Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
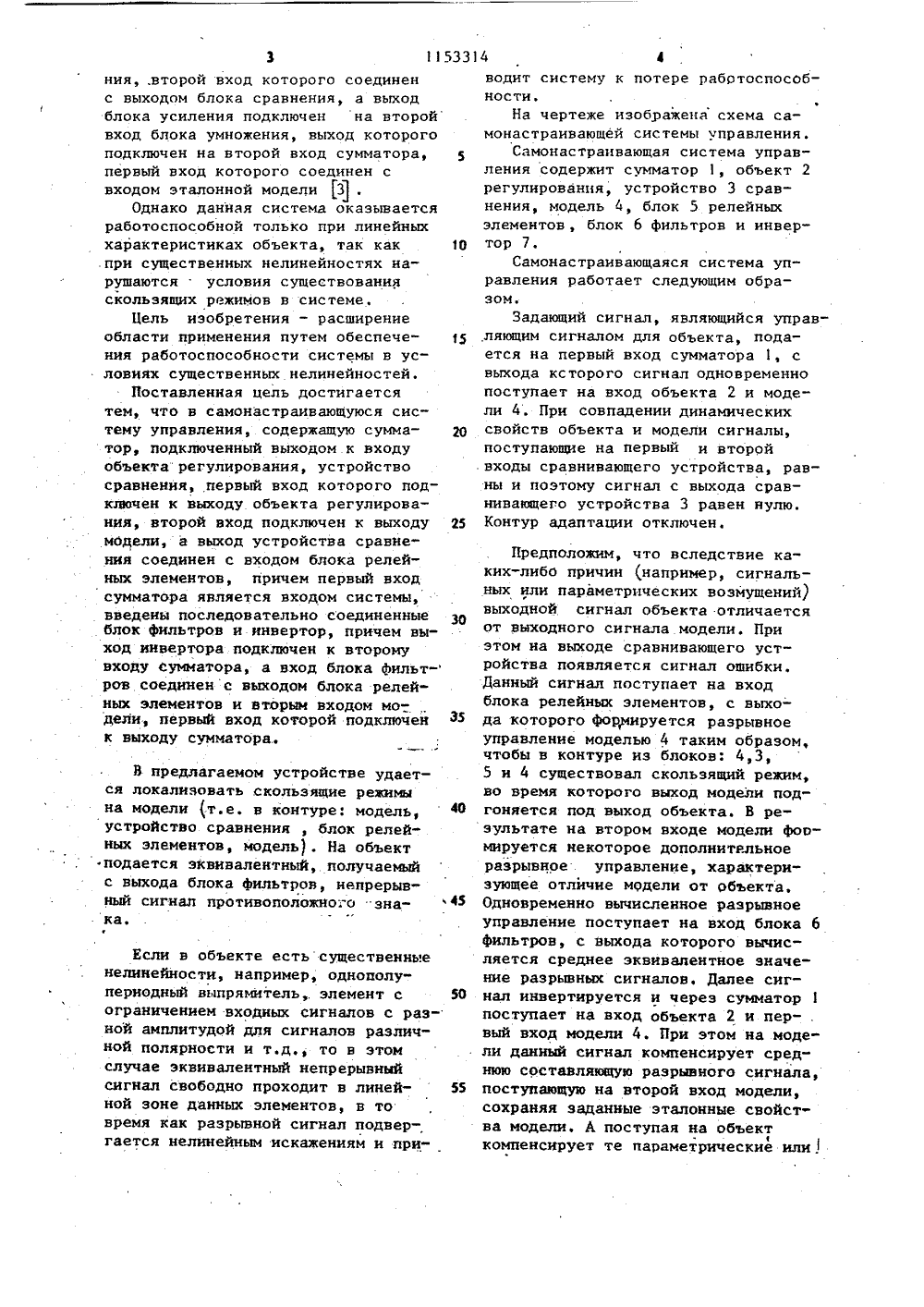
(9 , 4(5 С 05 В 13/02 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР10 делАм изОБРетений и ОтнРытий ОПИСАНИЕ ИЗОБРЕТЕНК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Мййэ гатти:,к входу объектаство сравнения,подключен к вывания, второйду модели, а выния соединен сэлементов,(21) 365006/24-24(71) Ленинградский ордена Ленина электротехнический институт им. В,И.Ульянова /Ленина/ (53) 62-50 (088,8)(56) 1. Куэовков Н.Т.Модальное управление и наблюдающие устройства; М "Машиностроение". 1976., рис.62. Тоцп 8 К.1" 0 еа 8 п оТ Чаг 1 аЬ 1 е Бггцсгцге Го 11 одпр Сопгго 1 Бувгеш 1 ЕЕЕ Тгапвасг 1 оп оп Ацгопагс, 1978, Т. 23, У 6, с. 1079-1085.3. Авторское свидетельство СССР В 935875, кл, С 05 В 13/02, 1980 (прототип).(54)(57) САМОНАСТРАИВА 1 ОЩАЯ МА УПРАВЛЕНИЯ, содержащая подключенныи выходомрегулирования, устройпервый вход которогоходу объекта регулировход подключен к .выхоход устройства сравневходом блока релейныхпричем первый вход сумется входом системы,атора являотл а ю я тем, что, с цель области йрименения ния работоспособност овиях существенных на расширен еспеч мы в услностей,инеив нее введены последов ненные блок фильтров и причем выход инвертора второму входу суммато ка фильтров соединен с а релейных элементов и ом модели, первый вход лючен к выходу суммато тель- ин 0 подно со вертор, ключен вход бл дом бло а ыхо в СЯ СИСТЕ- сумматор,м в оторой подИзобретение относится к автоматическому управлению и может быть нс пользовано для управления объектами, в которых в процессе функционирования имеют место параметрические и сигнальные возмущения, например в роботостроении в системах автоматического управления приводами рабочих органов манипуляционных роботов, в. станкостроении в системах автомати ческого управлейия нриводамн главного движения металлорежущнх станков, в металлургии в. системах автоматического управления приводами прокатных станов, 15Известна самонастраиваощая сйстама управления, содержащая последо-. вательно соединенные настраиваемый регулятор и объект, выход которого соединен с входом регулятора, а также устройство идентификации .пе.ременных параметров объекта, выходы которых воздействуют на .настраиваеыые входы регулятора и .Однако данная. самонастраивающая д система обеспечивает стабилизацию динамических свойств при управлении объектом с нестационарными параметрами только при отсутствии неизмеряемых внешних возмущений адцитив" Зо ного характера, поскольку используе мые в ней устройства идентификации рассчитаны только иа объекты, не подверженные неизмеряеиым внешним возмущениям аддитивного характера.35.. Известна система управления пе" ременной структуры с эталонной моделью, содержащая последовательно соединенные сумматор н объект регулирования, выход которого под40 ключен к первому входу устройства сравнения, к второму входу которого подключен выход эталонной модели, а выход соединен с входом первого релейного элемента и с входом бло ф ка вычисления гиперплоскости скольжения, причем выход первого релейного элемента подключен на первый вход первого умножителя, выход блока вычисления гиперплоскоети сколь- О жения соединен с входом второго релейного элемента, выход которого подключен к первому входу второго блока умножения. При этом система дополнительно снабжена третьим блоком умножения, третьим и четвертым релейным элементом и тремя переключающими блоками: блоком переключения входного сигнала, блоком переключения .сигнала ошибки и блокомпереключения выходного сигнала, причем их выходы включены.на соответствуюшие входы сумматора, а входы -соответственно . к входу системы,к выходу устройства сравнения и выходу объекта регулирования, причемсигнал на переключение входногосигнала поступает с выхода третьегоблока умножения, на первый и второйвходы которого поступают сигналыс выходоьу второго н третьего блокареле, соответственно, причем входтретьего блока реле подключен к входу системы, сигнал на переключениеошибки рассогласования с выходаустройства.сравнения поступает свыхода второго блока умножения, напервый .и второй входы которого поступают сигналы с выходов второго нчетвертого бдоков реле . соответственно,. причем вход первого блокареле подключен к выходу объекта регулирования 2,Однако система управления переменной структуры с эталонной модельюоказывается неработоспособной при наличии изменяющихся внешних возмущений аддитивного характера, действующих на объект, и при существенно нелинейных характеристиках объекта,так как она принципиально рассчитана лишь на работу при отсутствиивнешних возмущений с линейным объектом,Наиболее близкой к предлагаемому является, самонастраивающаяся система управления, содержащая последовательна соединенные сумматор и объект регулирования, выход которого подключен к первому входу устройства сравнения, к второму входу которого подключен выход эталонной модели, а выход соединен с входом первого релейного элемента и с входом блока вычисления гиперплоскости скольжения, причем вход первого релейного элемента подключен на первый вход первого умножителя, выход блока вычисления гиперплоскости скольжения соединен с входом второго релейного элемента, выкод которого подключен к первому входу второго блока умножения, причем первый вход сумматора является входом системы, блок усиления, вход которого соединен с выходом первого блока умножения, .второй вход которого соединен с выходом блока сравнения, а выход блока усиления подключен на второй вход блока умножения, выход которого подключен на второй вход сумматора, первый вход которого соединен с входом эталонной модели 31 .Однако данная система оказывается работоспособной только при линейных характеристиках объекта, так как 10 при существенных нелинейностях нарушаются условия существования скользящих режимов в системе.Цель изобретения - расширение области применения путем обеспече ния работоспособности системы в условиях существенных нелинейностей.Поставленная цель достигается тем, что в самонастраивающуюся систему управления, содержащую сумма тор, подключенный выходом.к входу объекта регулирования, устройство сравнения, первый вход которого подключен к выходу объекта регулирования, второй вход подключен к выходу 25 мддели, а выход устройства сравнения соединен с входом блока релейных элементов, причем первый вход сумматора является входом системы, введены последовательно соединенные блок Фильтров и инвертор, причем выход инвертора подключен к второму входу сумматора, а вход блока фильт- ров соединен с выходом блока репейных элементов и вторым входом мо-дели, первый вход которой подключен к выходу сумматора. В предлагаемом устройстве удается локализовать скользящие режимы на модели (т.е. в контуре; модель, устройство сравнения , блок релейнык элементов, модель) . На объект подается эквивалентный,.получаемый с выхода блока фильтров, непрерывный сигнал противоположного "знака.УЕсли в объекте есть существенные нелинейности, например, однополуериодный выпрямитель,. элемент с 50 ограничением входных сигналов с разной амплитудой для сигналов различной полярности и т.д., то в этом случае эквивалентный непрерывный сигнал свободно проходит в линей ной зоне данных элементов, в то время как разрывной сигнал подвергается нелинейным искажениям и приводит систему к потере работоспособностиНа чертеже изображена схема самонастраивающей системы управления.Самонастраивающая система управления содержит сумматор 1, объект 2регулирования, устройство 3 сравнения, модель 4, блок 5 релейныхэлементов, блок 6 фильтров и инвертор 7,Самонастраивающаяся система управления работает следующим образом.Задающий сигнал, являющийся управляющим сигналом для объекта, подается на первый вход сумматора 1, свыхода ксторого сигнал одновременнопоступает на вход объекта 2 и модели 4. При совпадении динамическихсвойств объекта и модели сигналы,поступающие на первый и второйвходы сравнивающего устройства, равны и поэтому сигнал с выхода сравнивающего устройства 3 равен нулю.Контур адаптации отключен.Предположим, что вследствие каких-либо причин (например, сигнальных или параметрических возмущений) выходной сигнал объекта отличается от выходного сигнала модели. При этом на выходе сравнивающего устройства появляется сигнал ошибки. Данный сигнал поступает на вход блока релейных элементов, с выхода которого формируется разрывное управление моделью 4 таким образом, чтобы в контуре из блоков: 4,3, 5 и 4 существовал скользящий режим, во время которого выход модели подгоняется под выход объекта. В результате на втором входе модели формируется некоторое дополнительное разрывное управление, характеризующее отличие модели от объекта, Одновременно вычисленное разрывное управление поступает на вход блока 6 фильтров, с выхода которого вычисляется среднее эквивалентное значение разрывных сигналов. Далее сигнал инвертируется и через сумматорпоступает на вход объекта 2 и пер- . вый вход модели 4. При этом на модели данный сигнал компенсирует среднюю составляющую разрывного сигнала, поступающую на второй вход модели, сохраняя заданные эталонные свойства модели. А поступая на объекткомпенсирует те параметрические или1153314 та от модели. Составитель П.КудрявцевТехред Л.Микеш Редактор Н.Воловик Корректор Е.Сирохман,Заказ 2504/39 Тираж 863 ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д,4/5Подписное Филиал ППП "Патент", г.ужгород, ул,Проектная, 4 сигнальные возмущения, которыевызывают отклонение выхода объек" Использование дополнительных блоков (блока фильтров и инвертора) и включение указанным способом выгодно отключает предлагаемое устройство от известного, так как применение предложенного изобретения в составе О автоматических систем расширяет область использования самонастраивающихся систем, использующих в своих алгоритмах скользящие режимы. Работоспособность предлагаемого регулятора подтверждается исследованиями в промышленных условиях на электроприводах . непрерывного прокатного стана.Технико-экономический эффект от внедрения прилагаемой самонастраивающейся системы управления обусловлен улучшением динамических свойств автоматических систем . Кроме того, предлагаемое устройство может быть, например рассчитано на работу в системах регулирования электропривода прокатных клетей.
СмотретьЗаявка
3657006, 27.10.1983
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, БУЛАВИН ВЛАДИМИР АЛЕКСАНДРОВИЧ, ЮНГЕР ИГОРЬ БОРИСОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 30.04.1985
Код ссылки
<a href="https://patents.su/4-1153314-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство для прогнозирования надежности

Номер патента: 942045
Опубликовано: 07.07.1982
Авторы: Бурба, Дедков, Лякин, Рублев
МПК: G06F 17/00
Метки: надежности, прогнозирования
...в виде закона распределения еосопротивляемости, а известны толькограницы ее изменения. В этом случаераспределение сопротивляемости аппроксимируется равномерным законом.Тогда функция распределения 45Гл 1(ш) для каждого интервала коррес о 1ляций может быть определена по Формуле 30 1где с и Й - соответственно нижняя иверхняя границы измеренияслучайной сопротивляемости. 55.Цель изобретения - расширение его функциональных возможностей за счет оценки функции распределения вероят 3 94204 ленного последовательнос т ью одинаково распределенных некоррелированных наибольших (для каждого из интервалов корреляции) случайных величин, гарантированную функцию надежности можно выразить в виде последовательности случайных величин со (и) -...
Устройство для адаптивной цифровой фильтрации

Номер патента: 955513
Опубликовано: 30.08.1982
Автор: Попов
МПК: H03H 21/00
Метки: адаптивной, фильтрации, цифровой
...сигнал с блока 4 формирования эталонного сигнала, Выход .сумматора 9 соединен с первым входом(2 п+1)-го умножителя 5. Сигналы свыходов квадраторов б поступают навход второго накапливающего сумматора 8. Сигнал с выхода второгонакапливающего сумматора 8 поступает через усилитель 10 на первыйвход (2 п+2)-го умножителя, на второй вход которого поступает сигнал(2 п+2)-го умножителя 5 соединенвторым входом (2 п+1)-го умножителя5, Выход (2 п+1)-го умножителя 5соединен с вторыми входами вторыхи умножителей 5. Сигналы с выходови умножителей 5, которые соединеныс и входами первого блока 7 памяти, представляют собой уточняющие величины весовых коэффициентов. Сигнал с выхода одного из умножителей 5 поступает на второй вход блока 3 управления,...
Система оптимального управления с моделью объектами второго порядка

Номер патента: 888071
Опубликовано: 07.12.1981
Авторы: Синеглазов, Чумаченко
МПК: G05B 13/04
Метки: второго, моделью, объектами, оптимального, порядка
...- ОП 1+Оьщр Оп 1 где ОпХ- максимальноезначейие уйравляюших воздействий какфункции фазовых координат объекта уп 71 Ьравления )(1 И), Х(+ ). При этом система реализует нелинейный закон управления, определенный на фаэовой плоскости уравнением линии переключения. Поскольку кусочно-линейная или кусочно- нелинейная аппроксимация функции переключения сопряжены со значительными погрешностями, то для реализации закона управления могут быть использованы рекуррентные соотношенияХ"=В(Ь)гд (Ь)О. Х", +С 1(Ь) Х, ЭО)-1 ","-С,(Ь)фдад)О В,( )Х 1.Х,СО на основании которых можно реализовать уравнение движения объекта. Коэффициен- ты А 1(Ь), В,(Ь), С, (Ь), А (Ь), В(Ь), С(Д) являются линейными функциями коэффициентов объекта, шага прогнозирования Ь....
Устройство для регистрации времени входа и выхода

Номер патента: 898478
Опубликовано: 15.01.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...17 отображения, блок 18 печати.Блок б управления, блок 8 регистрации, программный блок 12 реализованы на базе микропроцессоров иу 5 перепрограммируемых постоянных запоминающих устройств.При наличии заявки с любого блока 2 считывания, коммутатор 3 последовательно опрашивает и отыскивает блок считывания, в котором содержится код жетона-пропуска. Датчики 1 направления дополняют этот код кодом направления движения (приход на предприятие или уход иэ предприятия). Полученный код через коммута/ тор 3 поступает в приемный регистр 4 и через него в блок 5 контроля кода. Код жетона-пропуска определяет адреса ячеек программного блока 12 и блока 8 регистрации. Если код жетона-пропуска считан верно, то блок б управления считывает код...
Регулятор с моделью объекта

Номер патента: 1080118
Опубликовано: 15.03.1984
Авторы: Авдеев, Басалаев, Жданов, Мышляев, Сарапулов, Фролов, Хамидулин
МПК: G05B 13/02
Метки: моделью, объекта, регулятор
...невысокой.Цель изобретения - повышение точности регулирования.Поставленная цель достигается тем, что и регулятор введены сумматор, последовательно включенные второй регулятор, модель объекта с запаздыванием и четвертый блок сравнения,. причем выход первого блока сравнения подключен к входу второго регулятора и второму входу четвертого блока сравнения, выход которого соединен с вторым входом второго блока сравнения, первый вход сумматора соединен с выходом первого регулятора, второй вход сумматора - с выходом второго регулятора.Введенный второй регулятор пред- назначен для выработки корректирующего воздействия дО для подавления отклонений между у и у. ЭФфекты йО, полученные с помощью модели объекта с запаздыванием, вычитаются в четвертом...
Предыдущий патент: Устройство для компенсации изменения коэффициента передачи газоанализатора
Следующий патент: Регулятор уровня в бьефах гидротехнических сооружений
Случайный патент: Трехфазный самовозбуждающийся инвертор