Устройство для определения параметров движения изображения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
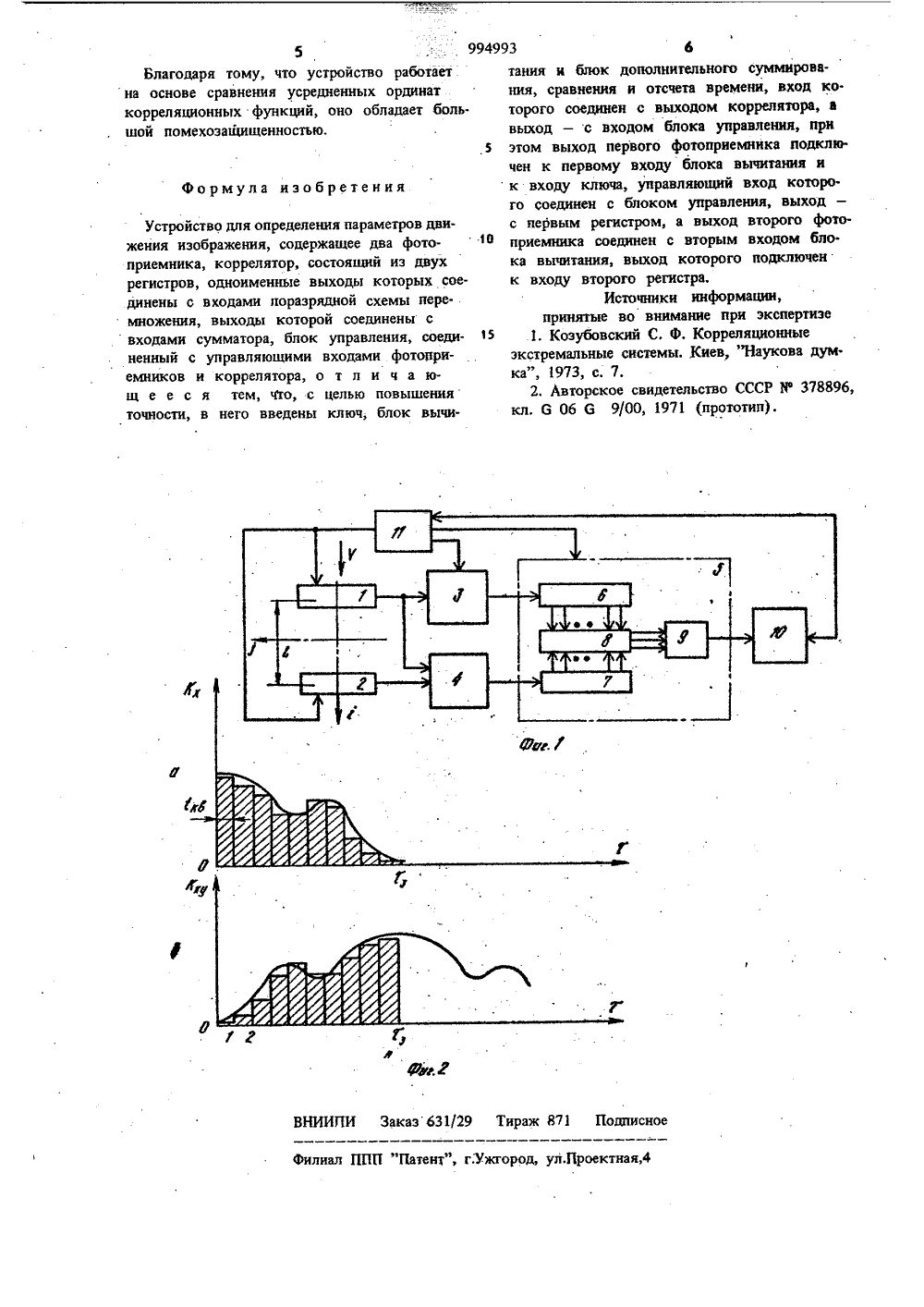
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз СоветскмкСоциалмстическнкРеспублик и 994993 Жъ(53) УДК 621,317, ,39:531.767 (088.8) Опубликовано 07 02 83 Бюллетень )в 5Дата опубликования описания 07.02.83 ло делам изобретений н открытий(72) Авторы изобретения И, И, Волков, В. К, Семенычев, В В, Сбродов и В,Куйбышевский ордена Трудового Красного Знамполитехнический институт им. В. В, Куйбышева(54) УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОИЗОБРАЖЕНИЯ ЕН борострое бесконтактения иного измерения параметров движ дв жушихся сред и поверхностей.Известно устройство для определения ско рости движения изображения, основанное на5 определении временногосдвига (транспортного запаздывания) между двумя сигналами путем вычисления взаимной корреляционной функции этих сигналов 1.1 О Известно также устройство для определения параметров движения изображения, содержащее два фотоприемника, коррелятор,состоящий из двух регистров, одноименныевыходы которых соединены с входами поразрядной схемы перемножения, выходы которой соединены с входами сумматора, иблока управления, управляющие выходыторого подключены к коррелятору иприемникам 2) .Однако указанные устройствакую точность определения ларамния изображения в том случае,5 ко- фотоимеют низетров движеесли функция Изобретение относится к и и может быть использовано длвзаимной корреляции двух сигналов имеетколебательный характер и локальные экстремумы, кроме главного, так как устройствоможет выйти вместо главного экстремумана локальные (даже на минимум, а немаксимум),Кроме того, при пологой форме взаимокорреляционной функции поиск точки экстремума затруднен, следовательно, время транспортного запаздывания будет определятьсясо знап 1 тельной ошибкой.Целью изобретения является повышениеточности измерения параметров движенияизображения,Цель достигается тем, что в устройствовведены блок дополнительного суммирования, сравнения и отсчета времени, блок вычитания и ключ, вход которого соединен свыходом первого фотоприемника и с пер.вым входом блока вычитания, второй входкоторого подключен к выходу второго фотоприемника, а выход блока вычитаниясоединен с входом второго регистра, при2 О Устройство работает следующим образом.35Изображение сканируетсядвумя фотоприемниками (например, двумя линейными приемниками с зарядовой связью), отстоящими друг от друга на кадровое расстояние 1На нулевом такте работы устройства сигнал с выхода первого фотоприемника 1 через замкнутый ключ 3 записывается в регистр 6, где он хранится в течение всего цикла измерения (кадрового периода), Зтот сигнал представляет собой последовательность45 импульсов, амплитуда которых пропорциональна освещенности в ячейке строки. В блокеГ 10 дополнительного суммирования, сравнения и отсчета времени начинается отсчет времени, Одновременно указанный сигнал поступает на первый вход блока 4 вычитания. На второй вход блока 4 вычитания поступает сиг. нал с второго фотоприемника 2. В блоке 4 формируется разность этих сигналов, которая записывается в регистр 7 коррелятора 5,В поразрядной схеме 8 перемножения значения одноименных .разрядов регистров б и 7 непрерывно перемножаются, а результаты перемножения суммируют в сумматоре 9,этом выход ключа соединен с входом первого регистра, а выход сумматора - с входом блока дополнительного суммирования,сравнения и отсчета времени, блок управления подключен к управляющему входу ключаи выходу блока дополнительного суммирования, сравнения и отсчета времени.На фиг, 1 изображена схема устройства;на фиг. 2 а, б - возможный вид автокорреляционной функции сигнала с первого фо Отоприемника и взаимокорреляционной функции сигналов первого и второго фотоприемников соответственно,Устройство содержит два фотоприемника 1и 2, расположенные на расстоянии 1. друг 15от друга, лри этом выход фотоприемника 1соединен с входой ключа 3 и с первым входом блока 4 вычитания, второй вход кото-рого (инвертирующий) соединен с выходомфотоприемника 2, а выходы ключа 3 иблока 4 вычитания соединены с входамикоррелятора 5, который состоит из регистров 6 и 7, поразрядной схемы 8 перемножения, выходы которой подключены к сумматору 9, выход которого соединен с входами блока,10 дополнительного суммирования, сравнения и отсчета времени, выходкоторого является выходом устройства, Блок11 управления подключен к фотоприемникам 1 и 2, управляющему входу ключа 3,коррелятору 5, выходу блока 10 дополниЭтельного суммирования, сравнения и отсчетавремени. Таким образом, на нулевом такте работы устройства вычисляется путем усреднения по множеству разность оценок ординат автои взаимокорреляционных функций сигналов фотоприемников при нулевом аргументе. Вычисленная разность заносится в блок 10, где она сравнивается с нулем. Так как она не равна нулю (фиг. 2 а, 2 б), то на первом и последующих тактах работы устройства в регистр 7 поступает разность дВух преобразованных в электрическую форму видеосигналов с фотоприемников 1 и 2.Каждое последующее значение разности выталкивает из регистра 7 предыдущее значение и, после поразрядного, перемножения значений регистров 6 (ключ 3 после нулевого такта работы устройства разомкнут . и в регистре 6 хранится все время реализация нулевого такта) и 7 и усреднения по множеству, в блоке 9 указанные разности дополнительно суммируются в блоке 10, начиная с первого такта, и сравниваются с нулем.Таким образом сравниваются, площади заштрихованных фигур 1 фиг, 2 а, 2 б) при их ступенчатой аппроксимации. Очевидно, они будут равны лишь при и ЬВ=7,где и - число тактов, при котором результат сравнения в блоке 10 станетравным нулю;хВ - период квантования;г-- транспортное запаздывание изобраЧжения на расстоянии 1 при дви.жении его со скоростью Ч,Таким образом, при и= ь 5 /х будетвыполнено условие равенства соответствующих площадей, отсчет времени прекращает.ся, на выходе блока 10 появляется сигнал,пропорциональный времени транспортного запаздывания изображения. На блок 11 подается сигнал окончания цикла измерения. Таким образом при отсутствии сноса изображения, т.е, если направление вектора движе.ния изображения совпадает с осью(фиг. 1), зная с 3 , можно определитьскорость движения изображения по формулеМ = , Затем работа устройства повторяется с нулевого такта работы.При наличии угла сноса изображения с помощью предлагаемого устройства можно определить проекцию вектора скорости на ось 1, Чтобы определить проекцию вектора скорос.ти на ось 1 можно использовать аналогичное устройство, расположив фотоприемники перпен.дикулярно оси 1, Зная составляющие вектора скорости,.можно определить модуль вектора скорости и угол сноса изображения,5 9949Благодаря тому, что устройство работаетна основе сравнения усредненных ординаткорреляционных функций, оно обладает боль.щой помехозащищенностью.3 93 Формула изобретения Устройство для определения параметров движения изображения, содержащее два фото-В приемника, коррелятор, состоящий из двух регистров, одноименные выходы которых сое динены с входами поразрядной схемы перемножения, выходы которой соединены с входами сумматора, блок управления, соеди. 15 пенный с управляющими входами фотоприемников и коррелятора, о т л и ч а ющ е е с я тем, что, с целью повышения точности, в него введены ключ, блок вычи 6тания и блок дополнительного суммирования, сравнения и отсчета времени, вход которого соединен с выходом коррелятора, авыход - с входом блока управления, приэтом выход первого фотоприемника подключен к первому входу блока вычитания ик входу ключа, управляюший вход которого соединен с блоком управления, выход -с первым регистром, а выход второго фотоприемника соединен с вторым входом бло.ка вычитания, выход которого подключенк входу второго регистра,Источники информации,принятые во внимание при экспертизе1. Коэубовский С. Ф, Корреляционныеэкстремальные системы. Киев, "Наукова думка, 1973, с. 7.2, Авторское свидетельство СССР У 378896,кл, 6 06 6 9/00, 1971 (прототип).
СмотретьЗаявка
3347376, 15.10.1981
КУЙБЫШЕВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
ВОЛКОВ ИГОРЬ ИВАНОВИЧ, СЕМЕНЫЧЕВ ВАЛЕРИЙ КОНСТАНТИНОВИЧ, СБРОДОВ ВЛАДИМИР ВАСИЛЬЕВИЧ, СВИРИДОВ ВЯЧЕСЛАВ ПАВЛОВИЧ
МПК / Метки
МПК: G01P 3/68
Метки: движения, изображения, параметров
Опубликовано: 07.02.1983
Код ссылки
<a href="https://patents.su/3-994993-ustrojjstvo-dlya-opredeleniya-parametrov-dvizheniya-izobrazheniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для определения параметров движения изображения</a>
Устройство для вычитания и суммирования последовательностей импульсов с импульсами опорной частоты

Номер патента: 746571
Опубликовано: 05.07.1980
МПК: G06G 7/14
Метки: вычитания, импульсами, импульсов, опорной, последовательностей, суммирования, частоты
...выделения периода, Второй выход генератора 3 соединен с первым входом блока 6 вычитания, подключенноговторым входом к выходу блока 5 выделения периода, Входы элемента 1 И, соединенного выходом со вторым входом блока 4 синхронизации, подключень ко входу8 импульсов суммируемой частоты и входу 9 управления суммированием, Входыэлемента 2 И подключенного выходом ковторому входу блока 5 выделения периода,соединены с входом 10 импульсов вычи 657 1 4 таемой частоты и входом 11 управлениявычитанием,Устройство работает следующим образом,Генератор 3 опорной частоты вырабатывает на своих выходах последовательности импульсов одинаковой частоты, сдвинутые друг относительно друга на половину периода. Импульсы суммируемойчастоты со входа 8 при наличии...
Устройство для автоматического контроля больших интегральных схем

Номер патента: 1027735
Опубликовано: 07.07.1983
Автор: Панов
МПК: G01R 31/303, G06F 11/14
Метки: больших, интегральных, схем
...конца испытаний, регистр 2 для восстановления начального адреса повторяющегося циклаиспытаний., регистр 3 служит буферной памятью для выравнивания задержек выходной тестовой комбинации,регистры 1-7 предназначены для хранения текущих адресов соответству"ющих памятейСчетчик 8 предназначен для уп.равления через регистры 1-7 адресами соответствующих памятей 2 Ь,счетчик 9 для определения числа.по"вторяющихся тестовых комбинаций,счетчик 10 .для подсчета, числа про"шедших циклов испытаний, счетчик 11для формирования кода управления дешифратором 36.Схема 12 сравнения служит для.сравнения конечного адреса, записанного в регистре 1, с текущим значением адреса в счетчике 8.Коммутатор 13 предназначен дляпропускания адреса начала цикла врегистр 2,...
Устройство для параллельного суммирования двух чисел
Номер патента: 523452
Опубликовано: 30.07.1976
Авторы: Колосов, Колосова, Мелехин, Талдыкин
МПК: G11C 11/02
Метки: двух, параллельного, суммирования, чисел
...18, 20, блока 26, а также вход 27 элемента И 23 подсоединены к соответствующим выходам блока управления, не показанного на чертеже,Суммирование двух двоичных чисел в предлагаемом устройстве выполняется за пять обращений к МОЗУ по следующему алгоритму:ввод числа а в специально выделенные для выполнения логических операций линейки МОЗУ;ввод числа б в те же линейки с получением выражений вычисление слова переносов Р;+ по формулей,-1: (цс ЧУЮ г Р)1 (1)вычисление 5, по формуле5, =-: а, / 6, ,/ а,6(2)где 5 - предварительная сумма без учетапереносов;вычисление суммы Х; по формуле 5 10 15 20 25 30 35 40 1-ассмотрим работу предлагаемого устройства при образовании слова переносов по формуле (1) в третьем цикле обрящсшгя к накопителю согласно...
Устройство для вычитания десятичных чисел
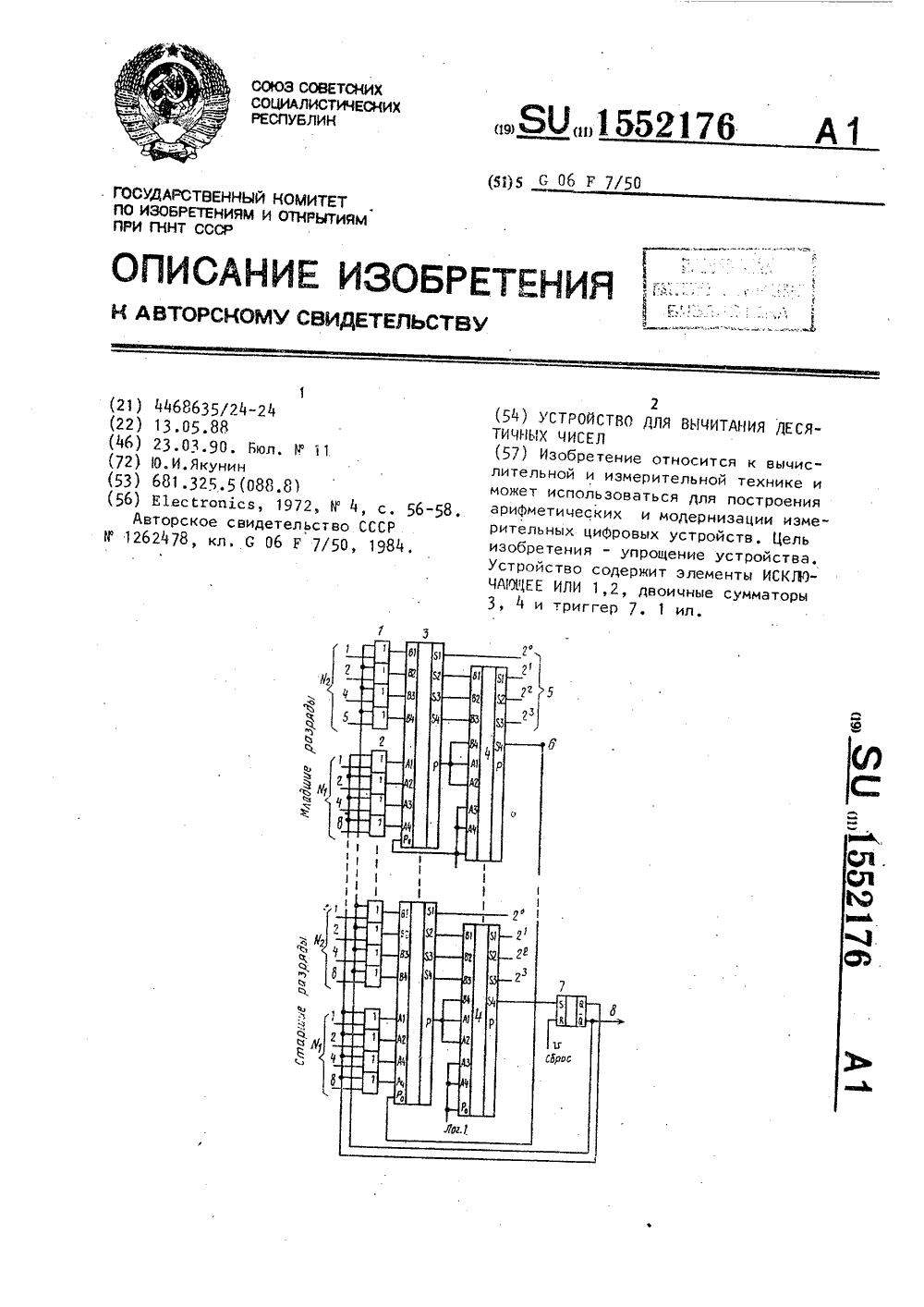
Номер патента: 1552176
Опубликовано: 23.03.1990
Автор: Якунин
МПК: G06F 7/50
Метки: вычитания, десятичных, чисел
...что в зависимостиот сигнала переноса с сумматора 3 наего входах второго слагаемого устанавливается либо число "15", либочисло "12", которое суммируется с первым слагаемым, скорректированнымтакже по старшему разряду, и на выходах трех младших разрядов сумматора4 образуется двоично-десятичный код(2, 2, 2 ), а самый старший разряд84 является сигналом переноса дляпромежуточных вычислений или сигналомформирования знака разности черезтриггер 7.О 1 001Ы Зна (ра нос отр 6) 7) на лючееиггеигнал Б 4 = 0 вклю"торый через элемен"1 инвертирует чис" 3тановится равной0 триггера указыва. В этом случае чает триггер.7. ты ИСКЛОЧАа 1 ЕЕ ло Н и разность "24", а сигнал ( ет знак: "-24". м ев Редактор В,Петраш орректор С.Черни Заказ 3 Тир Подписноеениям...
Устройство для поиска дефектов дискретных блоков

Номер патента: 1714610
Опубликовано: 23.02.1992
МПК: G06F 11/26
Метки: блоков, дефектов, дискретных, поиска
...триггеров 17 и 18 нулевое. При поступлении положительного перепада(из "О." в "1") с выхода коммутатора 3 триггером 17 фиксируется уровень логической единицы, который переключается элементом И 19 при условии наличия сигналов выбора положительного перепада, выбора блока 15 и сигнала синхронизации от блока 6 управления на первый вход элемента ИЛИ 21; При поступлении отрицательного пере 10 15 элемент 23, выбора блока 15 от генератора 1 тестов и сигнала синхронизации от блока 6 управления на второй входэлемента ИЛИ 21,Генератор 1 тестов работает следующим образом,Перед началом работы счетчики 27 и 28 устанавливаются в нулевые состояния сигналом, поступающим на вход пуска генератора 1 тестов. В запоминающих устройствах 24-26 которые могут быть...
Предыдущий патент: Устройство для измерения скорости транспортного средства
Следующий патент: Устройство для определения параметров движения изображения
Случайный патент: Способ переработки фторсодержащих травильных растворов