами в одной плоскости. Механическая компенсация по предлагаемой схеме может быть применена при любом количестве шарнирно связанных элементов.Предмет изобретенияУстройство для компенсации переносного движения в системе совмещенного следящего управления одновременно несколькими кинематически связанными рабочими элементами, например, одноковшового экскаватора, отличающееся тем, что, с целью компенсации влияния перемещения любого из элементов на движение других элементов, оно снабжено включенными в ручное управление рабочими элементами, спаренными эпициклическими передачами, в которых угловое перемещение водила одной передачи компенсируется направленным в обратную сторону угловым перемещением солнечной шестерни.Редактор М. А. Мрочко Корректор Л. Комарова Техред А. Л. Сосина Формат бум. 70 Х 108/и Тираж 600 ЦБТИ при Комитете по делам изобретений и открытий при Совете Министров СССР Москва, Центр, М, Черкасский пер д. 2/6Подп, к печ. 26 Хг Зак. 4740 Типография ЦБТИ Комитета по делам изобретений и открытий при Совете Министров СССР, Москва, Петровка, 14,
СмотретьЗаявка
664613, 25.04.1960
Беркман И. Л, Буланов А. А, Екворцов Г. С, Катюхин Б. П
МПК / Метки
Метки: движения, компенсации, переносного, системе, следящего, совмещенного
Опубликовано: 01.01.1961
Код ссылки
<a href="https://patents.su/3-135418-ustrojjstvo-dlya-kompensacii-perenosnogo-dvizheniya-v-sisteme-sovmeshhennogo-sledyashhego-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для компенсации переносного движения в системе совмещенного следящего управления</a>
Система группового автоматического управления мощностью энергоблоков тепловой электростанции

Номер патента: 1053221
Опубликовано: 07.11.1983
Авторы: Качан, Коробский, Кулаков, Москаленко
МПК: H02J 3/46
Метки: группового, мощностью, тепловой, электростанции, энергоблоков
...действительные значения мощности, и выдачей неполного сигнала рассогласования в блок 2 отработки общего задания. Кроме того, блок 1 задания служит для определения и формирования. сигнала начала коррекции путем сравнения действительных значений мощности с заданными, передачи сигналов изменения мощности и начала коррекции, а также для приема сигнала конца коррекции (К) . Первый вход блока 1 задания связан с системой управления мощностью более высокого ранга (как правило телетайпной ,связью) . Блок 2 отработки общего задания, выход которого подключен к входу следяшезапоминаюшего блока 3, предназначен для формирования ПИ-закона регулирования мощности для энергоблоков в нормальном режиме эксплуатации или ПИД-закона - в предаварийном...
Генератор арккосинусоидального опорного напряжения для системы импульсно-фазового управления

Номер патента: 1163432
Опубликовано: 23.06.1985
Автор: Романков
МПК: H02M 1/08
Метки: арккосинусоидального, генератор, импульсно-фазового, опорного, системы
...и может быть использовано в автоматизированных электроприводах, системах регулирования температуры, освещения,Цель изобретения - повышение точности аппроксимации и расширение периода арккосинусоидального опорного напряжения.На фиг. 1 приведена общая схема системы импульсно-фазового управления с генератором опорного напряжения арккосинусоидальной формы; на фиг. 2 - диаграммы работы системы.Система содержит синхронизирующий блок 1, соединенный с базой коммутирующего транзистора 2, коллектор которого подключен через переменный резистор 3 к 15 источнику питания и соединен с стабилитроном 4, первым формирующим конденсатором 5, с вторым формирующим конденсато-. ром 6 через цепочку, состоящую из параллельно включенного диода 7 в...
Опорные элементы блока тарелок массообменного аппарата

Номер патента: 1309998
Опубликовано: 15.05.1987
Авторы: Борисенко, Кравченко, Матюхин, Неретин, Цепанов, Чирикашвили
МПК: B01D 3/32
Метки: аппарата, блока, массообменного, опорные, тарелок, элементы
...фц 1. 3; ця фиг. 5 -- вид В ця фиг. 3; ца фиг. 6 последовагсльцость установки полурам тарелок.Оцорцые элемсцты 0;Ока тарелок фцг.и 2) сос 0 т цз оцорцых ш)лурами ., вкцочя 101 цРх уголки 3, 1 цвсллсры 4, юлуколь. цс 1 Э, Кропи)1 СИНЫ О. 10)1 КОЛ,1(с 5 ГярсГ)ОК (ООРс 1:1 Ь И СБЗРСЦЬ 1 СОБМССТНО С ЕРО 1 - итейцямц 6, образуя о Гчс. ц с узлы (фиг. 3), и имеют возможность персмсГцаться вдоль вертикальных полок уголков 3 и цвеллероц 4. Полурамыи 2 опорцых эгех(НтОБ сцзожсць 1 клиць 51.1 и ( и 8, Опорцые цовсрхцости 9 и 10 которых находятся в одной плоскости с опорной поверхностью 11 полуколец 5 ц опорцыми поверхцостямц 12 и 13 уголков 3 и ц)вслгеров соответственно.Техно ОгисескРй зазор 5 фиг. 4), Необходимый для непрерывного перемецеция...
Система для автоматического управления группами аппаратов циклического действия

Номер патента: 822661
Опубликовано: 15.07.1982
Авторы: Алешечкин, Бабаянц, Диденко, Опришко, Рабинович, Ханукаев, Чернер
МПК: G05D 27/00
Метки: аппаратов, группами, действия, циклического
...причем каждой операции соответствует определенная комбинация положения исполнительных механизмов, определяемая программой управления. Включение блока 31 осуществляется по информации об окончании выполнения цикла от блока 38, переход от текущей операции к последующим - по информации о достижении давлением регламентных границ от блока 29 и информации от блока автономного управления 39.Блок 32 управления стерилизацией обеспечивает выполнение заданной последовательности операций нагрева аппарата, выдержки, степилизации трубопооводов и охлаждения. При этом осуществляется управление исполнительными механизмами, включение регулирования температуры и давление стерилизации. Включение блока 32 осуществляется по информации об окончании...
Система крепления элементов котла

Номер патента: 1449761
Опубликовано: 07.01.1989
Автор: Гатицкий
МПК: F22B 37/24
Метки: котла, крепления, элементов
...предлагаемой системой креплений его элементов происходит следующим образом.В процессе пуска котла его газо- плотный экран разогревается и начина" ет расширяться, перемещаясь в, горизонтальной плоскости в направлении от центра масс (Ц.М.), при этом трубные панели 3 совершают перемещение вдоль оси горизонтальных балок 2 и вместе с ними перемещаются и вертикальные 45балки 1 с косынками 5, совершая плоско-параллельное движение но окружности с радиусом равным длине тяг 6,При возникновении сейсмических или ветровых нагрузок на экран эти нагрузки в виде горизонтальных усилий Р, действующих вдоль трубных панелей 3, передаются на вертикальныебалки 1, закрепленные на металлоконструкциях котла или здания, в которых возникают силы реакции Й,...
Предыдущий патент: Устройство для измерения степени наполнения черпаков многоковшовых землечерпательных машин
Следующий патент: Концевой понтон плавучего грунтопровода-земснаряда
Случайный патент: Устройство для магнитно абразивной обработки