Способ регулирования углового положения ротора двигателя двойного питания
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
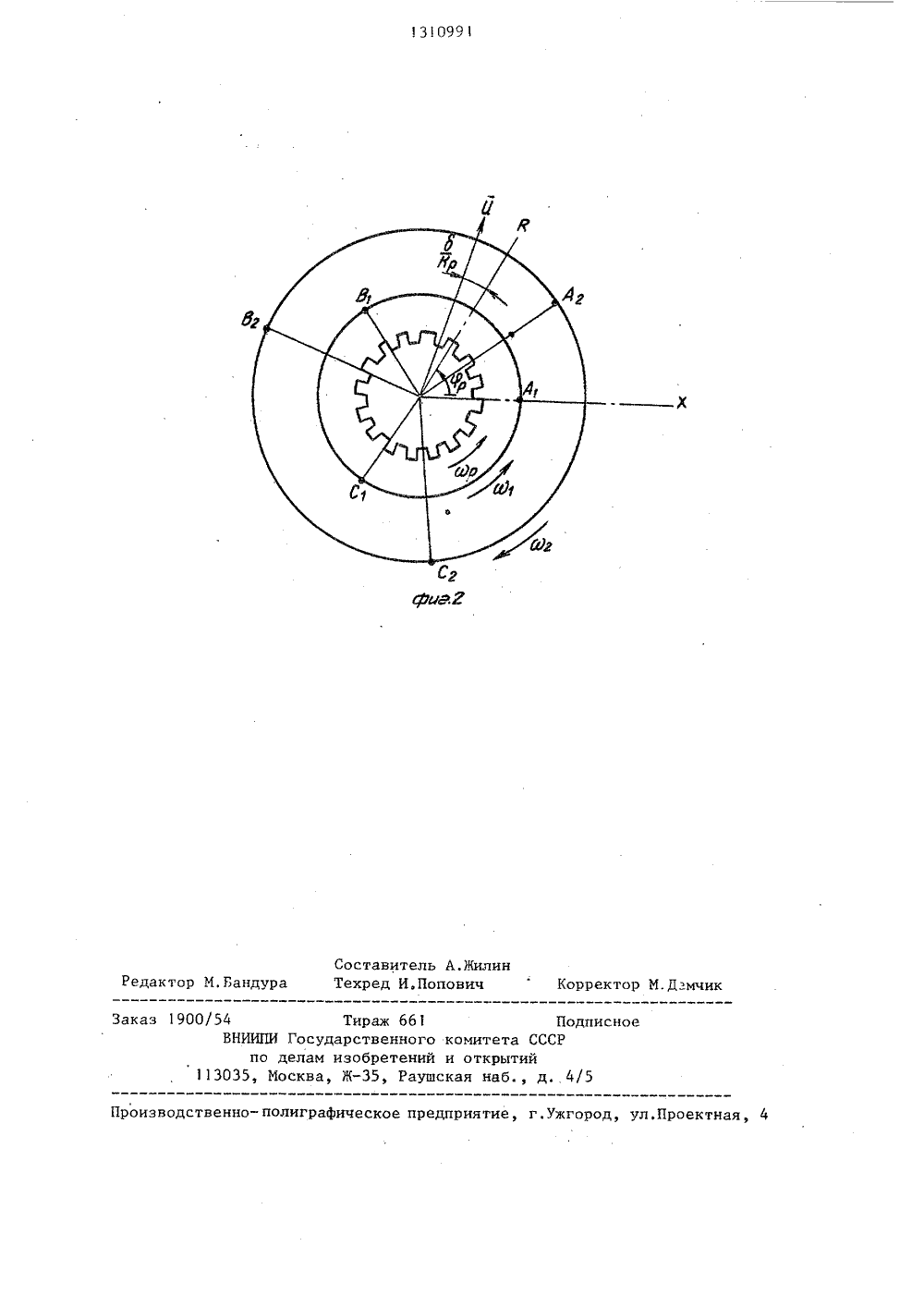
(50 4 Н 02 Р 7/46 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТЮОПИСАНИЕ ИЗОБРЕТЕНИЯн двтотсновт сввотвъствт(54) СПОСОБ РЕГУЛИРОВАНИЯ УГЛОВОГОПОЛОЖЕНИЯ РОТОРА ДВИГАТЕЛЯ ДВОЙНОГОПИТАНИЯ(57) Изобретение относится к электро,технике и может быть использовано при создании низкоскоростных следящих систем на основе двигателей двойного питания. Целью изобретения является повышение точности регулирования. Способ регулирования угловогоположения ротора двигателя двойногопитания с двумя многофазными обмотками заключается в том, что на обмотки в начальный момент регулированияподают напряжения, разность междукоторыми пропорциональна частоте вращения, контролируют угловое положение ротора, дополнительно подсчитывают число периодов питающихпеременных напряжений, определяютразность чисел периодов и при достижении углового положения ротора иразности чисел периодов заданныхзначений устанавливают частоты переменных питающих напряжений равными.2 ил, 131Изобретение относится к электротехнике, а именно к управляемому электроприводу переменного тока, и может быть использовано, в частности, при создании низкоскоростных следящих систем на основе двигателей двойногопитания.Целью изобретения является повышение точности регулирования.На Фиг,1 представлена функциональная схема устройства, реализующегопредлагаемый способ ; на фиг.2диаграмма, поясняющая способ.Устройство, реализующее способрегулирования углового положения ротора двигателя 1 двойного питания(Фиг.) с двумя трехфазными обмотками Л В С и Л 2 Вг С , расположенными на статоре, и зубчатым ротором,содержит автономный инвертор 2 ссистемой управления 3 на входе, подключенный к трехфазной обмотке АВ С,и автономный инвертор 4 с систе.мой управления 5 на входе, подключенный к трехфазной обмотке АгВ 2 Сг,Входысистем управления 3 и 5 подключенык выходам регуляторов 6 и 7 соответственно, Блок задания 8 подключенвыходом к первым входам регуляторов6,7 и к первому входу блока управления 9, второй и третий входы которого соединены соответственно с однимиз фазных выходов автономного инвертора 2 (фаза А) и автономного инвертора 3 (Фаза А ), Выход блока управления 9 подключен к вторым входамрегуляторов 6 и 7,На диаграмме (фиг.2) представленовзаимное расположение трехфазных обмоток ЛВС и А 2 ВгСг на статоре.Все углы измеряются относительно осиХ, связанной со статором, противнаправления вращения, часовой стрелки.Ось К жестко связана с ротором, и заугол поворота принимается угол междуосями К и Х, Ротор вращается вместес обобщенным вектором напряжения 11со скоростью, определяемой для установившегося режима по формулес,- сги (1)кргде 4 и)г- угловые частоты напряжений питания соответственно первой и второй обмоток;К Р - коэффициент электрической редукции, равный для индукторного двигателя двойного питания числу зубцов ротора, а для двигателя двой 0991 2ного питания на базе асинхронногодвигателя с Фазным ротором - числупар полюсов.Угол сР - электрический угол нагрузки двигателя двойного питания,определяемый различием в угловом полокении обобщенного вектора напряжени и ротора двигателя, вызываемымнагрузкой. В общем случае имеем 10 с 1 бК с - (со - и) ) . (2)д р Р2Из (2) получаемД= К с. Й 1 - (с, -4 г)йс.Р15 р фК Лс 1 ррф -2 Н( -- -)-9=РКР ь РР + с 1 ро я (и-иг )- ,где ср, - начальный угол поворота ротора;Л ф - приращение угла поворотаротора;начальная фаза питающего напряжения;Т, Т 2 - периоды питающих напряжений;и,и г - числа соответствующихпериодов за времяТак как ср,= с, + сР/КР, то из(2) получаем2 адр = --- (и -и ). (ЗЗР КгРОтсюда следует, что приращениеугла поворота пропорционально разности чисел периодов, подсчитанных завремя регулирования, и обратно пропорционально коэффициенту электрической редукции. Поэтому разностьчисел периодов зависит от заданногоприращения угла следующим образом:Крди = и - и = - :Все1 2 27 Р(4)Для отработки перемещения на уголдскб в соответствии со способом опреРделяют д и с учетом зависимости (4),задают рассогласование по частотемежду напряжениями питания обмоток,подсчитывают и, и иг и определяюттекущее значением:и -иг. После достижения дп=Ли частоты питанияустанав.ливают одинаковыми .К этомумоменту ро -тор двигателя повернется на угол ЬРР,Устройство, реализующее способуправления, работает следующим об ра омС блока задания 8 (фиг.1) поступает сигнал, определяющий требуемоеперемещение ротора, В соответствиис этим сигналом регуляторы 6 и 73изменяют частоты питания обмоток двигателя 1 таким образом, чтобы возникло рассогласование по частоте. Системы управления 3 и 5 передают соответствующие задания на автоном ные инверторы 2 и 4 и двигатель 1 начинает вращаться. С момента формирования рассогласования по частоте в блоке управления 9 производится подсчет чисел периодов питающих на- Ю пряжений и определяется их разность в соответствии с (3), Когда вычисляемое значение дп сравнивается с заданным дп, на выходе блока управления 9 появится сигнал, поступающий 15 на вторые входы регуляторов 6 и 7. В соответствии с этим сигналом по заложенному в блок управления 9 и регуляторы 6 и 7 зако. ну рассогласование частот сводит ся к нулю и обе обмотки будут питаться токами одинаковой частоты. Двигатель 1 остановится и перейдет в режим синхронного стояния. Отработка заданного перемещения окончится. 25Режим работы двигателя в этом случае фактически соответствует шаговому. Из (3) видно, что угол поворота не зависит от частот питания и полностью определяется только числами 30 периодов питающих напряжений, т.е, устройство по существу работы является дискретным. 3109 Таким образом, использование информации о числах периодов питающих 91 4напряжений позволяет повысить точность регулирования углового положения ротора двигателя двойного питания, причем достигается это беэ установки дополнительных датчиков положения.Формула изобретенияСпособ регулирования углового положения ротора двигателя двойного питания с двумя многофазными обмотками, при котором на многофазные обмотки двигателя двойного питанияподают отдельные питающие переменные напряжения с частотами,разность величин которых пропорциональна частоте вращения ротора, контролируют угловое положение ротора, сравнивают его с заданным значением и при достижении углового положения ротора заданного значения устанавливают частоты питающих переменных напряжений равными, отличающийся тем, что, с целью повышения точности регулирования, дополнительно подсчитывают число периодов питающих переменных напряжений, определяют разность чисел периодов, а уравнивание частот питающих переменных напряжений осуществляют по достижении разности чисел периодов указанных напряжений заданного значения, пропорционального требуемому приращению угла поворота ротора и коэффициенту электрической редукции.1310991 ставитель А,Жилхред И,Попович Редактор М.Бандура ректор М Д мчик Заказ 1900/5 аж 661венного комитета Сретений и открытий5, Раушская наб.,Тир Государст елам изоб сква, Ж
СмотретьЗаявка
3993683, 20.12.1985
КРАСНОЯРСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
БРОНОВ СЕРГЕЙ АЛЕКСАНДРОВИЧ, СОУСТИН БОРИС ПОРФИРЬЕВИЧ, ПАНТЕЛЕЕВ ВАСИЛИЙ ИВАНОВИЧ, ЗАБУГА ВИКТОР АЛЕКСАНДРОВИЧ, ЧЕНЦОВ СЕРГЕЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: H02P 7/46
Метки: двигателя, двойного, питания, положения, ротора, углового
Опубликовано: 15.05.1987
Код ссылки
<a href="https://patents.su/4-1310991-sposob-regulirovaniya-uglovogo-polozheniya-rotora-dvigatelya-dvojjnogo-pitaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ регулирования углового положения ротора двигателя двойного питания</a>
Способ регулирования углового положения ротора двигателя двойного питания
Номер патента: 1372582
Опубликовано: 07.02.1988
Авторы: Бронов, Забуга, Пантелеев, Соустин
МПК: H02P 7/46
Метки: двигателя, двойного, питания, положения, ротора, углового
...регулированием (путем изменения частоты питания), что наиболее точно соответствует требованиям следящих систем, в которых требуется управлять непосредственно углом поворота, а не частотой вращения (управление частотой вращения также бывает необходимо в переходных режимах, но имеет подчиненный характер).Предлагаемый способ обеспечиваетпрямое управление именно углом поворота, минуя операции задания частоты вращения изменения частоты, измерения углового положения и выдачи команды на стопорение двигателя (перевод его в режим синхронного стояния). Закон изменения фазового сдвига во времени может быть самым разнообразным в зависимости от заданного угла поворота, требований к динамическим и энергетическим характеристикам в переходных режимах...
Способ регулирования углового положения ротора двигателя двойного питания

Номер патента: 1436265
Опубликовано: 07.11.1988
МПК: H02P 7/46
Метки: двигателя, двойного, питания, положения, ротора, углового
...подключен к первому входу пер- вого блока 9 сравнения, к второму входу которого подключен выход блока О задания угла поворота. Выход первого блока 9 сравнения соединен с первым входом регулятора 11 фазового сдвига, Выход датчика 8 угла поворота подклю" чен также к информационному входу блока 12 памяти и первому входу второго блока 13 сравнения, к второму входу которого подключен выход блока 12 памяти. К входу записи блока 12 памяти подключен третий выход блока 7 задания фазового сдвига, Выход второгоблока 3 сравнения соединен с первымвходом блока 14,сравнения, с вторым входом которого соединен выход блока15 вычисления заданного шага. Выход третьего блока 14 сравнения подключен к второму входу регулятора 1 фазового сдвига, выход...
Способ регулирования углового положения ротора двигателя двойного питания

Номер патента: 1524153
Опубликовано: 23.11.1989
Автор: Бронов
МПК: H02P 7/46
Метки: двигателя, двойного, питания, положения, ротора, углового
...вычисления ошибки по углу поворота - выходдатчика 11 угла поворота, механически связанного с ротором двигателя 1двойного питания, Выход блока 9 вычисления ошибки по углу поворотаподключен к входу блока 12 взятия модуля, а также к первым входам логического блока 13 и блока 4 задания фазового сдвига, К вторым входам логического блока 13 и блока 14 заданияФазового сдвига подключен соответственно первый и второй выходы блока5 сравнения, К третьему входу логического блока 13 подключен выход определителя 16 знака угла нагрузки, входкоторого соединен с выходом датчика17 угла нагрузки, содержащего фазовыйдетектор 18, выход которого являетсявыходом датчика 17 угла нагрузки, исумматор 19, выход которого соединенс первым входом Фазового...
Способ регулирования углового положения ротора двигателя двойного питания

Номер патента: 1541752
Опубликовано: 07.02.1990
Автор: Бронов
МПК: H02P 7/46
Метки: двигателя, двойного, питания, положения, ротора, углового
...или амплитудно-модулированных по синусоидальному закону, то существует минимальное значение приращения фазы (фазовая дцскрета) для каждого иэ питающих напряженцйт т Ю 1 мини й т- фазовые дискреты соответственно первого ц второго питающих напряжений;9 15417и и и - число тактовых импульсовгв периоде первой гармоники соответственно первогои второго питающих напряжений,5Изменение фазы каждого питающего,напряжения осуществляется дис.кретно,а величины дискрет определяются в соответствии с (4). ОС учетом выражений (3) и (4) результирующая фаэовая дискрета доп".ределяется следующим образом: 5а элементарный шаг двигателя двойногопитания мцн г Чймин(6) 2 Го( =К (и + ап)РЭлементарный шаг переменного ротора двигателя двойного...
Датчик положения ротора для привода с машиной двойного питания

Номер патента: 1111234
Опубликовано: 30.08.1984
Автор: Юрьев
МПК: H02K 29/02
Метки: датчик, двойного, машиной, питания, положения, привода, ротора
...предлагаемого датчика.Электромеханический фазовращатель1, питаемый от неуправляемого генератора 2 частоты, жестко сочленен с валом электрической машины 3. Статорные обмотки машины 3 подключены кпитающей сети лерез датчик 4 фазывектора статорного тока, а роторныек преобразователю 5 частоты. Выход3 1111 ной сигнал фазовращателя 1 поступает на первый вход фазочувствительного выпрямителя 6, второй вход которого подключен к выоду фазосдвигающего устройства 7. Выходной сИгнал фазочувствительного выпрямителя 6 через устройство 8 перемножения поступает на вход преобразователя 5 частоты. Вход фазосдвигающего устройства 7 соединен с выходом управляемого гене-О ратора 9 частоты и входом первого сумматора 10, второй вход которого...
Предыдущий патент: Электропривод переменного тока с частотно-токовым управлением
Следующий патент: Устройство для управления многодвигательным приводом
Случайный патент: Подъемник для транспортировки корреспонденции