Устройство для моделирования нелинейных колебательных систем
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 651366
Авторы: Бансевичюс, Скучас
Текст
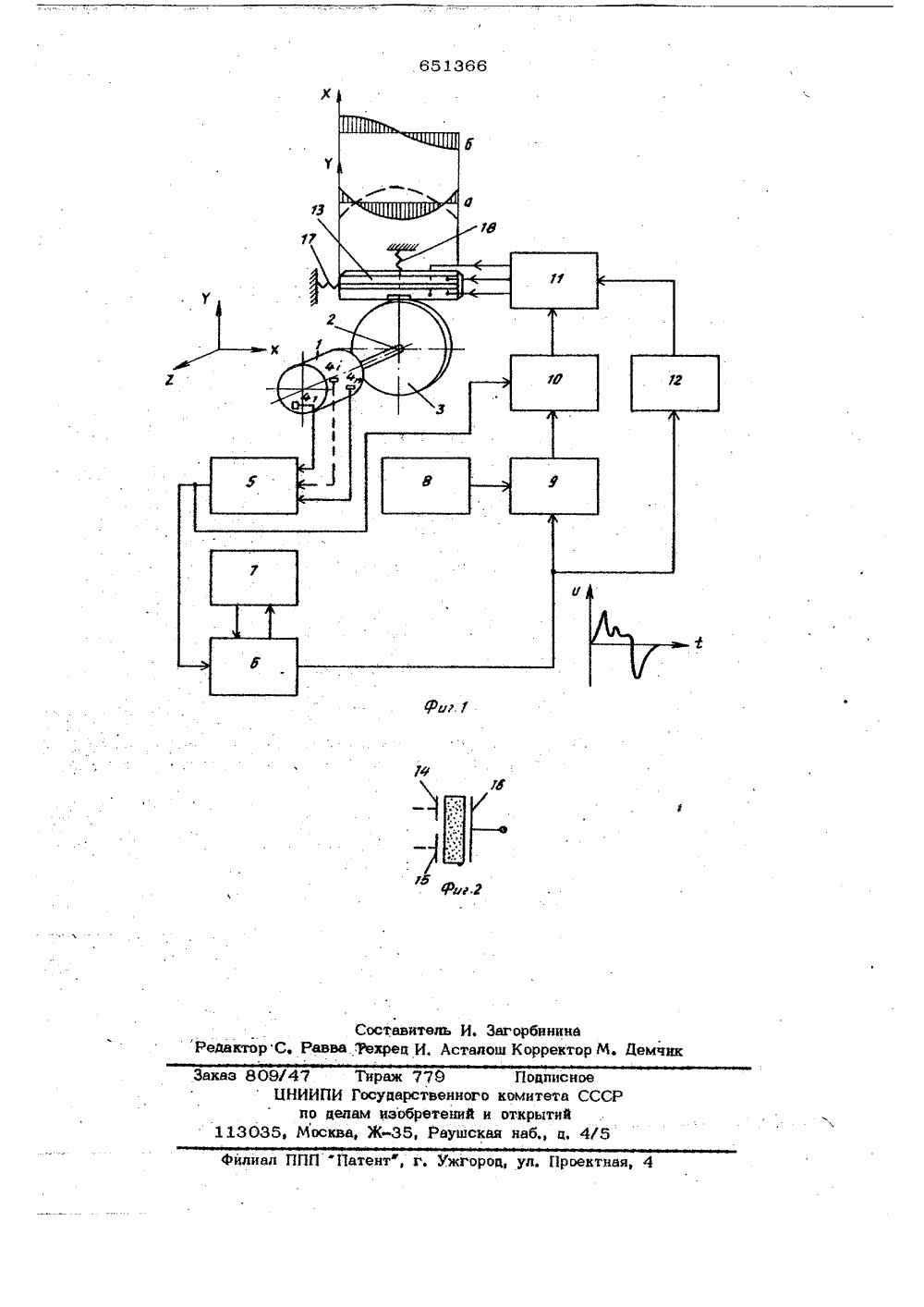
(ц 651366 Саоз Ссетских Сфциалистицеских Рвспублик(22) Заявл с присоед 6543/ 18-24 7/48 нием заявки М т (23) Приорите Гесудеретееныл е СССР ее делам зебрте и етротйбликовано 05.03.7 та опубликования описания 10.03,79. Скучас и Р. 10. Бансевичюс Каунасский политехнический институт им, Антанаса Снечкуса 1) Заявител 4) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЛИНЕЙНЫХ КОЛЕБАТЕЛЬНЫХ СИСТЕМ т совердинате или Изобретение относится к областианалого-цифровой вычислительной техни-ке и может быть применено для анализа и синтеза нелинейных связей при мо"делировании прецизионных динамическихобъектов с помощью вычислительныхмашин.Известно устройство для моделирования нелинейных колебательных систем,которое содержит исследуемый обьект,возбудитель колебаний, датчики параметров, установленные на исследуемомобъекте, блок моделирования динамической системы и схему обработки сигналов, полученных с датчиков парамет-.ров 11.Однако это устройство позволяетпровести моделирование только в случае, когда исследуемый объекшает колебания по одной коорв плоскости,Из известных устройств для моделирования нелинейных колебательных систем наиболее близким является устройство, содержащее динамическую модель,датчики параметров,"установленные надинамической модели, блок воспроизведения характеристик динамической сис,темы, первый ихой и выход которого подключены к входу и выходу соответственно блока оптимизации, генератор колебаний, вход которого соединен с первымвходом первого амплитудного модулятора, и пьезоэлектрическийпреобразова О тель,ц .К недостатку устройства следует оънести то, что в нем отсутствует воэможность провести моделирование системы с исследуемым обьектом ротационно-колебательного типа т. е, объекта,совершающего вращательное движениес крутильными колебаниями. Это сужаетобласть применения устройства,Целью настоящего изобретения являЛ ется расширение области применения,Указанная цель достигается тем, чтов устройство для моделирования нелинейных колебательных систем введены,Устройство работает следующим образом.Вал 2 совершает вращательное движение с крутильными колебаниями. Динамическая моцель 1 представляет часть динамической системы, которую трудно описать математически. Динамические связи модели 1 с валом 2, которые легко поддаются формализации, описываются дифференциальными уравнениями. Если колебания в-ой связи модели с валом 2 описываются дифференциальным уравнением:ДЯ Ф Ьф+ 1(Ц9 (1) где ф,ф, р - координаты угловых ускорений скорости и амплитуды колебаний соотвегственно в-ой связи;Э - момент инерцииэлементов связи;1,8 - коэффициенты жесткости и демпфирования соответственно;М - результирующий момент инерций,передаваемый на вал 4 - ой связью,то решение уравнения (1) происходитв блоке 6 по сигналам, поступающимв него через блок усилителей 5 с цатчиков 4444;,пропорциональным состояниям элементов 1 -ой связи, т. е.ф,ф,р . Решение в блоке 6уравнения ( 1) происходит по общеизвестным принципам. При этом на выходеблока 6 появляется аналоговый сигнал,равный результирующему моменту, действующему 1-ой связи на вал 2. Посигналу блока 6 с пьезоэлектрического преобразователя 13 этот моментточно передается на вал 2. Точнаяпередача момента на вал 2 по сигналус блока 6 осуществляется следующимобразом,Сигнал с блока 6 моцулируется амплитудным модулятором 9 высокой частотой генератора колебаний 8 и поступает в сумматор 10. В зависимости от скорости вращения зала 2 модели(информация"об угловой скорости вращения поступает от выхоца блока усилителей 5 на второй вхоц сумматора) устанавливается абсолютная величина модулированного напряжения с выхода блока 6, которое цальше поступает через блок реверса 11 на электроды 14 и 16 преобразователя 13, В преобраэовя теле 13 возбуждаются продольные 3 , 651366сумматор, ключ, блок усилителей, блокреверса, а пьезокерамический преобразователь выполнен с двумя степенямисвободы в виде пьеэокерамическогостержня, на котором ра.лещены электроды, 3соединенные с выходами блока реверса,первый вход которого через ключ подключен ко второму выходу блока воспроизведения характеристик динамическойсистемы, соединенному с первым входом 1 фамплитудного моцулятора, выхоц которого подключен к первому входу сумматора, вьаод которого соединен со вторымвходом блока реверса, второй вхоц которого подключен к выходу блока усилителей, соединенному со вторым входомблока воспроизведения характеристикдинымической системы, входы блокаусилителей подключены к датчикам параметров, динамическая модель установлена на валу, на котором укреплен дополнительно введенный циск, сопряженныйс пьеэокерамическим стержнем.Изобретение поясняется чертежами,Яа фиг. 1 представлена блок-схема уст- ф25ройства; на фиг, 2 -,схема расположенияэлектродов пьезоэлектрического преобраэователя.Устройство состоит иэ динамическоймодели 1 с валом 2, на котором жест 30,"ко закреплен диск 3, датчиков параметров объекта 4 14, выходы которыхчерез блок усилителей 5 подключенык входам блока воспроизведения характе 33ристик динамической системы С, взаимносвязанного с блоком оптимизации 7,генератора колебаний 8, амплитуцногомодулятора 9, к первому входу которогбподйиочен вйхоц генератора колебаний 8, а ко.второму входу выход блока,Сумматора 10, через который выходамплитудного модулятора 9 соединенс первым входом блока реверса 11, ак другому входу сумматора 1 0 под 45ключен выход блока усилителей 5,ключа 1 2, через который выход блока 6соединен с вторым входом блока реверса1 1, пьезоэлектрического преобразователя13, вййолненного в виде пьезокерамичес 50Мого стержня, с разделенными электродами1415 (фиг, 2) по длине с одной стороны и неразделенным электродом 16с другой. Электроды 14, 15 и 1.6 присоедйнены к соответствующим выходамблока реверса 11, Частота генератораколебаний 8 равна резонансной частотеизгибных и продольных колебаний стерж.ня преобразователя 13. При помощи пруи изгибные колебания, Но существует определенная разность фаэ их колебаний (около 90 ), котораи обеспечивается неодинаковостью частот резонансных продольных и изгибных коле баний стержня преобразователя 13, В результате в зоне контакта стержня с диском 2:происходят высокочастотные косые соударения, приводящие к появлению тангенциальных импульсов, при О водящих к созданию окружной силы на диске 2, Этот момент соответствует форме сигнала с выхода блока 6, так, как величина момента в определенной зоне линейно зависит от амплитуды ко лебаний и тем самым, от напряжения. При перемене знака сигнала с выхода блока 6 на обратный блок реверса 1 1 присоединит напряжение к электродам 15 и 16, произойдет перемена анака 20 остающегося момента пропорциональ- но сигналу с выхода бпока 6 (при реверсировании меняется фаза изгибных колебаний относительно продольныхона 180 ).Так как частота сигнала на выходе генератора 8 сотни кГц, то в больших пределах угловой скорости вращения вала 2 момент, передаваемый пьезоэлектрическим преобразователем на вал 2, не зависит от этой скорости и осуществляется большая точность передаваемого момента по сигналу с выхода блока 6.Изменение параметров , ,Ь в блоке35 6 по уравнению (1) можно провести оптимизацию модепируемой части системы вручную или с помощью блоха оп 1 имиэации 7 автоматически.40Наличие безынерционного пьезоэлектрического преобразователя, точно передающего крутящий момент валу объекта по сигналу иэ блока моделирования, позволяет и введение дополнительных45 блоков и связей в устройстве в широком частотном диапазоне провоцить моделирование прецизионных ротационно-колебательных систем. Формула изобретенияУстройство для Моделирования нелинейных колебательных систем, содержащее динамическую модель, датчики параметров, установпенные на модели, блок вос произведения характеристик динамической системы, первый вход и выход которого подключены к выходу и входу соответственно блока оптимизации, генератор колебаний, выход которого соединен с первым входом первого амплитудного модулятора, и пьезоэлектрический преобразователь, о т л и ч а юш е е с я тем, что, с целью, расшире ния функциональных возможностей в него введены сумматор, ключ, блок усилителей, блок реверса, а пьезокерамичео= кий преобразователь выполнен с двумя степенями в виде пьеэокерамического стержня, на котором размещены электроды, соединенные с выходами блока реверса, первый вход которого через ключ подключен ко второму выходу блока воспроизведения характеристик динамической системы, соединенному с первым входом амплитудного модулятора, выход которого подключен к первому входу сумматора, выход которого соединен со вторым входом бпокв реверса, второй вход которого подключен к выходу блока усипителей, соединенному со вторым входом блока воспроизведения характеристик динамической системы, входы блока усилителей поцключепы к датчикам параметров, динамическая модель установлена на валу, на котором укреплен дополнительно введенный диск, сопряженный с пьеэокерамическим стержнемИсточники информации, принятые во внимание при экспертизе1, Авторское свидетельство СССР Я 516057, кл, ( 06 С 7/48, 1975. 2. Авторское свидетельство СССР,651366 каз 809/47 Тираж 779 ПодписноеЦНИИПИ Государственного комитета СССРпо делам иэобретений и открытий113035, Москва, Ж, Раушская наб., д, 4/5 Патент", г. Ужгород, ул. Проектная, 4 илиал П Составитель И. ЗагорбининаРедактор С. Равна.Рехред И, Асталош Корректор М. Демч
СмотретьЗаявка
2466543, 28.03.1977
КАУНАССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. АНТАНАСА СНЕЧКУСА
СКУЧАС ИГНАС ЮОЗО, БАНСЕВИЧЮС РАМУТАС ЮОЗО
МПК / Метки
МПК: G06G 7/48
Метки: колебательных, моделирования, нелинейных, систем
Опубликовано: 05.03.1979
Код ссылки
<a href="https://patents.su/4-651366-ustrojjstvo-dlya-modelirovaniya-nelinejjnykh-kolebatelnykh-sistem.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для моделирования нелинейных колебательных систем</a>
Способ изменения времени срабатывания системы ару усилителей

Номер патента: 149234
Опубликовано: 01.01.1962
Авторы: Береза, Слуцковский, Шумилина
Метки: ару, времени, изменения, системы, срабатывания, усилителей
...участка характеристики лампы дополнительного каскада усилителя АРУ используется начало нелинейной части характеристики - точка а, В этом случае при регистрации отражений на аноде дополнительного каскада усиления АРУ амплитуда будет меньше, чем в предыдущем случае (изображено пунктиром фиг, 2), точно так же меньше будет амплитуда колебаний, соответствующих отражениям, и после выпрямителя (изображено пунктиром фиг, 3), Конденсаторы фильтра АРУ в этом случае будут заряжаться под действием меньшего напряжения, вследствие чего их заряд будет происходить медленнее (показано пунктиром на фиг 4), Медленное увеличение регулирующего напряжения приведет после начала отражения к более медленному уменьшению амплитуды на выходе усилителя; форма...
Система регулирования турбины
Номер патента: 918452
Опубликовано: 07.04.1982
Авторы: Глазов, Григорьев, Пинский
МПК: F01D 17/24
Метки: турбины
...который переключает питание От на резервный канал по сигналу на выходе порогового элемента 13 ос52 8свидетельствующий о неисправности основного канала управления. Этот сигнал используется как для индикации отказа, так и для ввода резервного канала. С этой целью выходной сигнал порогового элемента 13 подается на переключатель 16, который переключает питание с основного канала иа резервный, При этом выходной сигнал резервного канала 17 через электро- гидравлический блок 3 воздействует на сервомотор маневрового золотника, обеспечивая обработку рассогласования.Аналогичным образом происходит выявление неисправности канала 2 и при возникновении отказов в других его звеньях, например в усилителе 10. Действительно, при отказе этого усилителя и...
Проллежуточный усилитель видеосигнала

Номер патента: 427489
Опубликовано: 05.05.1974
Авторы: Бордуков, Брацлавец, Ресин, Хромов
Метки: видеосигнала, проллежуточный, усилитель
...участкам строки.Участки выбирают с помощью управляющих импульсов, поступающих на входы управления схем с блока формирования управляющих импульсов 10. Управляющие импульсы формируют из импульсов частоты строк, поступающих на вход умножителя частоты импульсов 11, формирующего импульсы в виде меан. дров. Из положительных полупериодов меандра в формирователях прямоугольных импульсов 8 и 9 формируются импульсы, управляющие работой схем фиксации по четным и нечечцым участкам строки.Чтобы устранить прохождение в видеосигнал через схемы запрета 4 и 5 импульсов фиксации и реакции схему фиксации, импульсы фиксации сдвигают относительно переднего фронта положительного полупериода меандра и делают меньшей длительности, чем положительный полупериод...
Система телемеханики для управления передвижкой секций шахтной гидрокрепи

Номер патента: 1269171
Опубликовано: 07.11.1986
Авторы: Балакерский, Коломийцев, Лещинский
МПК: G08C 19/16
Метки: гидрокрепи, передвижкой, секций, телемеханики, шахтной
...всю систему, исключение составляет только регистр 8, Окончен первый цикл контроля системы телемеханики.Число повторяющихся циклов контроля задается при помощи счетчика 23 циклов, отсчитывающих их от блока 7 сравнения. В случае обрыва тракта телемеханики генератор 26 подключается к последней годной ячейке распределителя 19, номер которой задается дешифратором 12,причем схема устрой" ства при этом сохраняет все перечисленные свойства, а также полную достоверность информации, получаемой с блока 4 индикации номера секции. Это стало возможным благодаря подключению через мультиплексор 10 блока 4 индикации номера секции к регистру 8, вследствие чего оператор может осуществлять дополнительный визуальный контроль за состоянием регистра 8, в...
Устройство для моделирования системы охлаждения двигателя внутреннего сгорания

Номер патента: 1287202
Опубликовано: 30.01.1987
МПК: G06G 7/64
Метки: внутреннего, двигателя, моделирования, охлаждения, сгорания, системы
...изменяя дискретнона управляющих входах ограничителей13 и 28 величину напряжений, на выходах интеграторов 14, 29 можно получать различные напряжения, пропорциональные температуре окружающейСреды,задана переключателем 30.Напряжение Бт, с выхода интегратора 14 поступает на вхо" сумматора19. На его другой вход поступает напряжение Пт, , пропорциональное температуре охлаждающей жидкости в радиаторе (в данный момент оно соответствует температуре окружающей среды),В результате на выходе сумматора 19появляется напряжение П, пропорциональное количеству тепла, отводимогоот двигателя,Это напряжение через резистор 21 (коммутатор 22 при незапущенном двигателе отключен) и усилитель 25 поступает на вход интегратора 29, заряжая его, При этом на выходе...
Предыдущий патент: Модель частотно-импульсного модулятора
Следующий патент: Устройство для моделирования детектора
Случайный патент: Горелка для дуговой сварки магнитоуправляемой дугой