417356
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 417356




Текст
кг.с0 П И С А Н И Е 47356 Союз Советских Социалистических РеспубликЗависимое от авт. свидетельстваЗаявлено 04.Х.1971 ( 1701421/27-11)с присоединением заявки-Приоритет М. Кл, В 65 Я 63/02 Государственный комитет Совета Министров СССР оо делам изобретений н открытий1 УДК 621,86.154(088,8) 1 ублцавацо 28.11.1974. Б;оллетень М 8 2.Л 1.1974 Дата спублпкованця описания Авторыизобретения А. Б. Нейланд, В. П. Вуренков, 1 О, д. Агсев-марковск 1,и и Г, И, Фигуроваявитель ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО ванной на нем обеспечивающей го органа к заой жестко смоная - в корпусе смоцтиромуфтой,от тяговофта котора друг захватом валом спредохранительнойпередачу движенихвату, одна полумтирована на валкаретки.На фиг.ство, община фиг. 1 1 изображено опи й вцд; на фиг. 2на фиг, 3 - р ываемое устрои - разрез по А-А азрез по Б-Б на Изобретение касается механизации и автоматизации внутризаводского транспорта.Известны транспортирующие устройства,содержащие гибкий тяговый орган с приводоми натяжным механизмом, каретку, установленную на подвесном пути и связанную с тяговым органом, а также захват, смонтированный в направляющих каретки с возможностьюперемещения под действием самостоятельного привода. Однако их невозможно использовать для транспортирования изделий в автоматических линиях, так как тяговый органцепь разорвана и жестко связана одним концом с кареткой, а другим - с захватом, чтоисключает возможность закрепления на ней 15нескольких кареток, необходимых для одновременного транспортирования несколькихизделий к рабочим позициям. Конструкция известных устройств сложна из-за наличия двухприводов; перемещения каретки и перемещеция захвата,Целью изобретения является использованиепривода тягового органа для перемещения захвата и расширение технологических возможностей устройства. 25Для этого предлагаемое устройство снабжено, по крайней мере, одной дополнительнойкареткой, связанной с тяговым органом, причем каждая каретка снабжена установленнымв ее корпусе и кинематически связанныМ с ЗО фиг. 1.Транспортирующее устройство содержит привод с установленной на выходном валу приводной звездочкой 1, натяжной механизм с наз яжцой звездочкой 2, бесконечную цепь 3, объединяющую каретки 4 - 7, и транспортный подвесной путь 8. Бесконечная цепь связывает все каретки через звездочку 9 шариковой муф 1 ы и отклоцгцощце звездочки 10, Каждая каретка цотеелг левое и правое крайние положения. Б крайних положениях кареток на пути 8 установлены упоры крайних положений г фиксаторы, фиксирующие каретки в крайних положениях, и бескоцтактные датчики, фиксирующие крайние положения каждой каретки. Е 1 а каретках расположены бесконтактцые датчики, фиксирующие верхнее и нижнее положения захватов.Каждая каретка имеет корпус 11, внутри которого па подшипниках качения собраны валы 12 и 13, 1-1 ерез зубчатые шестерни 14 -10 55 60 65 316 вал 12 связан с рейками 17. На одной стороне реек укреплены захваты 18, а на другой - упоры 19, огран ход реек вниз. Гайки 20 служат для регулировки величины хода рейки вниз. На конце вала 12 посажена предохранительная шариковая муфта, состоящая из свободно сидящей на валу 12 звездочки 9, жестко закрепленной на валу 12 ступицы 21, кольца 22 и пружины 23. Последняя отрегулирована так, что передаваемый шариковой муфтой крутящий момент больше момента от сил сопротивления горизонтальному перемещению груженой каретки и больше момента, создаваемого подвешенным на захватах грузом.Внутри корпуса 11 смонтировала управляемая электромагнитная муфта 24, одна полу- муфта которой жестко связала с корпусом 11, а другая - с валом 12. К корпусу прикреплен кронштейн 25 с катками 26 и 27, на которых каретки 4 - 7 перемещаются по пути 8, На корпусе 11 свободно закреплены отклолающие звездочки 10.Устройство работает следующим образом, Если каретки находятся в крайнем правом положении, то нажаты соответствующие датчики крайних полол(ений и каждая каретка зафиксирована соответствуОщгм фиксатором оси горизонтального перемещения. Захваты находятся вверху (замкнуты соответствующие датчики), электромагнитные муфты отключены, а привод конвейера выключен, По окончании обработки на всех станках, входя - щих в линию, постугает команда па включение привода конвейера. Цепь 3 начинает двигаться, а каретки остаотся неподвижными, так как они зафиксированы от горизонтального перемещения.Движущаяся цепь через шариковую муфту Вращает Вял 12, тяе еяе злОе ромягпитпа) муфта выключена и вал 12 может проворачиваться. Вращение вала 12 через зубчатые шестерни 14 - 16 приводит в движение рейки 17 с укрепленным на гих захватом 18. Захваты движутся вниз и в нижнем положении каждого захвата Яжиъгаетс соответствующий датчик нижнего положения, Когда все датчики замкнуты, привод конвейера отклОчаеся и детали при этом зажаты захватами.Перед подъемом дегалей происходит их освобождение от зажимных органов станков (освобождение от центров, тисков и т. д.), Как только поступает команда, что детали па всех станках освободились от зажимпых органов станков, происходит реверсивное включение привода конвейера. Цепь 3 начинает двигаться в другуо сторону, захваты с деталями поднимаотся вверх и в верхнем положении каждого захвата лажимается соответствующий датчик, Когда все датчики верхнего положения захвата замкнуты, дается команда на включение электромагнитных муфт 24 и вывод фиксаторов из кареток. Каретки Освобождаются для горизонтального перемещения влево. Когда электромагнитные:.уфты 15 20 25 30 35 40 45 50 включены, вал 12 впащаться не может (он через муфту соедгшеп с корпусом 11), ступица 21 вращаться ле может (ола жестксвязана с валом 12), следовя.ельпо, звездочка 9 тоже пе вращается, так еак момент, передаваемый шариковой муфтой, больше момен га от сопротивления горизонтальному псремецению каретки. Цепь 3 за зубья звездочек 9 и 10 начинает перемещать каретки 4 - 7 в их крайние левые положения, т. е. каретка 7 занимает положение каретки бкарека б- - каретки 5 и т. д. Следовательно, деталь из питателя 28 линия встает пад станком 29, со санка 29 - пяд станком 30, со станка 30 - па станок 31, а со с.яика 3 - над разгрузоч.ы., устройством 32,Так как величина горизонтального перемещения кареток различная, то происходит следуОпее.Как золько одна из кяретое дзстигает свое- ГО левого пол(Б(епи,(, Оя наезжает пя упор и замыкае; копсчпие левого положения. Момент сопротивления горизонтальному перемещению этой каретки увеличивается и стаповится оольше момента предохранительной шариковой муфты, поэтому звездочка 9 начинает свободно проворачиваться на валу 12 до тех пор, пока последняя каретка не достигает своего левого положения.Когда все каретки досигяОт своих левых положений, дается команда на ввод фиксаторов в корпуса карсток и Отключение электромагнитных (у(1 гг, Зятем следует реверс привода еопвейсра и опускание захватов вниз. Каретки 7, 6 и 5 загружают деталями соответственно сзпеи 29, 30 и 31, я каретка 4 разгружает готовую детал; в разгрузочное устройство. После этого следует зажим деталей на станках, подъем пустых захватов вверх, включение станков в работу, включение электромагнитных муфт, вывод фиксаторов из кареток, пере.ещепие кареток в крайнее правое положение, ввод фиксаторов, отключение привода конвейера и отклочения элекромагнитных муфт, т, е, все устройства возвращаются в исходное положение.Упоры и фиксаторы крайних положений кареток могут устанавливаться в л обом месте транспортного пути 8. Предмет изобретенияТранспортирующее устройство, содержащее гибкий тяговый орган с приводом и натяжным механизмом, каретку, установленную на подвесом пути и связанную с тяговым органом, а также захват, смонтированный в направляющих каретки с возможлостью перемещения, отличающееся тем, что, с целью использовашя привода т;гового органа для перемещения захвата и расширения технологических возъОяностей, опо снабжено, по крайней мере, одной дополнительной кареткой, связанпои с тяговым органом, причем каждая каретка слабжен установленным в ее корпусеи кинематически связанным с захватом валом со смонтированной на нем предохранительной муфтой, обеспечивающей передачу движения от тягового органа к захвату, однаполумуфта которой жестко смонтирована навалу, а другая - в корпусе каретки.Заказ 1757713 Изд.1313 Тираж 760 Подписное Ц 1-1 ИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий Москва, К, Раушская наб., д. 4/5 Типография, пр, Сапунова, 2
СмотретьЗаявка
1701421, 04.10.1971
МПК / Метки
МПК: B65G 63/02
Метки: 417356
Опубликовано: 28.02.1974
Код ссылки
<a href="https://patents.su/4-417356-417356.html" target="_blank" rel="follow" title="База патентов СССР">417356</a>
Устройство для перемещения кареток со стеклом

Номер патента: 266170
Опубликовано: 01.01.1970
Авторы: Богомолов, Борений, Бородай, Зев, Коровин, Маслов, Шутов
МПК: C03B 15/18, F16H 7/06
Метки: кареток, перемещения, стеклом
...связью, приводные и натяжные звездочки, огибаемые бесконечно замкнутыми тяговыми цепями с толкателями на звеньях, рельсовые направля ющие и каретку с подвесами, отличающеесятем, что, с целью обеспечения одностороннего перемещения каретки и уменьшения габаритов устройства, тяговые цепи расположены в параллельных плоскостях по контуру треу гольника с перекрытием по основанию соседних углов, на звездочках которых установлены сопряженные ведущая и ведомая шестерни,2. Устройство по п. 1, отличающееся тем,что. с целью фиксации каретки в промежуточ.40 ных положениях, на тяговых цепях установлены упоры, взаимодействующие с толкателями параллельной тяговой цепи, с расстоянием между ними, соответствующим габаритному размеру по длине...
Привод захвата манипулятора

Номер патента: 521128
Опубликовано: 15.07.1976
Автор: Клименченко
МПК: B25J 3/00
Метки: захвата, манипулятора, привод
...снабжены вилками. 16, входящими в репление с осью 8 шарнира. В щцилиндрах 13 выполнены продольные пазы,служащие для прохода жидкости, герметизация которой обеспечена сильфоном 17.Для разгрузки сильфона от скручивающегомомента в одном из пазов цилиндра уста- Иновлена шпонка 18. Стержень 3 подпружинен возвратной пружиной 1 9. В корпусезахвата установлена с возможностью осевого перемещения зубчатая рейка 20, снабжейная пружиной 21 и сцепленнаФс секто- ЗОрами 22, которые с помощью рычагов связаны с губками захвата. На валу 5 заирецлено зубчатое коническое колесо 23, которое через промежуточные колеса 24 и 25связано с колесами 26 и 27, сиДящими на 35валах 4 и 28.Привод захвата манипулятора работаетследующим образом,Движение от...
Привод захвата манипулятора

Номер патента: 547335
Опубликовано: 25.02.1977
Авторы: Андреенко, Ворошилов, Михальченко, Парц
МПК: B25J 3/00
Метки: захвата, манипулятора, привод
...вдоль оси 5. На концах стержней 3 и 4, обращенных : к оси 5, виполнены плоские рейки, взаимодейсты .1 нп 1 е через промежуточные зубчатыеколеса 8 и 9 с рейками 6 и 7, Для воспри-ф ятия распорных усилий, возникающих в зубчатых зацепл:.:ив х реек стержней 3 и 4 срейками 6 и 7 вт,лок, предусмотрены поддерживающие опорные ролики 10 и 11.Зубчатые колеса 8 и 9 и опорные ролики И10 и 11 жестко закреплены соответственно на корпусах локтевого и кистевого звеньев с помошьк кронштейнов 12 и 13. Для то го, чтобы рейки 6 и 7 при изгибе шарниране выходили из з цжцения с зубчатыми ко- Жлесами 8 и 9 их у 1 лвое положение относи-ельно оси 5 фиксируется упорами 14 и 15. Привод захвата манипулятора работаетследующим образом,При перемещении стержня 3 в...
Привод захвата манипулятора

Номер патента: 688328
Опубликовано: 30.09.1979
Авторы: Данилов, Капинос, Семенов
МПК: B25J 3/00
Метки: захвата, манипулятора, привод
...заделаны в элсмситы 13 и 14, в которых расположены полости для рабочего тела. На оси 7 располагаются торовые силь фоны 15 и 16, с одной стороны которых задслаиы шайбы 17, и с другой - элемент 14. Сильфоны 15 и 16 взаимодействуют другс другом через упорный подшипник 18. "5 (:тержень 2 подпружинсн пружиной 19. Нак 011 цс стержня иарсзаиа зуо 1 атая рейка 20, сцепленная с секторами 21, которые с помощью рычагов связаны с губками захвата. На валу 4 нарезано зубчатос коипчс 1 о скос колесо 22, которое чсрсз промсжуточ688328 Формула изоб ени а, содержа по оси конв звеньев спсрсмещее узлы, отю расшире- О остей, шартами, ображдый цз копн из этихстержшо, г 45 нира, чающийся тановленныен упорный Составитель В. Ушако ехред Н. Строганова едактор...
Привод захвата
Номер патента: 1569224
Опубликовано: 07.06.1990
Авторы: Гамаюн, Голованов, Никитин
МПК: B25J 11/00
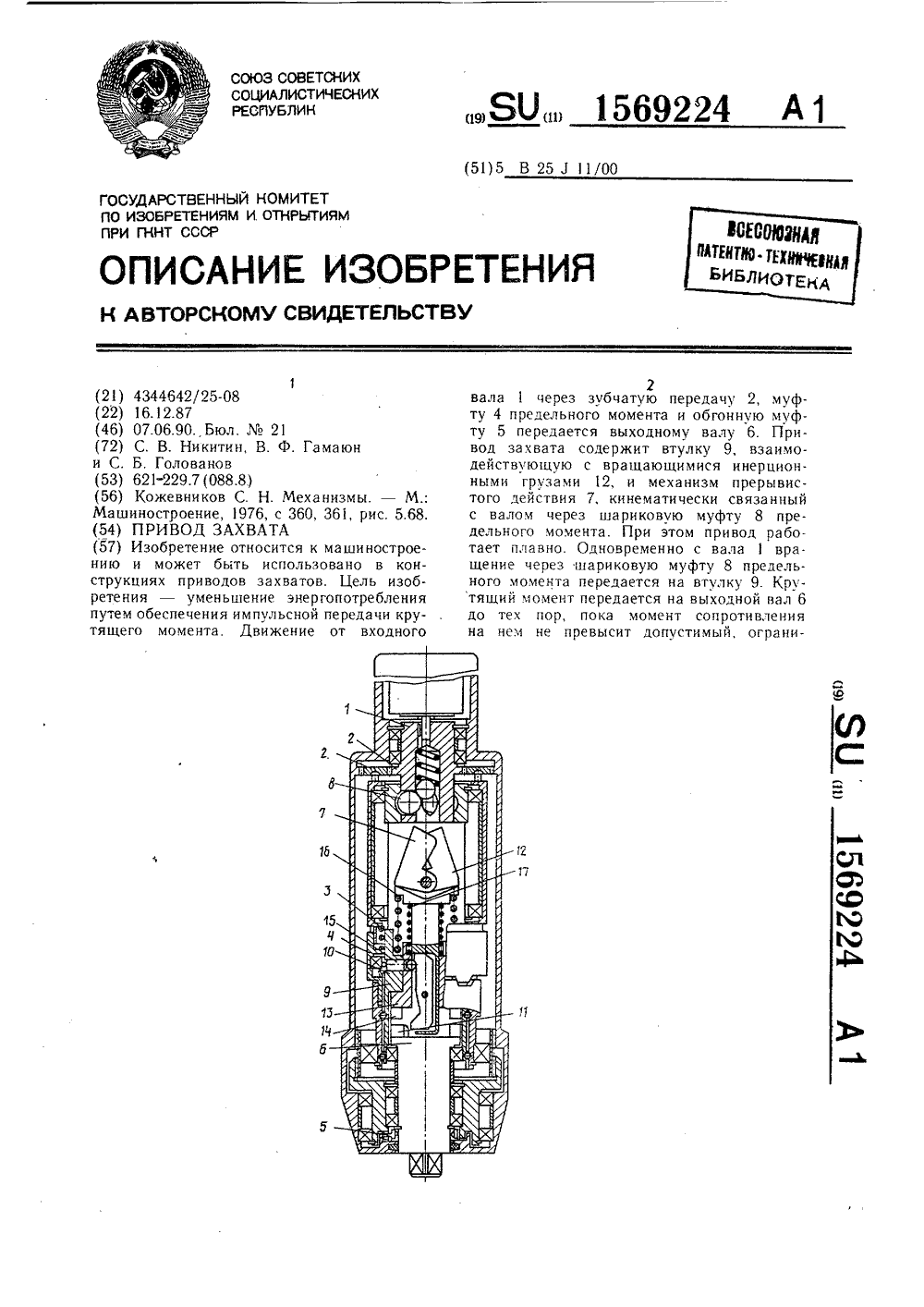
...крутящего мо- ника 14 и наковальник 11. Привод срабамента и обгонную муфту 5 с выходным тывает импульсно.валом 6. Привод снабжен механизмом 7 После этого пружина 16 возвращаетпрерывистого действия, кинематически свя- вал3 в первоначальное положение, что поззанным с входным валомчерез допол- воляет вернуться в первоначальное положенительную муфту 8 предельного крутящего 2 Б ние последовательно стопору 15 и муфте 4момента. Механизм 7 прерывистого действия предельного момента. Далее при необхопериодически взаимодействует с втулкой 9, димости цикл повторяется,установленной в корпусе 10. Механизм 7 со- Таким образом, механизм 7 прерывисдержит наковальню 11, установленную на того действия повышает эффективность равыходном валу 6. Втулка 9...
Предыдущий патент: 417355
Следующий патент: 417357
Случайный патент: Система управления упругими перемещениями круглошлифовального станка