Способ регулирования углового положения ротора двигателя двойного питания
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
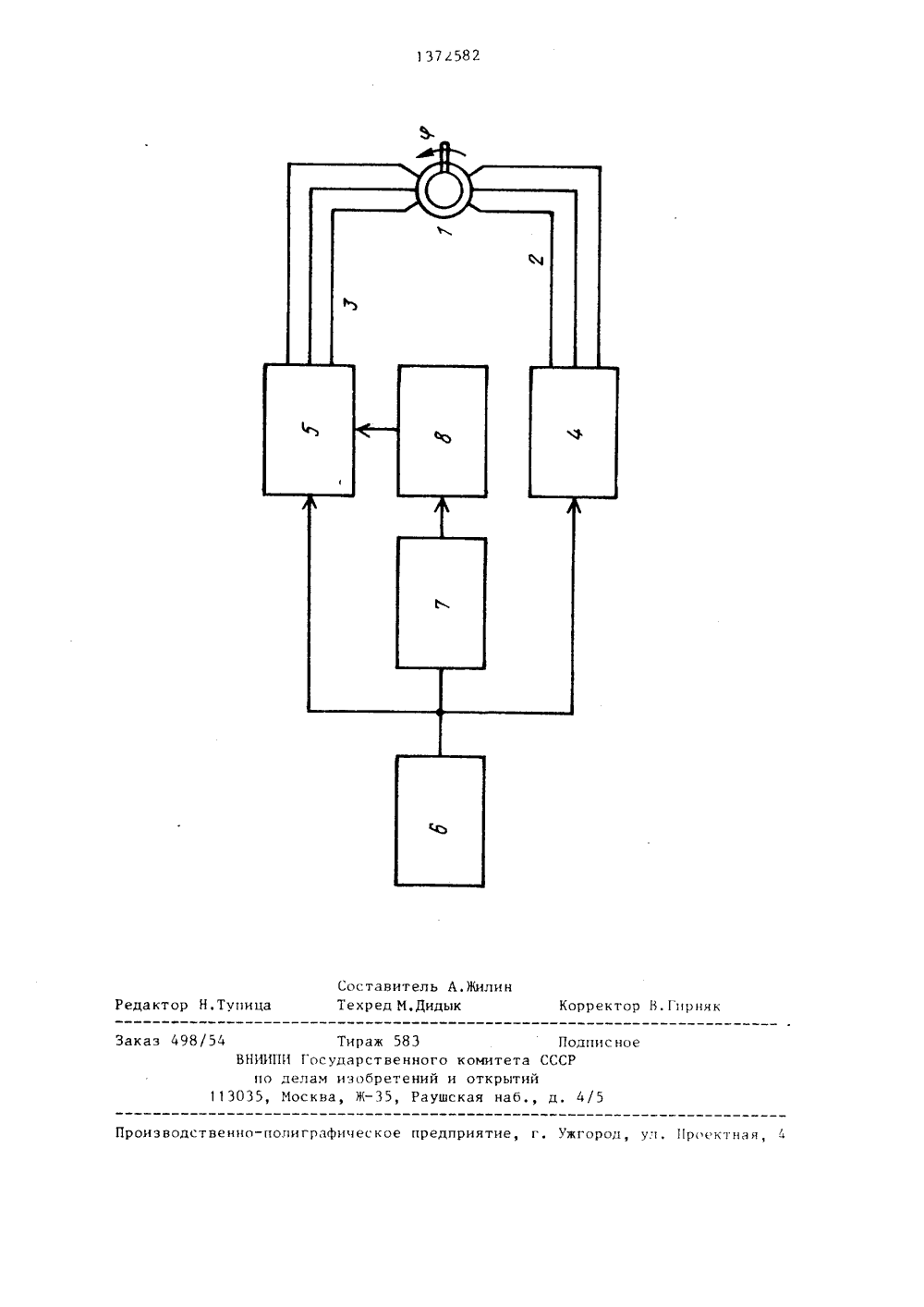
)льство СССР7/б, 1985.с тво СССР7/чб, 1982. ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ А ВТОРСКОМУ С 8 ИДЕТЕЛЬСТВ(57) Изобретение относится к электротехнике и может быть использовано вследящих системах. Целью изобретенияявляется повышение точности регулирования углового положения ротора двигателя двойного питания. Цель достигается тем, чт, в б в .особе регулирования углового положения ротора двига ЯО 1372582 теля двойного питания (.ДП) частоты питающих напряжений устанавливаютдинаковыми, с беспечивая режим начального стояния ДДП, в начале регулирования в качестве регулируемого параметра одного иэ питающих напряжений используют фазовый сдвиг в пределах одного электрического периода, Величину фазового сдвига изменяют пропорционально требуемому углу поворота ротора и коэффициенту электрической редукции Д.1 П, а режим синхронного стояния для ПДП обеспечивают установкой частот питающих напряжений равными. При данном способе регулируется само угловое перемещение ротою ра и исключаются промежуточные операции задания частоты вращения, частоты питания, измерения углового положения ротера, а вместе с тем и сшибки. ДДП все время находится в режиме синхронного стояния, что гарантирует фиксацию ротора именно в заданном положении. 1 з.п. ф-лы, 1 ил.Изобретение относится к электротехнике, а именно к управляемомуэлектроприводу переменного тока, иможет быть использовано, в частности,при созданиии низкоскоростных следящих систем с исполнительными двигателями двойного питания,Цель изобретения - повышение точности регулирования углового положе. 10ния ротора двигателя двойного питания.Ва чертеже представлена функциональная схема электропривода с двигателем двойного питания.Электропривод содержит двигатель 1 1 гдвойного питания обмоткой 2 возбуждения и обмоткой 3 управления, подключенными к выходам инверторов 4 и 5соответственно. Выход задающего генератора 6 подключен к входам задания 20частоты инверторов 4 и 5 и к входублока 7 задания приращения угла поворота. Выход блока 7 задания приращения угла поворота соединен с входомблока 8 регулирования фазового сдвига, подключенного выходом к входурегулирования фазы инвертора 5.Способ регулирования углового положения ротора осуществляют следующим образом. 30Каждую из двух многофаэных обмотокдвигателя двойного питания запитывают от отдельного источника питающегопеременного напряжения, Задают частоты указанных питающих переменных напряжений одинаковыми, устанавливая тем самым режим синхронного стояния двигателя двойного питания.В начале регулирования углового положения ро 1 ора в пределах одного 40 электрического периода устанавливают фазовый сдвиг между питающими переменными напряжениями, величина которого пропорциональна требуемому углу повоРота РотоРа и коэффициенту электрической редукции.После этого вновь устанавливают режим синхронного стояния двигателя двойного питания, устанавливая частоты обитающих переменных напряжений одинаковыми.Рассмотреньй способ позиционирования двигателя двойного питания фактически реализует шаговый режим работы с шагом, кратным задаваемому фазо вому сдвигу. В начале и в конце регулирования двигатель двойного питания находится в режиме синхронного стояния за счет равенства частот питания обеих обмоток. При изменении фазового сдвига возникает мгновенный импульс момента, приводящий к появлению ускорения частоты вращения и повороту ротора на заданный угол. Изменение фазового сдвига означает фактически разовое изменение одного периода регулируемого напряжения, т.е. изменение его частоты на этом периоде. Однако уже на следующем периоде значение частоты восстанавливается, а при равенстве частот двигатель находится в режиме синхронного стояния, поэтому ротор останавливается и фиксируется в новом положении,Таким образом достигается точное позиционирование двигателя без введения обратной связи по углу пово,рота. В частном случае при питании двигателя широтно-модулированным напряжением фазовый сдвиг изменяют дискретно через фиксированные интервалымежду тактовыми импульсами (т.е.,через интервалы, кратные периоду тактового генератора широтно-импульсного модулятора). В этом случае по своим характеристикам электропривод двигателя двойного питания оказываетсяпохож на дискретный электропривод сшаговым двигателем,Вынужденная составляющая частотывращения в двигателе в общем виде приразличных частотах питающих напряжений определяется следующим выражением:ы,(с) - ыг(с)м (Е)%где С - время;частота вращения ротора;ы, и ы, - круговые частоты напряженийвозбуждения и управления соответственно; К - коэффициент электрической редукции (для двигателя на основе асинхронного двигателя с фазным ротором коэффициент электрической редукции равен числу пар полюсов обмотки статора, а для двигателя с электромагнитной редукцией скорости - числузубцов ротора).Частоты питающих напряжений задают одинаковыми, т,е. и,= ы, поэтому в соответствии с (1) ротор двигателя неподвижен (режим синхронного стоя 1372582ния), Формулу для угла поворота ротора получают, интегрируя выражение(г.) =ц (ь) -) (г.) +(2)Кфгде- начальный угол поворотаР,оротора,и- текущие значения фаз напряжений возбуждения и управления соответственно 15(измерение всех углов ведется относительно общейоси координат, связаннойсо статором).В процессе работы иэ-за изменения 2 Опараметров инверторов фазовые сдвигиц (Г) и Ю, могут меняться, но прижесткой синхронизации частот возбуждения и управления закон измененияфаэ во времени всегда один и тот же: 25ч(г) =(г.) = 4(Т). Поэтому обеспечивается неподвижное состояние ротора - режим синхронного стояния.Если одному из фазовых сдвигов,например , придать некоторое допол Онительное йриращение л ц(воздействуюттолько на напряжение управления, оставляя параметры напряжения возбуждения неизменными), т.е. законы изменения фаз во времени становятся следующими:ц, = )(г.)Р= Ч(г) + дч (3) то в соответствии с выражением (2) происходит перемещение ротора на 4 О угол, пропорциональный этому приращению фазового сдвига и обратно пропорциональный коэффициенту электрической редукции. Это означает, что задаваемое приращение фазового сдвига долж но быть пропорционально требуемому углу поворота и коэффициенту электрической редукции.Поскольку частоты возбуждения и управления всегда поддерживаются одинаковыми, сразу после окончания поворота двигатель вновь переходит в режим синхронного стояния. Приращение фазы фактически является приращением одного из периодов напряжения управ 55 ления, т.е. изменением его частоты. Это приводит к появлению мгновенного импульса частоты вращения. Однако уже на следующем периоде частота напряжения управления восстанавливается и вновь становится равной частоте напряжения возбуждения, Если импульс частоты вращения был таким, что двигатель не выпал из синхронизма (а это всегда может быть обеспечено выбором элементарного приращения фазы), то ротор поворачивается на угол 3 ц/Кги останавливается. Если продолжать постоянно изменять фазовый сдвиг ц в соответствии с (3), то это означает фактически изменение частоты напряжения управления,и возникает постоянное вращение ротора в соответствии с (1), что соответствует обычному режиму работы двигателя с разными частотами питания.Регулирование с помощью изменения фазового сдвига имеет то преимущество перед обычным регулированием (путем изменения частоты питания), что наиболее точно соответствует требованиям следящих систем, в которых требуется управлять непосредственно углом поворота, а не частотой вращения (управление частотой вращения также бывает необходимо в переходных режимах, но имеет подчиненный характер).Предлагаемый способ обеспечиваетпрямое управление именно углом поворота, минуя операции задания частоты вращения изменения частоты, измерения углового положения и выдачи команды на стопорение двигателя (перевод его в режим синхронного стояния). Закон изменения фазового сдвига во времени может быть самым разнообразным в зависимости от заданного угла поворота, требований к динамическим и энергетическим характеристикам в переходных режимах (в том числе и требований относительно скорости отработки, если таковые имеются), Так как частоты питания обеих обмоток всегда одинаковы, то двигатель двойного питания практически всегда находится в режиме синхронного стояния (за исключением кратких моментов перехода в новое положение), что гарантирует достижение точно заданного углового положения.Если система управления электроприводом с двигателем двойного питания, реализующая способ позиционирования, аналоговая, то изменение фазового сдвига необходимо делать столь же малым, как и требуемое приращение угла. Однако точное задание малогоприращения фазы средствами аналоговой техники иногда бывает затруднительно. В этом случае некоторые преимущества имеют двигатели с электро 5"агнитной редукцией частоты вращения, так как для поворота на тот же угол им требуется задавать в К раз большее приращение фазы (К, в таких ДДП достигает нескольких десятков). 1 О В случае систем с дискретным широтно-импульсным формированием напряжения по закону синуса задают приращение фазового сдвига кратным периоду тактовых импульсов широтно-импульсного модулятора. Это обеспечипает гарантированную точность воспроизведения шага, свойственную дискретным системам, причем величина элементарного шага может быть получена 20 весьма малой.Например, для двигателя электромагнитной редукцией частоты вращения при коэффициенте электрической рецукции К = 42 и числе тактовых имепульсов и = 24 на периоде питающих напряжений элементарный шаг360дч == 0,35.с К иОсобенность способа позиционирования заключается также в том, что величина углового перемещения не зазисит от частот питания двигателя, а определяется только приращением фазового сдвига. Это можно показать следующим образом. Изменение фазового35 сдвига фактически означает разовое изменение периода напряжения и может, быть выражено как в долях периода (т.е., в фазовых единицах), так и во временных единицахОбозначим такое изменение, периода во временных единицах через дТ, Тогда скорость ротора в соответствии с (1) будет 2 1 1 2,1 45,И) = - ( --- ) =;,-(- - КТ, Т К Т1-- ) (4)Т+ дТгде Т - период напряжения питания дозадания приращения по фазе,50Т - период напряжения возбуждения;Т - период напряжения управления.Перемещение ротора двигателя в новое угловое положение произойдет с 55 частотой вращения, определяемой выражением (4), за время Т + дТ, так как на следующем периоде частоты вновьбудут равными, и ротор остановПоэтому приращение угла равно:Тд 129д =ы (г)дт =(Р Ко ится. 1 Т о11)Т+г 1 21 1 ) с 1 Т = (-с Т+ лТ К ТР 2 Т+Т ( - 1) з К Т 2 й гТЛ 4К ТИз выражения (5) следует, что приращение угла поворота пропорционально доле периода, т.е. именно приращению фазы. Это обеспечивает высокую точность позиционирования даже при колебаниях частоты питающих напряжений и облегчает построение практических систем управления электропривода.Электропривод, реализующий предлагаемый способ, работает следующим образом. При подаче напряжений с инверторов 4 и 5 на обмотки возбуждения и управления ротор двигателя 1 устанавливается в некоторое начальное положение. Так как задание частоты обоих инверторов происходит от одного задающего генератора 6, то частоты их абсолютно одинаковы и двигатель работает в режиме синхронного стояния. Если необходимо повернуть ротор на некоторый угол, то блок задания приращения угла поворота формирует соответствующий сигнал (например, в цифровой системе), блок 8 регулирования фазового сдвига преобразует этот сигнал в сигнал, изменяющий фазовый сдвиг напряжения инвертора 5 (напряжения управления) относительно первоначального состояния (или, что то же, - относительно напряжения возбуждения инвертора 4).Происходит мгновенное, на один период изменение частоты напряжения управления, возникает импульс момента, ускорения и частоты вращения, но с началом следующего периода напряжения управления его частота вновь становится равной частоте напряжения возбуждения и двигатель переходит в режим синхронного стояния. Его ротор тормозится и фиксируется в новом положении. Далее процесс продолжается аналогично.Блок 8 регулирования фазового сдвига выполняется в зависимости от10 отклониться от заданного положения, если сигнал о стопорении двигателя40 придет с некоторым неизбежным запаздыванием.Кроме того, применение предлагаемого способа позволяет создавать точные следящие системы без специальнотого, как регулируется фазовый сдвиг в инверторе 5, В частности, если инвертор 5 выполнен с использованием широтно-импульсной модуляции котоЭ5 рая осуществляется путем сравнения некоторого напряжения постоянного тока с опорным синусоидальным, то можно менять фазу этого опорного синусоидального напряжения с помощью обычных фазосдвигающих устройств,Таким образом, в сравнении с известным предлагаемый способ позиционирования обеспечивает повышенную точность позиционирования, так как регулируется само угловое перемещение ротора и исключаются промежуточные операции задания частоты вращения, частоты питания, измерения углового перемещения и формирования сигнала о стопорении двигателя, а вместе с тем и соответствующие ошибки. Угол поворота согласно предлагаемому способу не зависит от частот питания обмоток (единственным условием являет ся равенство этих частот, которое легко обеспечивается), а лишь от при. ращения фазы, которое в дискретных системах может быть фиксированным.Этим обеспечивается хорошая повторяемость шага двигателя при отработке перемещений. Двигатель двойного питания все время находится в режиме синхронного стояния (кроме хрустких моментов перехода на новый шаг), что гарантирует фиксацию ротора именно в заданном положении, в то время, как при известном способе ротор может го датчика обратной связи по углу,что уменьшает массу и габариты всейустановки.формулаизобретения1. Способ регулирования угловогоположения ротора двигателя двойногопитания с двумя многофазными обмотками, при котором на укаэанные многофазные обмотки подают отдельные питающие переменные напряжения, в началерегулирования изменяют регулируемыйпараметр одного из этих напряженийв соответствии с требуемым углом поворота ротора, а в конце регулирования переводят двигатель двойного питания в режим синхронного стояния,о т л и ч а ю щ и й с я тем, что, сцелью повышения точности, устанавливают частоты питающих переменных напряжения одинаковыми, обеспечивая первоначальный режим синхронного стояния двигателя двойного питания, в начале регулирования в качестве регулируемого параметра одного из питающих переменных напряжений используютфазовый сдвиг в пределах одного электрического периода, величину которого изменяют пропорционально требуемому углу поворота ротора и коэффициенту электрической редукции, а режим синхронного стояния для двигателя двойного питания в конце регулирования обеспечивают, устанавливаячастоты питающих переменных напряжений одинаковыми,2. Способ по п.1, о т л и ч а ю -щ и й с я тем, что при широтно-модулированных питающих напряжениях фазовый сдвиг изменяют дискретно черезфиксированные интервалы, кратные тактовому периоду широтно-импульсноймодуляции.372582 Составитель А.ЖилинТехред М.Дидык Корректор В. Гпрняк Редактор Н. Тупица Заказ 498/54 Тираж 583 Подписное ВШЯПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д, 4/5
СмотретьЗаявка
4085386, 03.07.1986
КРАСНОЯРСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
БРОНОВ СЕРГЕЙ АЛЕКСАНДРОВИЧ, ЗАБУГА ВИКТОР АЛЕКСАНДРОВИЧ, ПАНТЕЛЕЕВ ВАСИЛИЙ ИВАНОВИЧ, СОУСТИН БОРИС ПОРФИРЬЕВИЧ
МПК / Метки
МПК: H02P 7/46
Метки: двигателя, двойного, питания, положения, ротора, углового
Опубликовано: 07.02.1988
Код ссылки
<a href="https://patents.su/6-1372582-sposob-regulirovaniya-uglovogo-polozheniya-rotora-dvigatelya-dvojjnogo-pitaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ регулирования углового положения ротора двигателя двойного питания</a>
Преобразователь угла поворота вала в фазовый сдвиг двух напряжений

Номер патента: 632895
Опубликовано: 15.11.1978
Автор: Артюхов
МПК: G01B 7/30
Метки: вала, двух, напряжений, поворота, сдвиг, угла, фазовый
...датчика угла соединенсо .входами фазоврашателей, выходы которых подключены к вторым входам фазовых дискриминаторов.На фиг. 1 приведена функциональнаясхема предложенного преобразователя; напредставлена на фиг, 2 пунктирной кривой.К погрешностям редукторов 10 и 11, а также фазовращателей 12 и 13 не предъявляется высоких требований, так как основные паразитные составляющие выходного сигнала, обусловленные этими погрешностями, лежат в высокочастотной области и отфильтровываются, Однако нельзя считать, что допускается любое значение погрешности редуктора и фазовращателя, так как в приведенном на фиг. 2 спектре частот не учтены составляющие высших порядков малости. Так, например, не учитывается ввод малости второго порядка...
Устройство для компенсации фазового сдвига синхронизирующего напряжения промышленной частоты

Номер патента: 512540
Опубликовано: 30.04.1976
Автор: Петров
МПК: H02J 13/00
Метки: компенсации, промышленной, сдвига, синхронизирующего, фазового, частоты
...действие нагрузки 5 изображена на фиг. 2,пунктирными линиями, где01 О - падение напряжения в линии электропередач 2, обусловленное проводимостями линии на землю;Ьо - падение напряжения на линии электропередач 2, обусловленное протеканием тока нагрузки 1,.На вторичной стороне трансформатора напряжения 1 наводится напряжение С, (фиг, 2), совпадающее по фазе с напряжением на первичной стороне трансформатора напряжения и меньшее по абсолютной величине в число раз, равное коэффициенту трансформации К,н. Напряжение У, со вторичной стороны трансформатора напряжения 1 подается на последовательно включенные резистор 3 и индуктивность 4, в результате на конце вторичной обмотки трансформатора тока 1 появляется напряжение б равное падению...
Способ управления электродвигателем двойного питания

Номер патента: 1073870
Опубликовано: 15.02.1984
Авторы: Гуляев, Сонин, Тургенев
МПК: H02P 5/40
Метки: двойного, питания, электродвигателем
...элемент 13, функциональный блок 14,блок произведения 15, блок коммутации положительной обратной связипо току статора 16, регулятор амплитуды напряжения ротора 17, задатчик амплитуды напряжения статора 1 8, задатчик фиксированной амплитуды напряжения ротора 19, задатчик фиксированной. частоты 20 напряжения ротора.В процессе осуществления способа управления двигателем двойногопитанйя устройство; функционируетследующим образом,На силовые входы преобразователей частоты статора 2, ротора 3 иблоков управления подают напряже-,ния питания. От задатчика фиксиро:ванной частоты ротора 20 задающего постоянную частоту напряженияпитания ротора порядка 3-5 Гц) через блок управления инверторнымзвеном 11 преобразователя частотыротора 3 подают управлякщие...
Устройство для питания двигателя блока вращающихся головок видеомагнитофона

Номер патента: 391598
Опубликовано: 01.01.1973
Авторы: Вител, Леус, Михейкина
МПК: G11B 21/02
Метки: блока, видеомагнитофона, вращающихся, головок, двигателя, питания
...половине периода следования импульсов учетверенной строчной частоты (т. е. 8 лксек, с частотой 12500 гц), поступают на схему сборки, На другой вход этой схемы поступают короткие дифференцированные импульсы с,выхода умножителя частоты, Схема сборки выполняет логическую операцию ИЛИ и на ее выходе будет сумма входных импульсов, число которых за одну секунду равно= 62500+ 125000 = 75000.Импульсы частотой 75000 гц с выхода схемы сборки поступают на пересчетное устройство 5 с коэффициентом пересчета, равным 25. Импульсы выхода делителя частотой следования 3000 гц (75000 гц; 25=3000 гц) поступают на,вход импульсного расщепителя фаз (с коэффициентом деления, равным 6), на трех выходах которого формируются симметричные391598 Составитель С,...
Преобразователь угла поворота вала в фазовый сдвиг

Номер патента: 855396
Опубликовано: 15.08.1981
Автор: Артюхов
МПК: G01D 5/243
Метки: вала, поворота, сдвиг, угла, фазовый
...ключа 12 подключен к компенсационному фазоврацателю 13, а выход через фильтр нижних частот 14 - к исполнительному устройству (например, двигателю)компенсационного фазовращателя 13, С выхода компенсационного фазоврашателя 13снимается цифровой код, эквивалентный углу поворота ротора 1 многополюсного датчика.Преобразователь работает следующим образом.При питании обмотки 2 ротора 1 двух,фазным напряжением от источника 8 питания с секций 4 - 7 выходной обмотки снимаются выходные напряжения, фаза которых изменяется пропорционально углу поворота ротора 1 с электрической редукциейр, где р - число пар полюсов многополюсного датчика, Если во время нарезки, например, шлицов статора допущена несоосность центра заготовки с осью...
Предыдущий патент: Частотно-управляемый электропривод
Следующий патент: Многодвигательный электропривод механизма поворота экскаватора
Случайный патент: Устройство для дистанционного управления электрическим аппаратом