Модуль манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
) 4 В 25 5 17/О ОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИ К А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(088,8)свидетельство СССРВ 25 1 17/00,(54) МО 157) Из машинос вано пр ляторов УЛЬ МАНИПУЛЯТОРАбретение относится к оброения и может быть испсоздании конструкций мЦелью изобретения являие взаимовлияния перемманипулятора, а именнокорпуса и выходного звеанипулятора содержит ос1321ние и установленный соосно с ним поворотный корпус 2, выходное звено 3 и приводы вращения поворотного корпуса 2 и вращения и качания выходного звена 3, включающие три электродвигателя 4,5 и 6 и трехпоточный дифференциальный механизм с планетарным механизмом развязки движений, включающим соосно установленные на соответствующих коаксиальных валах 7 и 8 и валу общего водила 13 трехпоточного дифференциального механизма три центральных цилиндрических колеса 26, 27 и 28, сателлиты 29,30 и 31 которого взаимодействуют с общим зубчатым колесом 32 с внутренним зацеплением и кинематически связаны с соответствующими валами электродвигателей 4,5845 и 6, Вращение поворотного корпуса 2обеспечивается от электродвигателя 6и далее передается через волновуюпередачу на центральное цилиндрическое колесо 28, жестко связанное с общим водилом трехпоточного дифференциального механизма, Взаимодействиечерез сателлит 31 центрального цилиндрического колеса 28 с общим зубчатымколесом 32 обеспечивает отсутствиевлияния вращения поворотного корпуса 2 на движения выходного звена 3,Вращение и качание выходного звена 3осуществляется от электродвигателеи 4и 5, В зависимости от направления ихвращения обеспечивается вращение иликачание выходного звена. 2 з.п. ф-лы,1 ил.Изобретение относится к машиностроению и может быть использованопри создании и разработке новых конструкций манипуляторов,Цель изобретения - уменьшениевзаимовлияния перемещений звеньев модуля, а именно поворотного корпуса ивыходного звена.На чертеже изображен модуль манипулятора, общий вид, разрез.Модуль манипулятора содержит основание 1 с установленным соосно с нимповоротным корпусом 2, выходное звено 3 и приводы вращения поворотногокорпуса 2 и вращения и качания выходного звена 3,Приводы вращения поворотного корпуса 2 и вращения и качания выходного звена 3 включают три электродви гателя 4 - 6, смонтированные на основании, и трехпоточный дифференциальный механизм с планетарным механизмом развязки движения, На коаксиальных валах 7 и 8, установленных 25 соосно основанию 1, смонтированы центральные конические колеса 9 и 10., взаимодействующие с соответствующими им сателлитами 11 и 12, установленными на общем водиле 13 трехпоточного дифференциального механизма, смонтированном в поворотном корпусе 2 перпендикулярно коаксиальным валам 27 и 8, Сателлиты 11 и 12 посредством зубчато-ременных передач 14 и 15 связань; с входными звеньями 16 и 17 волнового дифференциального механизма, несущими генераторы 18 и 19 волн, взаимодействующие с гибкими колесами 20 и, 21 и жесткими колесами 22 и 23 одновременно. Причем гибкие колеса 20 и 21 жестко связаны с водилам 24 волнового дифференциального механизма, смонти-рованным в поворотном корпусе 2 параллельно общему водилу 13 трехпоточного дифференциального механизма, а жесткие колеса 22 и 23 установлены с противоположных сторон от коническогозубчатого колеса 25, закрепленного навыходном звене 3, и взаимодействующиес ним,На коаксиальных валах 7 и 8 на противоположных концах от центральных конических колес 9 и 10 установлены центральные цилиндрические колеса 26 и 27 планетарного механизма развязки движений, а на валу общего водила 13, установленного внутри коаксиальных валов 7 и 8. закреплено центральное цилиндрическое колесо 28, Каждое из центральных цилиндрическихколес 26 - 28 через сателлиты 29 - 31взаимодействует с общим зубчатым колесом 32, при этом сателлиты 29 и 30посредством водил 33 и 34 и цилиндЗОТак как гибкое колесо 38 закреплено неподвижно на основании 1, то вращение передается на центральное ци-линдрическое колесо 28 и через общееводило 13 трехлоточного дифференциального механизма вращения передаетсяна поворотный корпус 2, Для отсутст-,вия влияния вращения поворотного корпуса 2 на движения выходного звена3 необходимо, чтобы было обеспеченовращение поворотного корпуса 2 ицентральных конических колес 9 и 10с одинаковой угловой скоростью в одном и том же направлении, Это достигается тем,что при вращении центрального цилиндрического колеса 28 вращение передается через сателлит 31на общее зубчатое колесо 32, от которого вращение передается через сателлиты 29 и 30 на центральные цилиндрические колеса 26 и 27 планетарного механизма развязки, которыежестко связаны с центральными коническими колесами 9 и 10 трехпоточного дифференциального механизма. Учитывая, что центральные цилиндрические колеса 26 - 28 имеют одинаковоечисло зубьев, указанное условие будет выполнено,3 13215рических зубчатых передач, включающихзубчатые колеса 35 и 36, взаимодействуют с соответствующими валами электродвигателей 5 и 4,На торцовой поверхности центрального цилиндрического колеса 28 выполнен жесткий зубчатый венец 37,входящий в зацепление с гибким колесом 38 и генератором 39 волн, связанным с валом электродвигателя 6, Генератор 39 волн выполнен в виде дискас закрепленным на его торцовой поверхности нажимными роликами.Модуль манипулятора работает следующим образом 15Вращение поворотного корпуса 2вокруг своей оси вместе с выходнымзвеном 3 осуществляется от электродвигателя 6 вала, который приводитво вращение диск генератора 39 волн. 20Диск воздействует нажимными роликамина гибкое колесо 38, обеспечивая темсамым вращение на нем волны участковгибкого колеса 38, т.е. вращениеучастков контакта торцовой нарезкигибкого колеса 38 с торцовым венцом37 центрального цилиндрического колеса 28 планетарного механизма развязки. 84Вращение выходного звена 3 вокруг своей оси осуществляется от электродвигателей 4 и 5, приводящих . во вращение зубчатые колеса 35 и 36, водила 33 и 34, сателлиты 29 и 30, которые обкатываются по общему зубчатому колесу 32, центральные цилиндрические колеса 26 и 27, центральные конические колеса 9 и 10, сателлиты 1 и 12, зубчато-ременные передачи 14 и 15, и вращение передается на входные звенья 16 и 17, которые телами качения генераторов 18 и 19 волн, воздействуя на гибкие колеса 20 и 21 приводят во вращение жесткие колеса 22 и 23, При этом необходимо, чтобы последние вращались в противоположные стороны. Вращение жестких колес 22 и 23 в противоположные стороны вызывает вращение конического колеса 25, а следовательно, и самого выходного звена 3 ротация звена 3),Изменение направления вращения одного из электродвигателей, например обеспечит вращение жестких колес 22 и 23 в одну сторону, в результате чего осуществляется качание выходного звена 3 вокруг водила 24.Таким образом, модуль манипулятора обеспечивает вращение (ротацию) выходного звена 3 вокруг своей оси при вращении жестких колес 22 и 23 в противоположные стороны, качание его относительно поворотного корпуса 2 при вращении колес 22 и 23 в одну сторону и вращение выходного звена 3 вместе с поворотным корпусом 2 вокруг оси последнего. Формула изобретения 1, Модуль манипулятора, содержащий основание, установленный ча нем поворотный корпус, выходное звено и приводы вращения корпуса и вращения и качания выходного звена, включающие три электродвигателя, смонтированные на основаниии, и трехпоточный дифференциальный механизм с коаксиальными валами, центральный вал которого является валом общего водила, а на двух других установлены центральные конические колеса, кинематически связанные с сателлитами, установленными с возможностью вращения на общем водиле, причем на последнем закреплен поворотный корпус, в котором установлен волновой дифференциальный меха1321584 Составитель А,Ширяева Техред И,Попович 1(орректор С.Черни Редактор В.Петраш Заказ 2707/10 Тираж 953 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д,4/5Производственно-полиграФическое предприятие, г,ужгород, ул,Проектная,4 низм, при этом его входные звеньякинематически связаны с соответствующими сателлитами трехпоточного дифференциального механизма, а жесткиеколеса установлены на водиле волнового дифференциального механизма свозможностью вращения относительнонего и входят в зацепление с коническим зубчатым колесом, смонтированным Йа выходном звене, о т л и ч а -ю щ и й с я тем, что, с целью уменьшения взаимовлияния перемещений."веньев, он снабжен планетарным механизмом развязки движений, выполненным в виде трех центральных цилиндрических колес, установленных на соответствующих коаксиальных валах ивалу общего водила, и сателлитов,установленных с возможностью взаимодействия с общим зубчатым колесом,расположенным с возможностью вращения на основании, причем водила сателлитов кинематически связаны с соответствующими валами электродвигателей.2. Модуль по п.1, о т л и ч а ющ и й с я тем, что центральное цилиндрическое колесо планетарного механизма связано с выходным валом электродвигателя привода вращения корпуса пбсредством волновой переда чи, жесткий зубчатый венец. которойвыполнен на торце центрального цилиндрического колеса, а генератор волн установлен на выходном валу электродвигателя.15 3. Модуль по п.1, о т л и ч а ющ и й с я тем, что кинематическая связь водил планетарного механизма развязки движений с соответствующими 20 валами электродвигателей выполненав виде зубчатых цилиндрических передач,
СмотретьЗаявка
3975741, 14.11.1985
ПРЕДПРИЯТИЕ ПЯ А-1477
ДЬЯКОВ ИГОРЬ ИВАНОВИЧ, СУШКЕВИЧ ИГОРЬ ВЯЧЕСЛАВОВИЧ, СЛЮСАРЬ ЛЮДМИЛА НИКОЛАЕВНА, ЯКИМОВИЧ СЕРГЕЙ КОНСТАНТИНОВИЧ
МПК / Метки
МПК: B25J 17/00
Метки: манипулятора, модуль
Опубликовано: 07.07.1987
Код ссылки
<a href="https://patents.su/4-1321584-modul-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Модуль манипулятора</a>
Способ преобразования кинетической энергии звеньев механизма в потенциальную и наоборот и устройство для его осуществления

Номер патента: 932026
Опубликовано: 30.05.1982
Авторы: Понюняев, Хлевнюк, Янковский
МПК: F16H 33/02
Метки: звеньев, кинетической, механизма, наоборот, потенциальную, преобразования, энергии
...19, и цикл с ускорением вращения маховика повторяется, При достижении маховиком 2 расцетной скорости, т.е. когда время прохождения маховика 2 от точки 21 до точки 22 любого из секторов У 1 и У 2 становит.- ся равным времени импульса устройство входит в стационарный режим. Так как скорости перемещения маховика 2 и импульса, передаваемого ему от платформы 8, сравнялись, то маховик 2 уже не получает разгонного импульса, и энергия цилиндров 15 и 16 тратится только на изменение наклона платформы 8 и подъем маховика 2 без разгона последнего. Перед подключением устройства к ведомому звену 3, например 1, к прессу, упоры-ограничители 5 и 6 одновременно выдвигаются вверх, и платформа 8 выставляется в горизонтальное положение, затем...
Приспособление для суммирования скоростей вращения валов двух механизмов

Номер патента: 79965
Опубликовано: 01.01.1949
Автор: Уланов
Метки: валов, вращения, двух, механизмов, скоростей, суммирования
...которой тактке имеет торцовый зуо.Шесернпостоянно находтся в зацеплен;1 и с шестерней вала 4, вращающегося с углогои скоростью Если направления вращений валов противоположны, то замыкания контактов К, вызывае.ды аксиальпым смещением шестерни 3, олагодаря паличшо торцовыхн 1+ о) зубьев происходтт с частотой Е - , . Если направления вращений г,алов одинаковы, то астота замыка 1 шй контакта составляег) - . И2 - .Возврат шестерни 3 в первоначальное положение после замыканР 1 я контактов Осуществляется контактноп пруи(ИНОЙ, котора 5 также является и возвратной.Предмет изобретенияПриспособление для суммирования скоростей вращения валов двух механизмов путем преобразования суммарной скорости в частоту электрР 11 ескР 1 х импульсов, О тл и ч а ю...
Устройство для управления скоростью вращения электродвигателя лентопротяжного механизма

Номер патента: 615532
Опубликовано: 15.07.1978
Авторы: Богатырев, Никитченко, Родзинский, Юрасов
МПК: G11B 15/46
Метки: вращения, лентопротяжного, механизма, скоростью, электродвигателя
...чертеже показан вариант описываемого. устройства, содержащего источник питания , подключенный к блоку электродвигателя 2, выполненному с управляющим вхо. дом. Блок электродвигателя 2 состоит. изусилителя мощности и из электродвигателя, смонтированного с возможностью перемещения магнитной ленты, Блок электродвигателя 2 соединен через частотно-зависимый дат О чнк скорости вращения 3, например синхрон.ный тахогенератор с входом частотного дис.криминатора 4.Источник питания 1 соединен через аттенюатор 5 и первый резистор 6 с входом 2операционного усилителя 7, выход которого615532 формула изобретения Составитель Е. РозановТекред О. Луговая Корректор Тираж 717 Подписное Редактор С. ХейЗаказ 3916/41 ИПИ, Государственного по делам...
Перестановочный механизм для поворотных лопаток рабочего колеса водяных турбин

Номер патента: 43613
Опубликовано: 30.06.1935
Автор: Энглессон
МПК: F03B 15/00, F03B 3/14, F15B 11/15
Метки: водяных, колеса, лопаток, механизм, перестановочный, поворотных, рабочего, турбин
...под давлектнем масло труоы 2,Изображенная на фиг. " форма выполнения предмета предлагаемого изобретения отличается от вышеприведенной только тем., что верхнее отверстие 5 канала 5 расположено на цилиндрической наружной поверхности поршневого штока 4 днференциального поршня 1, а та)1;)те таким устройством ттомсщающегос я на нижнем конце трубы 2 золотника с заплечиками 8, благодаря 11 оторому, в зависимости от положения золотит)1;а, расположенная под поршнем полость 7 цилиндра может сообщаться либо с кольцевым каналом 13 внутри турбинного вала 3, либо через канал 6 с верхней полостью 9 того же цилиндра, Подвод находящегося под давлением масла происходит через кольцевой канал 13, для удаления же масла служит соединительная труба 2....
Формирователь выходного сигнала дифференциально трансформаторных датчиков
Номер патента: 583373
Опубликовано: 05.12.1977
Авторы: Лернер, Мальцев, Павлов, Цивьян
Метки: выходного, датчиков, дифференциально, сигнала, трансформаторных, формирователь
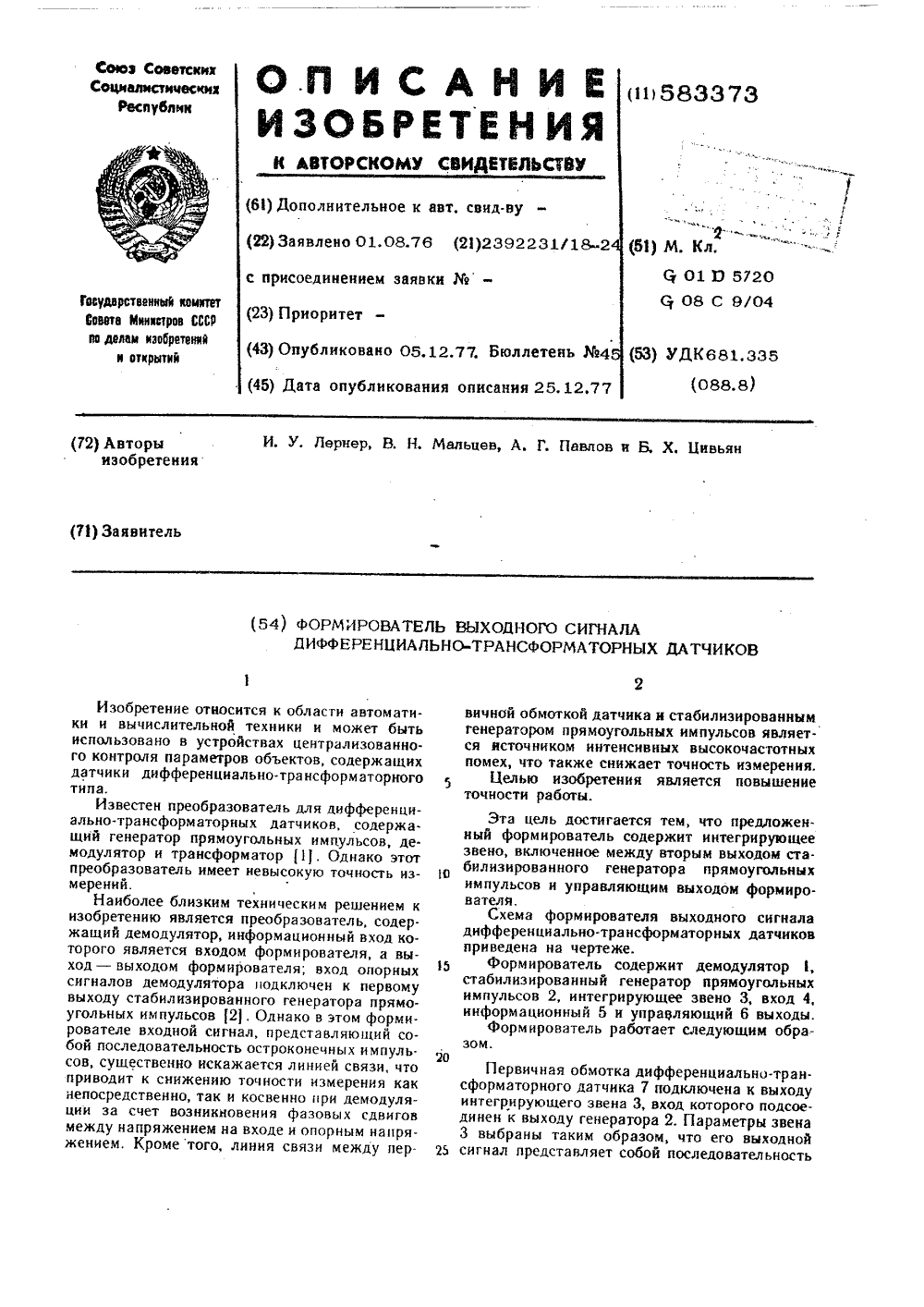
...напряжением. Крометого, линия связи между пер Ь личной обмоткой датчика и стабил генератором прямоугольных импу ся источником интенсивных выс помех, что также снижает точносЦелью изобретения является точности работы. Эта цель достигается тем, что предложеный формирователь содержит интегрирующее вено, включенное между вторым выходом ста. илизированного генератора прямоугольных импульсов и управляющим выходом формирователя.Схема формирователя выходного сигнала дифференциально-трансформаторных датчиковриведена на чертеже.Формирователь содержит демодулятор 1, стабилизированный генератор прямоугольныхмпульсов 2, интегрирующее звено 3, вход 4, информационный 5 и управляющий 6 выходы.Формирователь работает следующим обраом.583373 Формула...
Предыдущий патент: Схват манипулятора
Следующий патент: Шарнир
Случайный патент: Двухтактный реверсивный счетчик