Интерполятор для систем программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
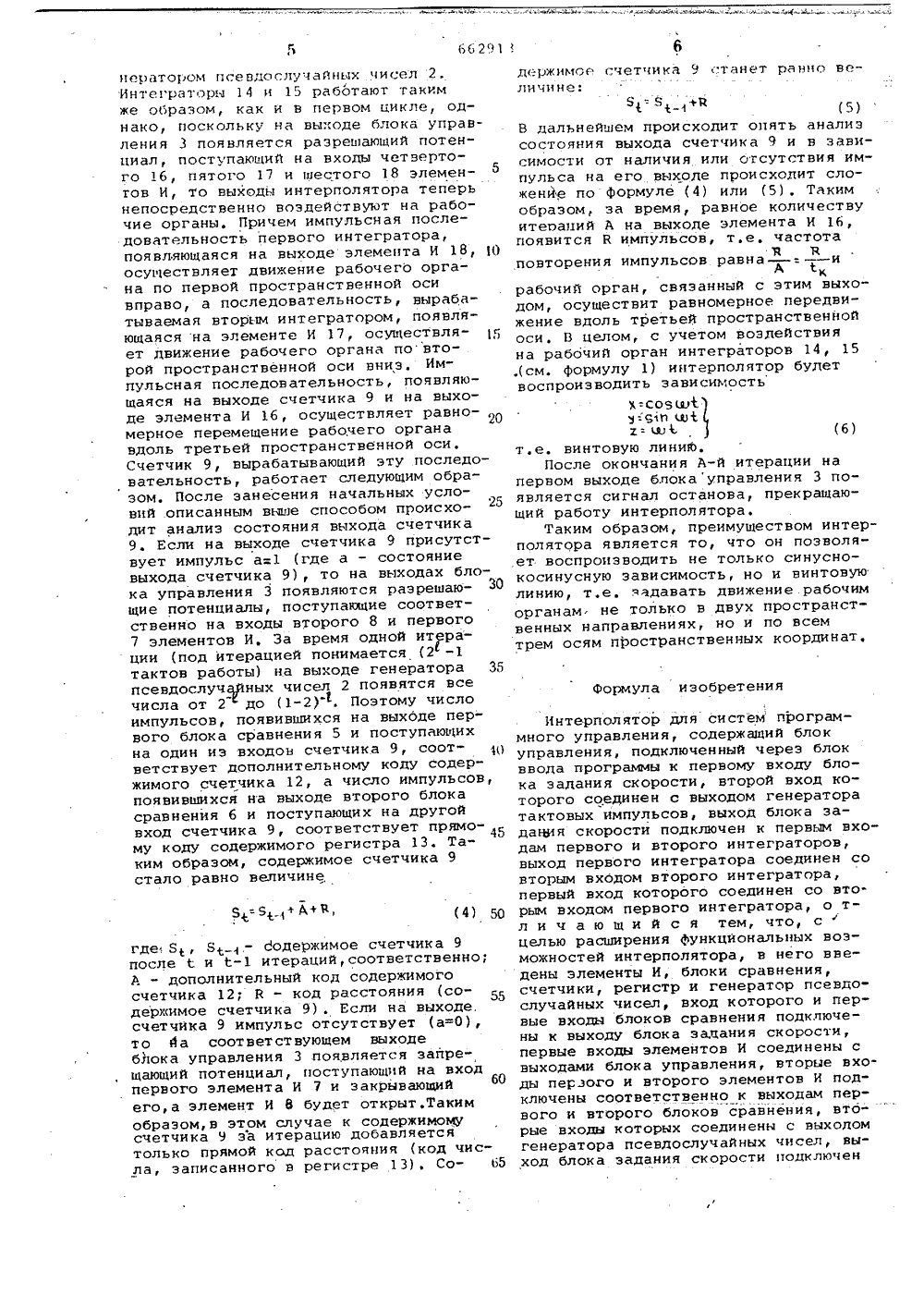
)2455331/18-24 19 18 сударстве нный ком ите СССР о делам изобретений и открытий) УДК 621.503 . 55,(088. 8 плетень М 18 Опубликовано 15.0 5.7 Дата опубликования исания 18.05.79 Я, Кузьмин, НГ, В, Добрис(54) ИНТЕРПОЛЯТ ИСТЕК ПРОГРАММНОГО УПРАВЛЕНИ перымвы(22) Заявлено 220277 (2 с присоединением эаявк Изобретение относится к области вычислительных устройств систем управления и может быть испольэовано в системах числового программного управления станками и другим технологи 5 ческим оборудованием.Известны интерполяторы для воспроизведения синусно-косинусной зависимости, построенные по принципу цифровых дифференциальных анализаторов Е 1 Ъ Г 2)аНаиболее близким техническим решением к данному изобретению является интерполятор для систем программного управления, содержащий блок управления, подключенный через блок ввода программы к первому входу блока задания скорости, второй вход которого соединен с выходом генератора тактовых импульсов, выход блока задания скорости подключен к первым входам первого и второго интеграторов, выходрвого интегратора соединен со втовходом второго интегратора, перй вход которого соединен со вторым входом первого интегратора 3,НедостаткОм такого интегратора является ограниченность функциональных 30 возможностей, так как он может восмирнов, В, В, Яковлев Пашенцев производить только синусно-косинуснуюзависимость.Целью изобретения является расширение функциональных возможностей, заключающееся в возможности воспроизведения винтовой линии,Поставленная цель достигается тем,что в интегратор введены элементы И,блоки сравнения, счетчики, регистр игенератор псевдослучайных чисел, входкоторого и перные входы блоков сравнения подключены к выходу блока задания скорости, первые входы элементовИ соединены с выходами блока управления, вторые входы первого и второгоэлементов И подключены соответственнок выходам первого и второго блоковсравнения, вторые входы которых соединены с выходом генератора псевдослучайных чисел, выход блока задания скорости подключен ко второму входу тре"тьего элемента И, выход которого соединей с первым входом первого счетчика, выход блока ввода программы подключен к .третьим входам первого и второго интеграторов, ко входу регистра,ко второму входу первого счетоика ик первому входу второго счетчика, второй и третий входы которого подсоединены к выходам первого и второго элементов И соответственно, а выход - к"перному .входу блока управления и ко " второму входучетвертого элемента И,вторые входы пятого и шестого элементов И соединены соответственно с первым выходом второго интегратора и свыходом первого интегратора, а выходперного счетчика, выход регйстра ивторой выход второго интегратора под-ключены к третьему входу первого блока сраннения, третьему входу второгоблока сравнения и ко второму входу блока управления соответственно,Блок-схема интерполятора представ лена на чертеже и содержит блок ввода проГраммы 1, генератор псевдослучайных чисел 2, блок управления 3,15 блок задания скорости 4, первый 5 и,второй 6 блоки сравнения, первый 7 ивторой 8 элементы И,второй счетчик 9,генератор тактовых импульсов 10, третий элемент И 11, перзый счетчик 12,регистр 13, первый 14 и второй 15 интеграторы, четвертый 16, пятый 17 и шестой 18 элементы И .Интерполятор работает следующим образом.25По сигналу, поступающему от блока управления 3 к блоку 1, в первый 14 и второй 15 интеграторы по шине 26 от блока 1 заносятся начальные условия. По сигналу, вырабатываемому на другом выходе блока 1, тактовая последоватЕльнОсть импульсов, вырабатываемаягенератором тактовых импульсов 10, преобразуется блоком задания скорости 4 в требуемую, и, поступая на их входы, задает скорость работы 35 интеграторов 14 и 15, В это время на входе третьего элемента И 11 присутствует разрешающий потенциал, вырабатываемый на ныходе блока управления 3 и поступающий на вход элемента И 11, импульсы от блока задания скорости 4 начинают посту 1 ать с выхода элемента И 11 на вход счетчика 12, Остальные элеМенты И - 7, 8, 16, 17 и 18 закрыты: на их первйх входах присутствуют запрещающие потенциалы, посТупающие с соответствующих выходов блока управления 3, Первый 14 и второй 15 интеграторы воспроизводят синусно-косинусную зависимость н соответстнии с выражениемх=соя Озс, у= чююС, (1) ,где х и у - содержимое интеграторов 40 14 и 15; соответственно, рассматриваембе.,как число с запятой, Фиксированной перед старшими разрядами, Эти величины могут рассматриваться и какчастота появления импульсов на выхо 60 65 дах интеграторов в дискретные моменты времейи С, задаваемые блоком задания скорости 4, ю 2 коэффициент, учитывающий разрядность 1 йнтеграторов, Как только текущее значение станет равным заданной конечной коор"динате, на "втором выходе второго интегратора 15 появляется сигнал, поступающий ца вход блока управления з,По этому сигналу вырабатывается сигнал цЙ выходе блока управления 3, который описанным вышепособом устанавливает интеграторы 14 и 15 в перноцачальное состояние, На другом выходеблока управления 3 появляется запрещающий потенциал, поступающий на первый вход элемента И 11, который прекращает запись импульсов в счетчик12 и содержимое счетчика 12 станетравным времени работы интеграторов14 и 15.(2)где Л - содержимое счетчика 12;время работы интеграторов 14,15. На этом первый цикл работы устройства заканчивается,Во втором цикле работы, цикле работы по сигналу, вырабатываемому напервом выходе блока управления 3, который поступает на вход блока 1, в,регистр 13 заносится числовой код,соответствующий расстоянию, котороедолжен пройти рабочий орган в горизонтальном напранпении Н, По этому жесигналу содержимое счетчика 9 устанавливается н состояниеЯ;-1-0,5 А= )-0,5 Ф (3)где Я - начальное состояние счетчиока 9,Импульсы, вырабатываемые на выходеблока задания скорости 4 и поступающие по шине, связывающей выход блоказадания скорости 4 со входом генератора псевдослучайных чисел 2 и с входами блоков сравнения 5 и б,имеютчастоту в 2 раза большую, чем импульсы, посгупающие от блока заданияскорости 4 на интеграторы 14 и 15.Это позволяет синхронизировать импульсные последовательности, появляющиеся на выходах интеграторов 14 и 15с выходной импульсной последовательностью счетчика 9,На выходах генератора псевдослучайных чисел 2, представляющего собой8 -разрядный сдвиговый регистр с линейной обратной связью, начинают появляться импульсы. Наличие импульса кодируется как логическая единица, отсутствие - как нуль, Поэтому совокупность этих бинарных символов, при разрядности генератора псевдослучайных чисел 2 представляет со)ой двоФичный цифровой код чисел от 2 до (1-2 ).ати импульсы поступают на входм первбго 5 и второго 6 блоков сравнения и сравниваются соответственно с содержимым счетчика 12 и содержимым регистра 13, При этом импульс на выходе блока 5 появляется только в случае, если двоичное число, выработанное генератором псевдослучайных чисел 2, не Меньше содержимого счетчика 12, а на выходе блока 6 - только н случае, если содержимое регистра 13 не меньше двоичного числа, выработанного ге(4) 50 нератором псевдослучайных Чисел 2, Интеграторы 14 и 15 работают таким же образом, как и в первом цикле, однако, поскольку на выходе блока управления 3 появляется разрешающий потенциал, поступающий на входы четвертого 16, пятого 17 и шестого 18 элементов И, то выходы интерполятора теперь непосредственно воздействуют на рабочие органы, Причем импульсная последовательность первого интегратора, появляющаяся на выходе элемента И 18, О осуществляет движение рабочего органа по первой пространственной оси вправо, а последовательность, вырабатываемая вторым интегратором, появляющаяся на элементе И 17, осуществляет движение рабочего органа повторой пространственной оси вниз, Импульсная последовательность, появляющаяся на выходе счетчика 9 и на выходе элемента И 16, осуществляет равно-, мерное перемещение рабочего органа вдоль третьей пространственной оси.Счетчик 9, вырабатывающий эту последовательность, работает следующим образом. После занесения начальных условий описанным выше способом происхо 25 дит анализ состояния выхода счетчика 9. Если на выходе счетчика 9 присутствует импульс а:1 (где а - состояние выхода счетчика 9), то на выходах блока управления 3 появляются разрешаю щие потенциалы, поступающие соответственно на входы второго 8 и первого 7 элементов И. За время одной итерации (под итерацией понимается (2 -1 тактов работы) на выходе генератора 35 псевдослуч 1 ных чисел 2 появятся все числа от 2 до (1-2) , Поэтому число импульсов, появившихся на выходе первого блока сравнения 5 и поступающих на один из входов счетчика 9, соответствует дополнительному коду содержимого счетчика 12, а число импульсов, появившихся на выходе второго блока сравнения 6 и поступающих на другой вход счетчика 9, соответствует прямому коду содержимого регистра 13, Таким образом, содержимое счетчика 9 стало равно величине где; Я, Я .- содержимое счетчика 9 после 1; и 1-1 итераций, соответственно; А - дополнительный код содержимого счетчика 12; В - код расстояния (содержимое счетчика 9) . Если на выходе, счетчика 9 импульс отсутствует (а=0), то Йа соответствующем выходе блока управления 3 появляется запрещающий потенциал, поступающий на вход первого элемента И 7 и закрывающий60 его, а элемент И 8 будет открыт, Таким образом,в этом случае к содержимому счетчика У эа итерацию добавляется только прямой код расстояния (код числа, записанного в регистре 13), Со 6держиморд счетчика 9 станет равно величинее; 81= й(5)В дальнейшем происходит опять анализсостояния выхода счетчика 9 и в зависимости ат наличия или отсутствия импульса на его выходе происходит сложенйе по формуле (4) или (5), Такимобразом, за время, равное количествуитераций А на выходе элемента И 16появится В импульсов, т.е. частотай Яповторения импульсов равна в : ифкрабочий орган, связанный с этим выходом, осуществит равномерное передвижение вдоль третьей пространственнойоси, В целом, с учетом воздействияна рабочий орган интеграторов 14, 15,(см. формулу 1) интерполятор будетвоспроизводить зависимость) = соэ аАя 1 п яг= цо (6)т.е, винтовую линий,После окончания А-й итерации напервом выходе блока управления 3 появляется сигнал останова, прекращающий работу интерполятора.Таким образом, преимуществом интерполятора является то, что он позволяет воспроизводить не только синуснокосинусную зависимость, но и винтовуюлинию, т,е. задавать движение. рабочиморганам не только в двух пространственных направлениях, но и по всемтрем осям пространственных координат,Формула изобретения Интерполятор для систем программного управления, содержащий блок управления, подключенный через блок ввода программы к первому входу блока задания скорости, второй вход которого соединен с выходом генератора тактовых импульсов, выход блока задащя скорости подключен к первым входам первого и второго интеграторов, выход первого интегратора соединен со вторым входом второго интегратора, первый вход которого соединен со вторым входом первого интегратора, о тл и ч а ю щ и й с я тем, что, сцелью расширения функциональных возможностей интерполятора, в него введены элементы И, блоки сравнения, счетчики, регистр и генератор псевдослучайных чисел, вход которого и первые входы блоков сравнения подключены к выходу блока задания скорости, первые входы элементов И соединены с выходами блока управления, вторые входы перзого и второго элементов И подключены соответственно к выходам первого и второго блоков сравнения, вто- рые входы которых соединены с выходом генератора псевдослучайных чисел, выход блока задания скорости подключенпервого счетчика, выход регистра ивторой выход второго интегратора подключены к третьему входу первого блока сравнения, третьему входу второгоблока сравнения и ко второму входублока управлени. соответственно. Источники информации, принятые вовнимание при экспертизе1, Дригваль Г, П, Пифровые дифференциальные анализаторы, М .Сов,радио, 1970, с. 394-396.2. Неслуховский К, С. цифровыедифференциальные анализаторы. М., Машиностроение, 1968,3, Авторское свидетельство СССРР 555381, кл. 605 В 19/18, 1975,1:,У5 6629134 фк второму входу третьего элементаИ, выход которого соединен с первымвходом первого счетчика, выход, блока.входам первого и второго интеграторов,ко входу регистра,ко второму входупервого счетчика и к первому входу 8второго счетчика, второй и третий входы которого подсоединены к выходампервого и второго элементов И соответственно,а выход - к первому входублока управления и ко второму 10входу четвертого элемента И,вторые входы пятого и шестого элементов И соединенй соответственно с первым выходом второго интегратора и свыходом первого интегратора, а выход 15редактор Заказ 26 ктная,Филиа СоставительН, Веселкина Техред Л. Ал 48Тираж 1014ЦНИИПИ Государственного кпо делам изобретений и113035 Москва ЖРаФФ:Р ППП Патент , г. Ужгород,Кошкинова Кор ектор А Подписноемитета СССРткрытийская наб д. 4/5 ен
СмотретьЗаявка
2455331, 22.02.1977
ПРЕДПРИЯТИЕ ПЯ А-3890
КУЗЬМИН ГЕННАДИЙ ЯКОВЛЕВИЧ, СМИРНОВ НИКОЛАЙ АЛЕКСЕЕВИЧ, ЯКОВЛЕВ ВАЛЕНТИН ВАСИЛЬЕВИЧ, ДОБРИС ГЕННАДИЙ ВЛАДИМИРОВИЧ, ПАШЕНЦЕВ АНДРЕЙ ИГОРЕВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/4103
Метки: интерполятор, программного, систем
Опубликовано: 15.05.1979
Код ссылки
<a href="https://patents.su/4-662913-interpolyator-dlya-sistem-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Интерполятор для систем программного управления</a>
Устройство для контроля логических блоков

Номер патента: 974375
Опубликовано: 15.11.1982
МПК: G06F 15/46
Метки: блоков, логических
...соответствующей последовательностью логических сигналов,В качестве запоминающего элемента может бьиь использована микросхема - одноразрядное 1024 - битовое полупрокводниковое запоминающее устройство в одном корпусе (например, типа К 134 РУ 9). Количество таких элементов в устройстве равно числу входов (а при программном контроле суммарному числу9743После заполнения всех канальных запоминающих элементов 5 генератор 2 импульсов выключается и подключается тактовый генератор 8. В то время, как. частота генератора импульсов выбирается 5 из условия обеспечения работы формирователя тестовых сигналов, частота тактового генератора выбирается из условия обеспечения контроля и ограничивается лишь временем, необходимым для считы й вания...
Устройство для психофизиологических исследований

Номер патента: 435554
Опубликовано: 05.07.1974
Авторы: Долгополое, Жураковский, Мануйлов, Поль, Самойлов
Метки: исследований, психофизиологических
...изображения 3 и одновременно выводится в блок анализа 10. Контроль за правильностью набора символов производится по показаниям индикаторов контрольного табло 12, а сличение введенных символов в формирователь изображения 3 с моделью задания производится по их изображениям на информационном табло 2.Задаваемые временные параметры Время предъявления и Время решения устанавливаются на пульте экспериментатора, При пуске устройства командный и кодовые сигналы установленного временного параметра поступают с пульта экспериментатора в блок задания времени 7, а по командному сигналу в нем начинается отсчет текущего времени и параллельно осуществляется коммутация цепей информационного табло 1 формирователем изображения 3,Текст задания...
Устройство для моделирования очереди
Номер патента: 521569
Опубликовано: 15.07.1976
Авторы: Елисеев, Овчинников, Цыган
МПК: G06N 1/00
Метки: моделирования, очереди
...очере,ди, возникающей в случае, когда количество 66 заявок, находящихся в очереди в данный момент превышает.ограничениена размер очереди, заданное условиями моделируемой за,дачи.В случае возникновения этого перелол-. М пения очереди, все заявки, поступившие на вход 8 после момента переполнениями очереди, получают отказ в обслуживании н будут направляться в поток заявок, получивших ,отказ в обслуживании. 1 К выходу,12 устройства может быть1 подключен прибор, регистрирукиций интерва, лы времени, затраченные устройством на;ожидание поступления заявок,В качестве реверсивного счетчика 1 мо, жет быть использован любой из известных; реверсивных многоразрядных счетчиков.Конкретная реализация устройства может ., быть вйпопнена, например,1...
Цифровое вычислительное устройство

Номер патента: 593211
Опубликовано: 15.02.1978
Авторы: Жабин, Корнейчук, Тарасенко, Щербина
МПК: G06F 7/38
Метки: вычислительное, цифровое
...- . В распределителе импульсов при этом единица находится в 1-ом 20 разряде слева, Блок управления 6 переключает коммутатор 4 таким образом, что цифры хьь х 2 г, хж 1 операндов Хь Х 2, , Хггриоавляют к содержимому сумматору 3, а цифры у 1,0 у 2,0 упоперандов У г Упоступают на управляющие входы счетчиков 1 и 2. Операнды У, (1=1,2, , и) должны быть нормализовапы, т. е. 11;,1= 1. При этом если цифра уьг равна единице, то к содеряимому счетчика 1 прибавляется единица с распределите- з 0 ля импульсов 5, а на сумматор 3 выдается инверсный код содержимого счетчика 2. После приема всех т+и цифр блок управления 6 выдает на сумматоре 3 прямой (если знак содержимого сумматора - минус), или инвер- З 5 сный (если знак содержимого сумматора - плюс)...
Счетно-импульсный преобразователь разности последовательных кодов в параллельный

Номер патента: 612241
Опубликовано: 25.06.1978
Авторы: Бессмельцев, Бурнашов, Вородьев
МПК: G06F 5/04
Метки: кодов, параллельный, последовательных, разности, счетно-импульсный
...которого соединен с выходом нцчитателя частот2, индуцнрующим совпадение выходныхимпульсов делителей 1 н 4, а второйс выходом 0 блока управления 3(импульс на выходе 0 блока управ"ления появляется, когда ао всех раЭ"рядах счетчика блока управления 3 иделителя частоты опорного сигнала 1устанавливается 0),)О Преобразователь также сбдержитэлемент 2 И-ИЛИ 8, ЦЬ -триггер 9,Тб -триггер 10, 35 -триггер 11,элемент И 12, генератор импульсов 13,счетчик коррекции 14, блок сумматоров15, первый, второй и третий дифференцирующие элементы - соответственно16,17, 18,Вход б триггера 10 подключен к выходу 1 блока управления 3, а выход триггера - к входу элемента И 12,выход которого соединен с входом триггера 11, Выход триггера 11 подключенк второму входу...
Предыдущий патент: Резервированная управляющая система
Следующий патент: Устройство для замера ходов приводного элемента микровыключателя
Случайный патент: Обувь ортопедическая