Система автоматической коррекции положения и траектории движения копировального суппорта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 543497
Автор: Абушенков
Текст
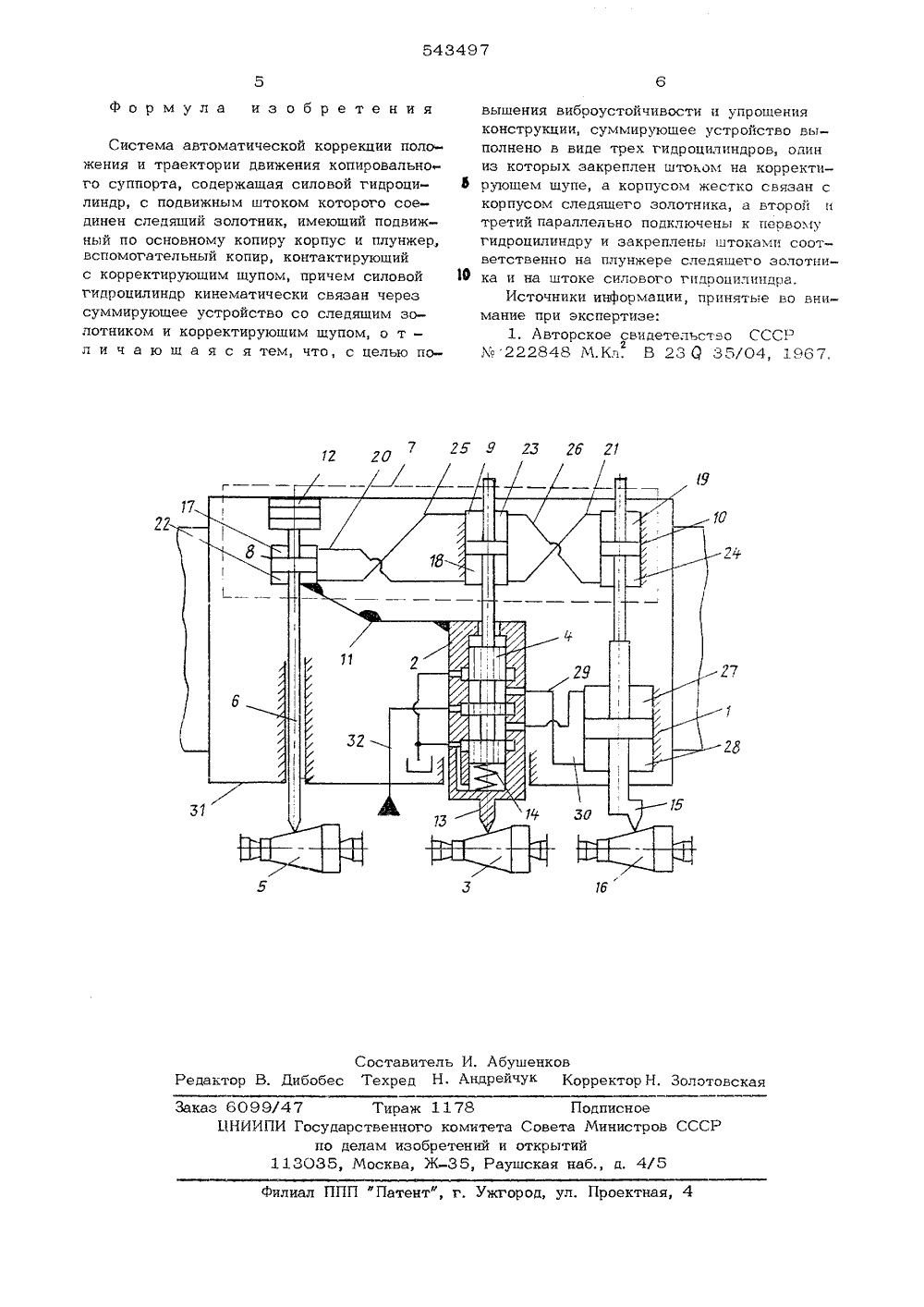
О П И С А Н И Е (11)543497ИЗОБРЕТЕН ИЯ Союз Советских Социалистических Республик(61) Дополнительно к авт, свид-ву75(21) 2123882/08 лено 09 М. Кл.еВ 23 С 3 с присоединением заявкиосударстаенныи комитетСонета Министраа СССРпо делам изобретенийи открытий 3) Приоритет3) Опубликован5) Дата опубликования описания 09,03.77 бушенков(54) СИСТЕМА АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ ПОЛОЖЕНИЯИ ТРАЕКТОРИИ ДВИЖЕНИЯ КОПИРОВАЛЬНОГО СУППОРТА 2 зобретение относится х закреплен шток линдров, один из котор на корректирующем шу ко связан с корпусом ка, а второй и третий чены к первому гидроц ны штоками соответств следующими может быт гидравлическим устроиствамиспользовано, например, в трокопировальных станках. пе, а корпусом жестследяшего золотнипараллельно подклюглиндру и закреплекарных гидической коррижения копи нно на плунжере на штоке силовог я силовой г следяше потника и ом которог гидроцилиндоа, На чертеже да системы. хема предлагаемой имеющий подкорпус и плун- контактирую, причем силоски связан чещим зо 15корсле щупом атичес и положения и тра движенияневысокую ктории имеет копировального порт и сл жн виброустоичивцииЦетойчив ук 2 ко вышен рошени ль изобретения - пости системы и у виброу е конс рукции, Это достигается тем ммирующее ех гидроцито су троиство выполнено в Известна система автомат ции положения и траектории д ровального суппорта, содержа дроцилиндр, с подвижным што соединен следящий золотник, вижный по основному копиру жер, вспомогательный копир, щий с корректирующим щупом вой гидроцилиндр кинематиче рез суммирующее устройство лотником и корректирующимИзвестная система автом Система автоматическои коррекции положения и траектории движения копировального суппорта содержит силовой гидроцилиндр 1, с подвижным штоком которого соединен следящий золотник 2, имеющий подвижный по основному копиру 3 корпус и плунжер 4, вспомогательный копир 5, контактирующий с корректирующим щупом 6, причем силовой гидроцилиндр 1 кинематически связан через суммирующее устройство 7 со следящим золотником 2 и корректирующим щупом 6, Суммирующее устройство 7 выполнено в виде трех гидроцилиндров 8,9 и 10, один из которых закреплен штоком на корректирующем щупе 6, а корпусом жестко связан посредством кронштейна 11 с корпусом следящего золотника 2, а второй и третий параллельно подключены к первому гидроцилиндру 8 и закреплены штоками соответственно на плунжере 4 следящего золотника 2 и на штоке силового гидроцилиндра 1. В качестве вспомогательного копира 5 служит первая деталь, обработанная на том же станке по основному копиру 3. Корректирующий шуп 6 контактирует со вспомогательным кэпиром 5 посредством груза 12, Подви 1 кный корпус следящего золотника 2 поджимается к основному копиру 3 через шуп 13 пружиной 14, расположенной между корпусом и плунжером следящего золотника 2, Шток силового гидроцилиндра 1 жестко связан с поперечньвл суппортом (режущим инструментом) 15, предназначенным для обработки детали 16, Полости 17, 18 и 19 гидроцилиндров 8 - 10 сообщены между собой трубопроводами или гибкими шлангами 20 и 21, а полости 22, 23 и 24 - трубопроводами или гибкими шлантами 25 и 26. Полости 27 и 28 силового гидроцилиндра 1 сообщены трубопроводами (или гибкими шлангами) 29 и 30 со следящим золэтникэм 2. Все гидроцилиндры и следящий зэлотник смонтированы на продольном суппорте 31. Следящий золотник связан с насосной установкой (на чертеже не показана) каналом 32. Диаметры поршней (и штоков) всех трех гидроцилинцров 8, 9 и 10 выполнены одинаковыми с достаточно малой погрешностью; штоки и поршни этих гидроцилиндров герметично уплотнены манжетами или уплотнительными кольцами, исключающими перетечкц и наружные утечки рабочей среды, в качестве которой может быть исполл . зована достаточно вязкая жидкость.Автоматическая коррекция положения и траектории движения копировального суппорта осушествляется следующим образом.При обработке первой детали корректирующий шуп 6 жестко соединен с корпусом гидроцилиндра 8, например, стопорным зажимным винтом или фиксатором ( на чертеже не показано), обработка производится по основному копиру 3. Обрасотанную пеовую деталь 16 устанавлива 1 от в центре и устраняют жесткую связь корректирующего щупа 6 с корпусом гидроцилиндра 8. Затем обрабатывают следующую деталь по двум копирам, Рабочая жидкость по кана.лу 32 поступает под давлением к рабочей щели следящего золотника 2. При рабочей подаче продольного суппорта 31 вправо (по чеотежу) щуп 13 с корпусом следящего золотника 2 смешаются от наклонного участка основного копира 3 вверх, открывая доступ жидкости по трубопроводу 29 в полость 28 силового гидроцилиндра 1, полость 27 которого соединяется через следящий золотник 2 сэ сливом в бак.Ь Суппорт 15 перемещается сэ штоком силового гидроцилиндра 1 вверх вместе с поршнем гидроцилиндра 10, Пои этом рабочая среда из полости 19 по шлангу 21 вытесняется в полость 18, смещая вверх поршень Ю гидроцилиндра 9, а из полости 23 рабочаясреда вытесняется по шлангу 26 в полость 24. Шток гидроцилиндра 9 увлекает вверх плунжер 4 следящего золотника, этим самым осуществляется обратная связь по положению между копировальным щупом 13 и поеречны суппэртом .15 и слежение за профилем основного копира 3. Э это время корректирующий шуп 6 также следит за профилем вспомогательного копира 5 и при одинаковых прсфилчх коп 1: эв 3 ц 5, т,е.при отсутствии погре 1 пнэстей, кэрректирутэший шуп 6 не С 1 лешается Относительно корпуса гидроцилиндра 8. При наличии погрешности корректиру 1 эшцй ,у-.1 6 смешается в Й соответствующую сторону 1 например вверх,если погрешность детали 5 имеет положительный знак) и поршснь гидр:цилиндра 8 вытесняет соответствующую порцию рабо- чРЙ соеды из и лэсти 7 пэ шлангу 20 в ф полость 18, перемещая вверх поошень гидроцилиндра 9.который при этом сообшает плунжеру 4 следящего золотника дополнительное сме 1 це 1 не, в розу 1 ьтатР 1 егэ основ -ное пеэемешение этэгэ плунжера эт гидрэци линдра 10 скорректируется на величину. погрешности первой обрабэтэн 1:.э,. детали, а кспиоовальный суппорт 1 э немедленно отработает это дополнительное смсщение плунжера 4, сняв соответствэ.11 э большой поипуск с Обоабатываемэи летали 16 т. е,40превышение профиля вс,1 эмэгательного копира 5 над профилем основнэто коппра 3вызывает смешение кэРиээ;,льного суппорта 15 в теле эбрабать 1 вае,:. детали 16,45и наэбэрэт,Таким образом осуществ 1 : тся непрерывная коррекция положенЛ.я кэ 1 п рэвальногэсуппорта (режущего инструме та) 15 навеличину отклонсния профиля -".рвой детали, обработанной без коррекп 11;. от профиля основного копира. Отсутствие пространственной системы55поворотных рычагов и толк:.ел .", и отсуствие люфтов и зазоров в кинематическойцепи копировальной системы спосоэстьуетповышению виброустойчивости и упоошает60 констоукцию системы.543497 7 Составитель И. Абушенковбобес Техред Н. Андрейчук Корректор Н. Золотовск Редактор 099/47 Тираж 117НИИПИ Государственного компо делам изобрете113035, Москва, ЖПодписноеитета Совета Министровий и открытий к д. 4/5 аушская Филиал ППП "Патентф, г. Ужгород, ул. Проектная,Формула изобретения Система автоматической коррекции положения и траектории движения копировально го суппорта, содержащая силовой гидроцилиндр, с подвижным штоком которого соединен следящий золотник, имеющий подвижный по основному копиру корпус и плунжер, вспомогательный копир, контактирующий с корректирующим щупом, причем силовой гидроцилиндр кинематически связан через суммирующее устройство со следящим золотником и корректирующим щупом, о т - л и ч а ю щ а я с я тем, что, с целью повышения виброустойчивости и упрощения конструкции, суммирующее устройство выполнено в виде трех гидроцилиндров, один из которых закреплен штоком на корректи-руюшем щупе, а корпусом жестко связан скорпусом следящего золотника, а второй и третий параллельно подключены к первому гидроцилиндру и закреплены штоками соответственно на плунжере следящего золотни ка и на штоке силового гидооцилиндра.Источники информации, принятые во внимание при экспертизе:1. Авторское свидетельство СССРКс 222848 М,Кл, В 23 Я 35/04, 1967,
СмотретьЗаявка
2123882, 09.04.1975
АБУШЕНКОВ ИВАН ДМИТРИЕВИЧ
МПК / Метки
МПК: B23Q 35/04
Метки: автоматической, движения, копировального, коррекции, положения, суппорта, траектории
Опубликовано: 25.01.1977
Код ссылки
<a href="https://patents.su/3-543497-sistema-avtomaticheskojj-korrekcii-polozheniya-i-traektorii-dvizheniya-kopirovalnogo-supporta.html" target="_blank" rel="follow" title="База патентов СССР">Система автоматической коррекции положения и траектории движения копировального суппорта</a>
Следящее устройство к гидрокопировальному суппорту станка

Номер патента: 489289
Опубликовано: 25.10.1975
Автор: Альберт
МПК: B23Q 35/04
Метки: гидрокопировальному, следящее, станка, суппорту
...крец Явному нв продольном супорте 1 в направлении оси 4. В зависимости от впа работ Ось 4 может быть рве Оложенв ЙЕНДИКУЛЯРс ЛИНИИ ЦЕНТРОВ;1 СТ Нка,;- бо под углом к ней, Угол попвчн между напрввлением оси 4 и линией ценров 5останка составл лет, напр мер, 6 О (.На станке выше его станины 1 аспосоположеие которого может лнбым лзВРстныс спосо;ледяцим рычагом 9. Осями его поворотаслужат валики 10 и 11. Проходящая через опорные валики воображаемая ось 12следящего рычага 9 расположена приблизительно перпендикулярно оси 4 передвижения или подачи копировального суппорта 2,На плече 13 следящего рычага 9 укренлен щуп 14. Острие щупа 15.смотрит набоковую сторону копировального шаблона6 и находится эа продольной осью 12 следя цего рычага,Отношение...
Гидроавтоматическое следящее устройство

Номер патента: 1336962
Опубликовано: 15.09.1987
Авторы: Аникин, Матюшкин, Харламов
МПК: A01B 39/16
Метки: гидроавтоматическое, следящее
...гидроцилиндра 4.Основной щуп 5 смещен назад относительно корректирующего щупа 6 навеличину 5 1 и расположен ниже послед -него на величину дЬ, При выполнениикинематической связи щупов 5, 6 сгидрораспределителем 1 в виде шарнирных четырехзвенников основной щуп 5установлен шарнирно на рычаге 19,жестко закрепленном на винте 8, и нарычаге 20, установленном во втулкекронштейна 12. К оси рычага 20 шарнирно приведен поводок 21, соединяющийсяс корректирующим щупом 6, Второй конец щупа 6 шарнирно соединен с рычагом 22, закрепленным на гайке 9.Четырехзвенник основного щупа образован звеньями 12, 19, 20 и 5, аПри обходе наклонных штамбов растений винт 8 и гайка 9 могут поворачиваться в одном и том же направлении, но с разной угловой...
Станок для навивки пружин

Номер патента: 458371
Опубликовано: 30.01.1975
Авторы: Барканов, Карамзин, Кузьмичев, Черчинцев
МПК: B21F 3/04
Метки: навивки, пружин, станок
...механизм поступательного перемещения оправки, копирный механизм, включающий копир и следящий щуп. Недостатком известного станка является ограниченность номенклатуры навиваемых пружин по шагу, трудность переналадки на изготовление пружин различных по диаметру. я от главного вала 9 черезСледящий золотник 7 мов направляющих и связан3 оправки 4 через реечную пружина 12 навивается на оправязанную с главным валом 9.ение оправки 4 осуществляетсдром 1. Щуп 6 следящего золотника 7 скользит по виткам вращающейся модели пружины 5, к которым он прижимается пружиной 13 золотника. По мере вращения модели 5 щуп 6 под действием пружины 13 перемещается вправо и открывает щель следящего золотника 7. Масло от насоса попадает в гидроцилиндр 1, и...
Гидрокопировальный станок

Номер патента: 1690949
Опубликовано: 15.11.1991
Автор: Трутнев
МПК: B23B 3/28
Метки: гидрокопировальный, станок
...дополнительного гидроцилиндра и резца в осевом напраалении предусмотрен шаблон 16 с выступом, прикрепленный к основному гидроцилиндру, а на торце корпуса золотника 14 помещен рычаг 32, взаимодействующий сощупом 15 золотника 14 и выступом шаблона, который фиксирует стержень 26 золотника 14, корпус 12 гидроцилиндра и резец в отведенном крайнем положении.Предварительная подача резца на глубину резания осуществляется вручную с рабочего места токаря вращением винта 33, кинематически связанного с кареткой 2. Установку острия щупа 9 на заданные линейные размеры производят вращением винта 34, установленного на кронштейне неподвижного основания 1.Для фиксации основного гидроцилиндра и соответственно резца предусмотрена плоская пружина 35. На...
Гидрокопировальное устройство к универсальному токарному станку

Номер патента: 132026
Опубликовано: 01.01.1960
Автор: Трутнев
МПК: B23Q 35/16
Метки: гидрокопировальное, станку, токарному, универсальному
...с кареткой верхнего суппорта. Управляющий гидроцилиндром 1 следяший золотник 3 связан со щупом 4, взаимодействуюшим с плоским копиром б, установленны:л на поперечном суппорте станка.Из гидробака б, укрепленного на раме электродвигателя 7, масло через фильтр 8 поступает в гидронасос 9, соединенный при помошн муфты 10 с электродвигателем 7. Из гидронасоса 9 масло подается в полость гидроцилиндра 1 с большим диаметром штока, проходит через дроссельное отверстие в другую переднюю полость гидроцилиндра 1 с малым диаметром штока, из которой поступает в следящий золотк о.При рабочем ходе каретки верхнего суппорта шуп 4, перемешаясь по копиру б, перемещает синхронно подвижной резцедержатель. По окончании рабочего хода рычаг (1,...
Предыдущий патент: Гидросхема уравновешивания вертикальных и наклонных силовых узлов
Следующий патент: Металлорежущий станок
Случайный патент: Преобразователь униполярного кода в биполярный