Стенд для испытания промышленных роботов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1764985
Авторы: Гурский, Романюк, Цырендоржиев

Текст
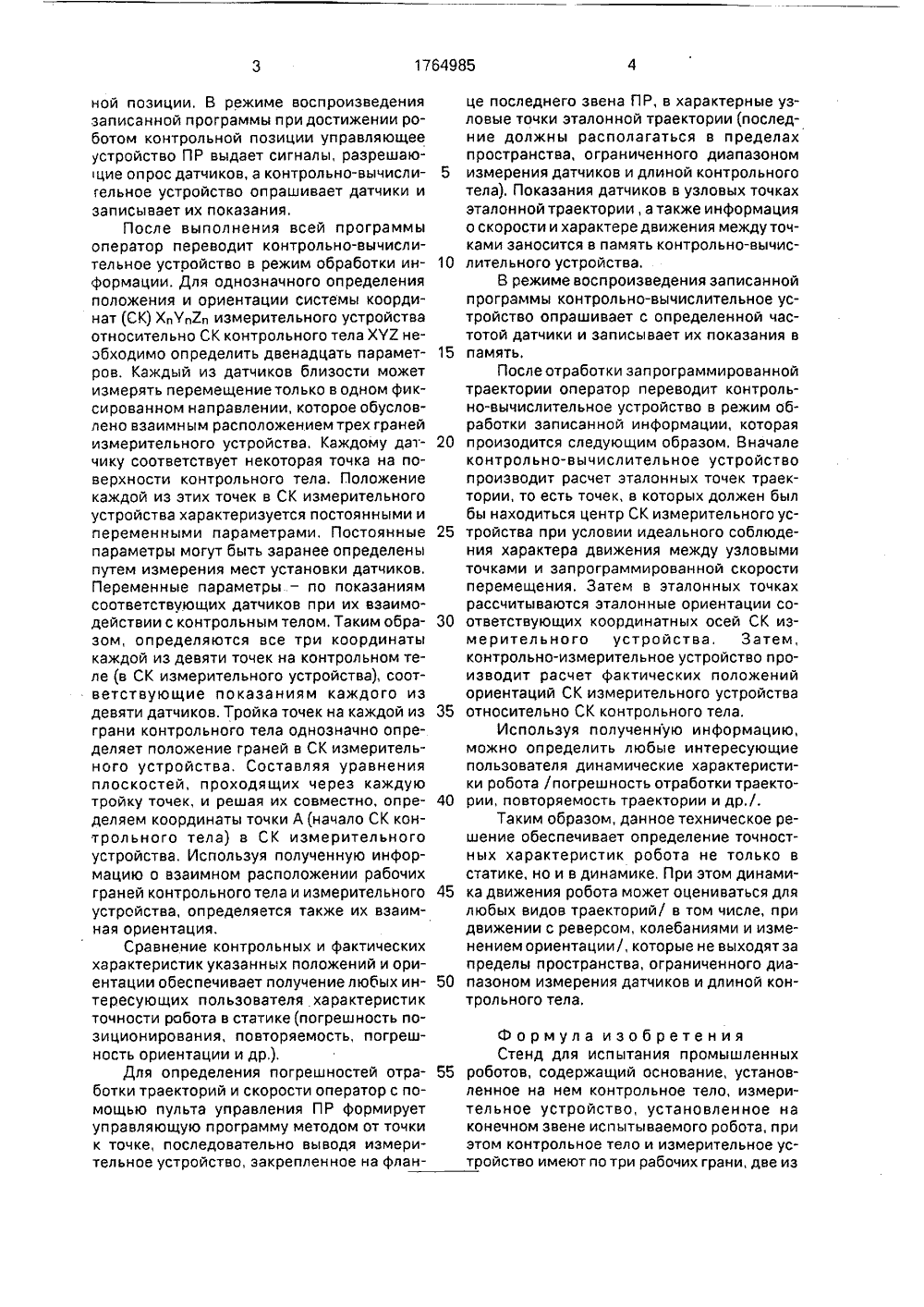
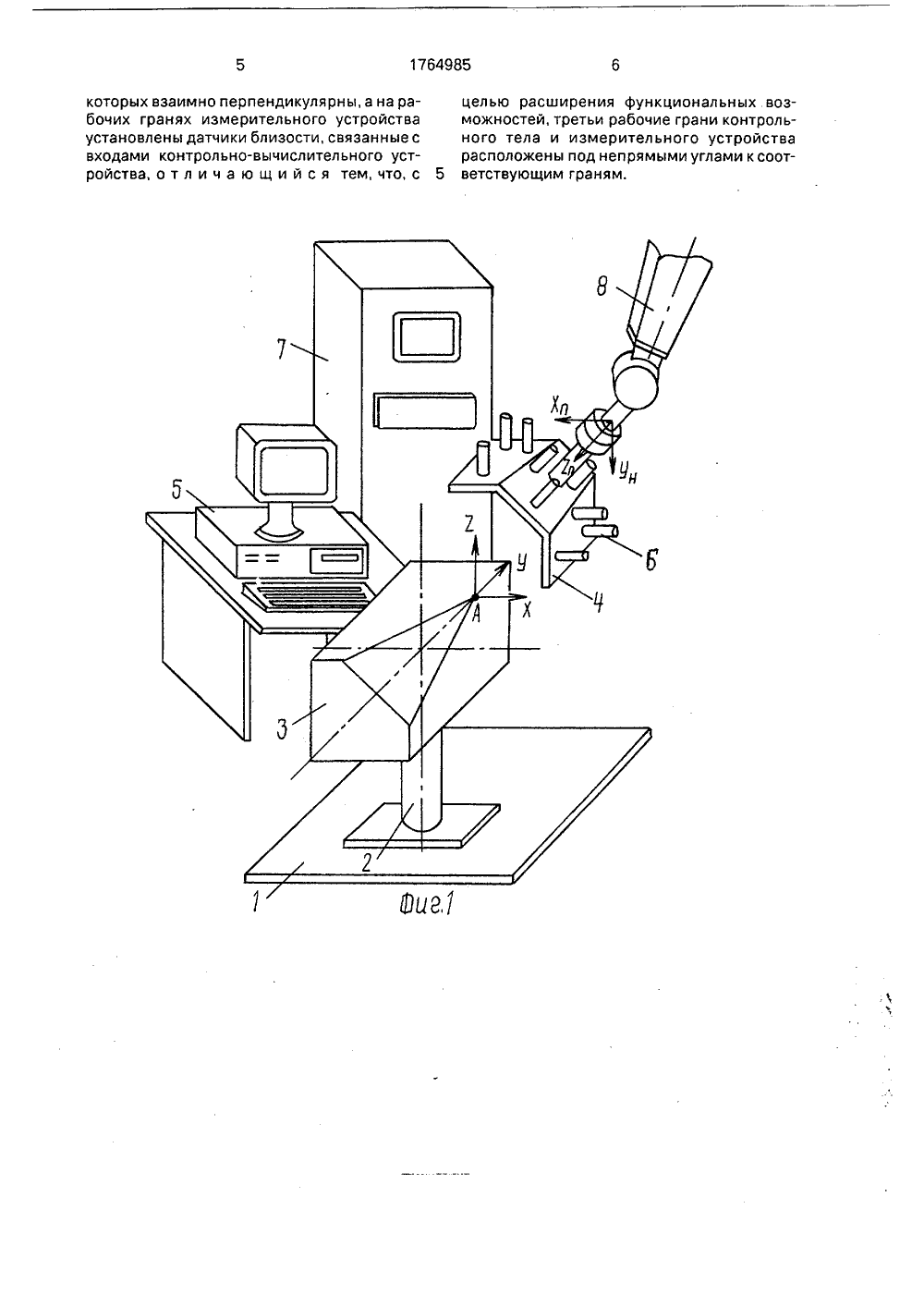
(51)5 В 25 .3 11/00 ОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТКРЫТИЯМ РИ ГКНТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИ(54) СТЕНД ДЛЯ ИСПЫ ШЛЕННЫХ РОБОТОВ(57) Использование: для определения точностных характеристик промышленных робоИзобретение относится к области машиностроения и предназначено для определения точностных характеристик промышленных роботов /ПР/.Целью изобретения является расширение функциональнь)х возможностей стенда за счет определения характеристик робота не только в статике, но и в динамике.На фиг. 1 представлена схема контрольного тела и измерительного устройства; на фиг, 2 - функциональная схема стенда для испытания ПР.Стенд для испытания ПР содержит основание 1, стойку 2, контрольное тело 3 измерительное устройство 4, контрольно- вычислительное устройство 5,датчики близости 6, устройство управления 7, испытуемый робот 8. Контрольное тело 3 закрепляется на стойке 2, которая обеспечивает возможность регулировки по высоте, а также по углу вокруг вертикальной и горитов, Сущность изобретения; стенд содержит основание, установленное на нем контрольное тело, и измерительное устройство, установленное на конечном звене промышленного робота, при этом контрольное тело и измерительное устройство имеют по три рабочих грани, две из которых взаимно перпендикулярны, а на рабочих гранях измерительного устройства установлены датчики близости. Последние связаны с контрольно-вычислительным устройством, причем третьи рабочие грани контрольного тела и измерительного устройства расположены под непрямыми углами к соответствующим граням, 2 ил. зонтальной осей. Стойка 2 с закрепленным на ней контрольным телом 3 устанавливается на основании 1 в одном из мест крепления, Измерительное устройство 4 представляет собой трехгранник, на каждой грани которого установлено по одной группе датчиков близости 6, Выходы датчиков 6 подключены к первым входам контрольно- вычислительного устройства 5, вторые входы которого соединен ы с выходом устройства управления 7 испытуемого робота 8, Выходы контрольно-вычислительного устройства связаны с входами датчиков 6,Стенд работает следующим образом, Для определения точностных характеристик работа в статике оператор с помощью пульта управления ПР формирует управляющую программу вывода измерительного устройства 4, закоепленного на выходном звене ПР, в заданную позицию в определенном направлении относительно контроль55 ной позиции, В режиме воспроизведения записанной программы при достижении роботом контрольной позиции управляющее устройство ПР выдает сигналы, разрешаюцие опрос датчиков, а контрольно-вычислигельное устройство опрашивает датчики и записывает их показания,После выполнения всей программы оператор переводит контрольно-вычислительное устоойство в режим обработки информации. Для однозначного определения положения и ориентации системы координат (СК) ХУЪ измерительного устройства относительно СК контрольного тела ХУ 2 необходимо определить двенадцать параметров. Каждый из датчиков близости может измерять перемещение только в одном фиксированном направлении, которое обусловлено взаимным расположением трех граней измерительного устройства, Каждому датчику соответствует некоторая точка на поверхности контрольного тела, Положение каждой из этих точек в СК измерительного устройства характеризуется постоянными и переменными параметрами, Постоянные параметры могут быть заранее определены путем измерения мест установки датчиков, Переменные параметры - по показаниям соответствующих датчиков при их взаимодействии с контрольным телом. Таким образом, определяются все три координаты каждой из девяти точек на контрольном теле (в СК измерительного устройства), соответствующие показаниям каждого из девяти датчиков. Тройка точек на каждой иэ грани контрольного тела однозначно определяет положение граней в СК измерительного устройства. Составляя уравнения плоскостей, проходящих через каждую тройку точек, и решая их совместно, определяем координаты точки А (начало СК контрольного тела) в СК измерительного устройства, Используя полученную информацию о взаимном расположении рабочих граней контрольного тела и измерительного устройства, определяется также их взаимная ориентация.Сравнение контрольных и фактических характеристик указанных положений и ориентации обеспечивает получение любых интересующих пользователя характеристик точности работа в статике (погрешность позиционирования, повторяемость, погрешность ориентации и др,).Для определения погрешностей отработки траекторий и скорости оператор с помощью пульта управления ПР формирует управляющую программу методом от точки к точке, последовательно выводя измерительное устройство, закрепленное на флан 5 10 15 20 25 30 35 40 45 50 це последнего звена ПР, в характерные узловые точки эталонной траектории (последние должны располагаться в пределах пространства, ограниченного диапазоном измерения датчиков и длиной контрольного тела). Показания датчиков в узловых точках эталонной траектории, а также информация о скорости и характере движения между точками заносится в память контрольно-вычислительного устройства,В режиме воспроизведения записанной программы контрольно-вычислительное устройство опрашивает с определенной частотой датчики и записывает их показания в память,После отработки запрограммированной траектории оператор переводит контрольно-вычислительное устройство в режим обработки записанной информации, которая проиэодится следующим образом, Вначале контрольно-вычислительное устройство производит расчет эталонных точек траектории, то есть точек, в которых должен был бы находиться центр СК измерительного устройства при условии идеального соблюдения характера движения между узловыми точками и запрограммированной скорости перемещения. Затем в эталонных точках рассчитываются эталонные ориентации соответствующих координатных осей СК измерительного устройства, Затем, контрольно-измерительное устройство производит расчет фактических положений ориентаций СК измерительного устройства относительно СК контрольного тела.Используя полученную информацию, можно определить любые интересующие пользователя динамические характеристики робота /погрешность отработки траектории, повторяемость траектории и др./,Таким образом, данное техническое решение обеспечивает определение точностных характеристик робота не только в статике, но и в динамике, При этом динамика движения робота может оцениваться для любых видов траекторий/ в том числе, при движении с реверсом, колебаниями и изменением ориентации/, которые не выходят за пределы пространства, ограниченного диапазоном измерения датчиков и длиной контрольного тела,Формула изобретения Стенд для испытания промышленных роботов, содержащий основание, установленное на нем контрольное тело, измерительное устройство, установленное на конечном звене испытываемого робота, при этом контрольное тело и измерительное устройство имеют по три рабочих грани, две изкоторых взаимно перпендикулярны, а на рабочих гранях измерительного устройства установлены датчики близости, связанные с входами контрольно-вычислительного устройства, о т л и ч а ю щ и й с я тем, что, с целью расширения функциональных возможностей, третьи рабочие грани контрольного тела и измерительного устройства расположены под неп рямыми углами к соот ветствующим граням.,Рома гентал Составитель Техред М.М ектор С,Пекарь Редактор Т,Пилипенко Тираж Подписноевенного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб 4/5 каз 3343 ВНИИПИ Гос изв енно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 10
СмотретьЗаявка
4869357, 26.09.1990
ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА
ЦЫРЕНДОРЖИЕВ БАТА РАБДАНОВИЧ, РОМАНЮК АЛЕКСЕЙ ВЛАДИМИРОВИЧ, ГУРСКИЙ КИРИЛЛ ПЕТРОВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: испытания, промышленных, роботов, стенд
Опубликовано: 30.09.1992
Код ссылки
<a href="https://patents.su/4-1764985-stend-dlya-ispytaniya-promyshlennykh-robotov.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для испытания промышленных роботов</a>
Цифровое устройство для обработки сигналов частотных датчиков

Номер патента: 789861
Опубликовано: 23.12.1980
Авторы: Горбанев, Дыбский, Корнич
МПК: G01R 23/00
Метки: датчиков, сигналов, цифровое, частотных
...формирователя 1, элемента 2 ИИЛИ 2, генератора 3 эталонных импульсов, ключевой схемы 4, счетчика 5, выходного регистра 6, блока 7 индикации, рхемы 8 контроля, формирователя 9 временных интервалов, блока 10 управ ления, групп элементов И 11-13, умно жителей 14 и 15, смесителя 16, входной шины (входа) 17, шины 18 управления789861 ИПИ Заказ 9031/43раж 1019 Подписное лиал ППП "Плтоцтд,ж оргд,и, Проев,Устройство работает следующим образом.Сигнал с частотного датчика подается на вход 17 умножителя 15 частоты,где умножается в 1 раз. За счет этогов И раэ увеличивается чувствительностьчастотного датчика. В умножителе14 частоты происходит умножение в и,раэ частоты генератора 3 эталоннойчастоты. умноженные частоты подают"ся на входы смесителя 16...
Устройство для регулирования потока контрольного газа

Номер патента: 1647319
Опубликовано: 07.05.1991
МПК: G01M 3/04
Метки: газа, контрольного, потока
...труба, предназначенная дляпередачи тепла рабочей жидкости 7 при нагреве и съеме тепла в окружающую средупри охлаждении, снабжена перфорированными ребрами 20,Рабочая жидкость 7, заполняющая емкость с сильфоном 5, представляет собойвещество, изменяющее обьем при изменении температуры. При этом величина перемещения конической иглы 4 вдоль. осиотверстия 3 (при изменении температуры на1 К) определяется следующими параметрами: коэффициентом объемного тепловогорасширения жидкости р; объемом емкости ссильфоном 5; площадью среднего сечениясил ьфона 5.Расчет этих параметров производитсяпри разработке устройства для регулирования потока контрольного газа, исходя изтребования обеспечения максимальной чувствительности в заданном...
Устройство для регулирования потока контрольного газа

Номер патента: 1772644
Опубликовано: 30.10.1992
Авторы: Гусев, Кудрявцев, Цветков
МПК: G01M 3/04
Метки: газа, контрольного, потока
...свободным торцом с внутренней торцевой поверхностью стакана, При этом устройство снабжено механизмом фиксации прижимного стакана.Сущность изобретения заключается в регулировании величины теплоотвода от рабочего тела в окружающую среду путем сжатия или разжатия тороидально-цилиндрического сильфона, установленного на торце выступающего конца тепловой трубы соосно ей.На чертеже показано предлагаемое устройство. Устройство для регулирования потока контрольного газа содержит теплоизолированный корпус 1 с отверстием 2 и трубой 3, служащей для отвода контрольного газа к течеискателю. В теплоизолированном корпусе 1 с помощью теплоизолированной втулки 4 жестко закреплена емкость 5. снабженная сил ьфоном 6 и заполненная рабочей жидкостью, С...
Устройство для динамической тарировки пневматических датчиков давления

Номер патента: 731332
Опубликовано: 30.04.1980
Авторы: Бубнов, Быстров, Гимадиев, Головин, Конев, Шорин
МПК: G01L 27/00
Метки: давления, датчиков, динамической, пневматических, тарировки
...на оси 12 в бобышке стоики 13. Диск 8 имеет шлицевой хвостовик, связанный упругой муфтой (допускающей перекос валов) с шлицевым валом основного электродвигателя 10.Качательное движение диска обеспечивается посредством возвратно-поступательного движения роликового блока 14, установленного на направляющей 15. Роликовый блок через вилку 1 б связан с эксцентриковым валом 17. Резиновые ролики 18 установлены на шариковых подшипниках. Вал 1 через подшипниковый блок связан с вспомогательным электродвигателем 19. Ролики устанавливаются в контакте с диском Ь, при этом обеспечивается небольшой натяг.Эксцентриковый вал 17 позволяет осуществлять регулировку амплитуды колебаний диска посредством изменения величины эксцентриситета поворотом оси 20...
Устройство для перекрытия прохода контрольно-пропускного пункта

Номер патента: 1319057
Опубликовано: 23.06.1987
Авторы: Черняев, Шаповаленко
МПК: G07C 9/02
Метки: контрольно-пропускного, перекрытия, прохода, пункта
...относится к автоматическим контрольно-пропускным пунктам для прохода пассажиров и может быть использовано на метрополитене для прекращения доступа пассажиров на эскалаторы при необходимости их остановки в периоды умень щения пассажиропотока. Целью изобретения является упрощение конструкции, уменьшение стоимости и повышение надежности устройства, позволяющего сократить численность обслуживающего персонала на станциях метрополитена и .способствующего комплексной автоматизации станций.На чертеже представлено предлагаемое устройство.Устройство содержит корпус 1, перекрывающую створку 2, выполненную в форме четырехугольника, линейный асинхронный электродвигатель с перемещаемым элементом 3 и индуктором 4, электромагнит 5, подпружиненную...
Предыдущий патент: Привод подвижного звена
Следующий патент: Манипулятор плоскошлифовального станка
Случайный патент: Исследовательский водо-водяной реактор