Устройство для определения параметров движения изображения
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
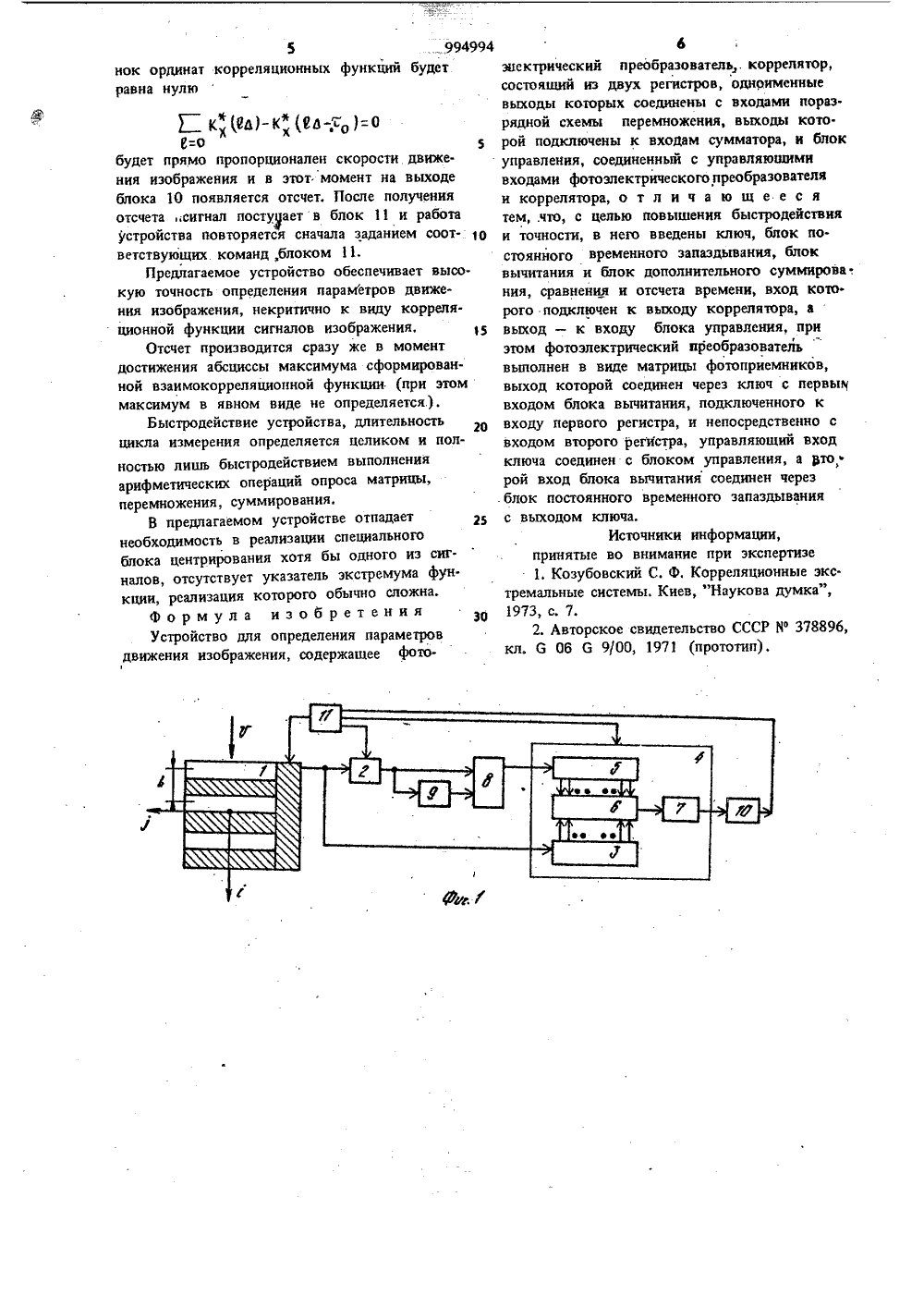
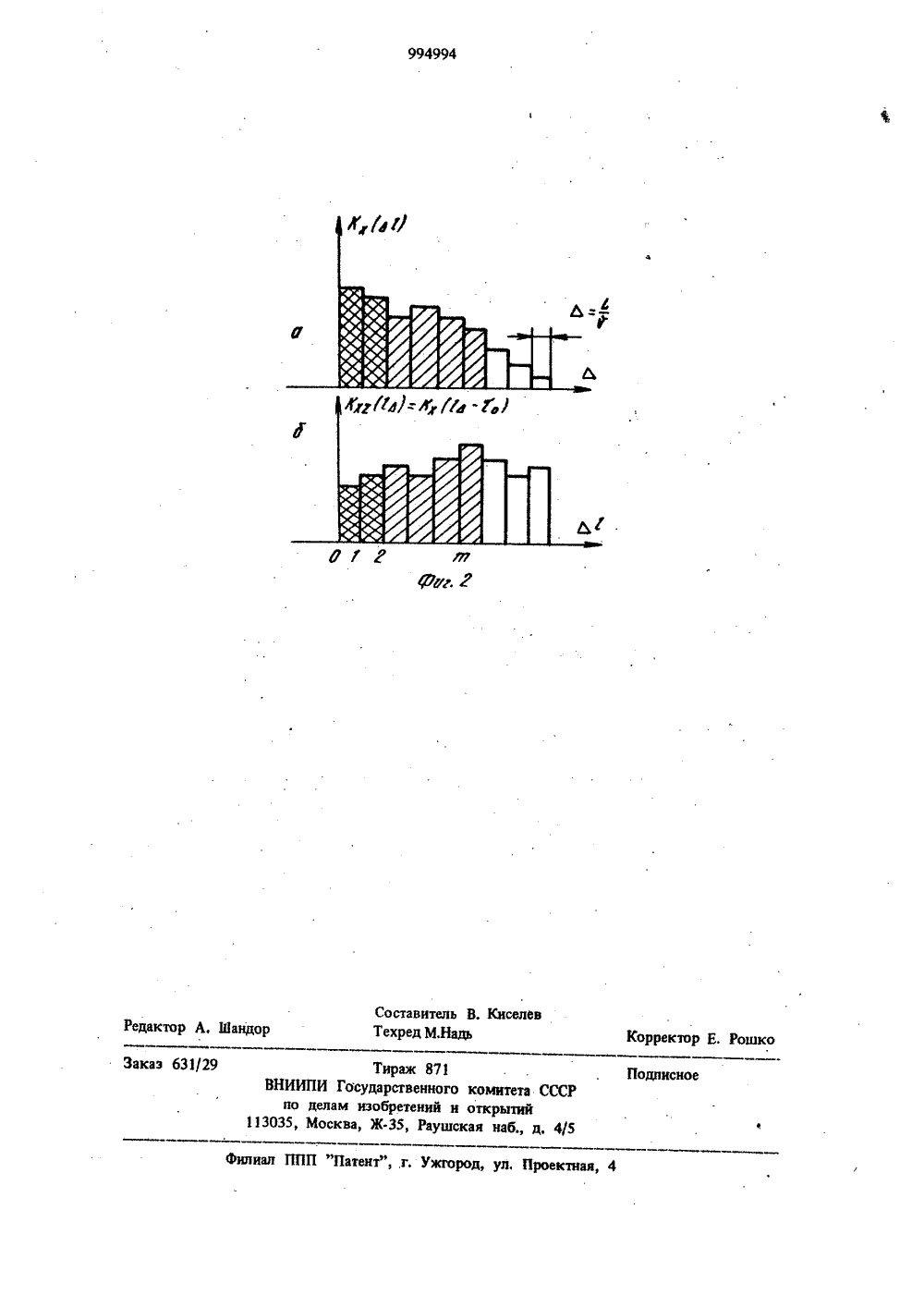
. В. Куйбы ева йбышевский ордена Толитехнический институ СТРОИСТВО ДЛЯ ОПРЕДИЛЕНИ ДВИЖЕНИЯ ИЗОБРАЖЕНИЯ ТРО боростроению ция взаимной корреляции сигналов с фотобесконтактного датчиков имеет колебательный характер, так движущихся как устройство может выйти на локальныймаксимум (или даже локальный минимум).5При пологой форме взаимокорреляционнойфункции поиск экстремума затруднен н также осуществляется с большой погрешностью,Кроме того, для исключения вероятности,выхода на локальный максимум устройстводолжно пройти его с запасом по времени,проверить, что другого максимума нет вблизи,что снижает быстродействие устройства. Изобретени ожет быль тносит пр спользовано змерения параметр вижени стей. ойств сред и поверхноИзвестно устрметров двнженина измерении врзапаздывания) мвычисления корре о для определения парабражения, основанное го сдвига(транспортного . двумя сигналами путем иной функции этих емен ежду л сигналов стро- трав- етмели, ва- фотов ви- вход метровкогда функ Известно также устройство для определения параметров движения изображения, содержащее фотоэлектрический преобразователь,коррелятор, состоящий из двух регистров, одноименные выходы. которых соединены с входами поразрядной схемы премножения, выходыкоторой соединены с входами сумматора, иблок управления, соединенный с управляющими входами фотоэлектрического преобразователя и коррелятора Щ,Однако указанные устройства имеютнизкую точность определения парадвижения изображения в случае,Цель изобРетенин - повышЬиие быдействия и точности измерения временспортного эацаздывания и других парамров движения изображения,Указанная цель достигается тем, чтоустройство введены блок дополнительносуммировании, сравнения и отсчета вреблок вычитания, ключ и блок запаэдьния на постоянную величину времени,электрический преобразователь выполненде матрицы фотоприемников, при этом994 где Е (то) = Х (1 о- Г ),7, - эталонноезапаздывание вносимое блоком 9. Затемключ 2 закрывается, а разность хранится врегистре 5 в течение всего цикла измерения,умножаясь поразрядно в схеме 6 на нулевоми последующих тактах работы на сигнал, поступающий в регистр 3. После перемноженияв схеме 6 результаты суммируются в сумматоре 7, т. е. формируется,на каждом тактеработы разность оценок ординат двух корреляционных функцийи"Е(е ). е(е,ф,(,): е"(е, )- к"(еа ,),35 где М - Оператор усреднения по множеству(реализуемый сумматором 7, 3 = О, 1, 2,й.Указанные разности заносятся в блок 10,суммируются, начиная с первого такта, исравниваются с нулем, т. е. формируется величинаеп)тее (к"(еа)-е(еа-,):) к"(еа)- 8=0мм = + дхравная разности плошадей двух заштрихован.ных на фиг. 2 а и бфигур, (и - переменныйверхний индекс суммирования (для примерана рис 2 т=2)Очевидно, что при любом виде корреляци.онной функции указанные плошади будут рав.ны в единственном случаег епеэ = е,о, или и)Таким образом, номер ге) строки матрицыфотоприемников (номер такта работы устрой. е ства), при котором накопленная разность оце. ключа подключен к выходу матрицы ивходу второго регистра, выход ключа подключен к первому входу блока вычитаниянепосредственно, а к второму - через блокзапаздывания, выход блока вычитания подклю.чен к входу первого регистра, выход коррелятора соединен с входом блока дополни.тельного суммирования, сравнения и отсчетавремени, блок управления подключен к управляющему входу ключа и выходу блокадополнительного суммирования, сравнения иотсчета времени,На фиг. 1 представлена схема устройства;на фиг. 2 - возможный вид автокорреляционной функции К 1(йй ) сигнала первого фо.топриемника (а) и взаимокорреляционнойфункции Кх е (0 й ) сигналов первого ивторого фотоприемников (б) .Устройство содержит матрицу 1 фотоприемников, например строчнокадровую матрицуприбора с зарядовой связью (ПЗС), выходкоторой соединен с входом ключа 2 и вторым регистром 3 коррелятора 4, в которыйвходят также первый регистр 5, поразряднаясхема 6 перемножения, выходы которой подключены к сумматору 7, Выход ключа 2подключен к инвертирующему входу блока 8вычитания непосредственно, а к неинвертирую.щему входу блока 8 вычитания через блок 9постоянного временного запаздывания, Выходсумматора 7 соединен с входом блока 10 дополнительного суммирования, сравнения и отсчета времени, выход которого является выходом устройства. Блок 11 управления подключен к матрице 1 фотоприемников (импульсы строчной и кадровой разверток), управляющему входу ключа 2, коррелятору 4, выходу блока 10 дополнительного суммирования,сравнения и отсчета времени.Устройство работает следующим образом.На нулевом такте работы в момент вре.мени т о экспонируется матрица 1 фотоприемников, начинается отсчет времени в блоке10, Изображение в верхней (нулевой) строкематрицы Ы Х(т 0) представляет собой последовательность импульсов, амплитуда которьпропорциональна освещенности в ячейкестроки, Изображение У(1, записанное впервой строке матрицы 1, отстоящей от нулевой строки на расстоянии 1., можно рас"сматриват как изображение в нулевой строкеХ (1 О), смещенное на время запаздыванияез = 1 /Ч, где Ч - скорость движенияизображения, т, е. Х (1 о) через время дпрошло бы расстояние 1. со скоростью Ч изаняло бы место изображения У 1(1 )=Х(т -еъ), В качестве Ь выступает запаздываоние (транспортное) движущегося со скорос.тью Ч изображения во втором фотоприемник 994 аотносительно первого фотоприемника, разнесенные на кадровое (базовое) расстояние, Изоб.аражение У(1 ), записанное во второй строке,аналогично может быть представлено такУ(о) = Х(ео - 2 еа), если расстояние междустроками, что обычно и имеет место, одинаковое и равно 1 Вообще для любой из строкматрицы может быть предложена модельУЕ(то) = Х (со - Ю )10 где 1=0,1,2й,Штриховкой в блоке показаны для при. мера регистры памяти в строчно в кадров матрице ПЗС куда У 0 (то) заносятся на ну. левом такте работы и откуда они затем по одному опрашиваются соответствующими командами блока 11 управления.На нулевом такте ключ 2 открыт и в регистр 5 записывается разностьоо) " о)о-)оа ФО-о),5 994994нок ординат корреляционных функций будетравна нулю Е к"еа)-к"(е -;.,):о6=о5 будет прямо пропорционален скорости движе. ния изображения и в этот момент на выходе блока 10 появляется отсчет. После получения отсчета;сигнал поступает в блок 11 и работа устройства повторяется сначала заданием соот ветствующих. команд, блоком 11.Предлагаемое устройство обеспечивает высокую точность определения параметров движения изображения, некритично к виду корреляционной функции сигналов изображения,Отсчет производится сразу же в момент достижения абсциссы максимума сформированной взаимокорреляционной функции (при этом максимум в явном виде не определяется.).Быстродействие устройства, длительность цикла измерения определяется целиком и полностью лишь быстродействием выполнения ариффметических операций опроса матрицы, перемножения, суммирования.В предлагаемом устройстве отпадает необходимость в реализации специального блока центрирования хотя бы одного из сигналов, отсутствует указатель экстремума фун. кции, реализация которого обычно сложна.Формула изобретенияУстройство для определения параметров движения изображения, содержащее фотозпектрический преобразователь. коррелятор,состоящий из двух регистров, одноименныевыходы которых соединены с входами пораз.рядной схемы перемножения, выходы кото.рой подключены к входам сумматора, и блокуправления, соединенный с управляющимивходами фотоэлектрического преобразователяи коррелятора, о т л и ч а ю щ е е с ятем, .что, с целью повышения быстродействияи точности, в него введены ключ, блок постоянного временного запаздывания, блоквычитания и блок дополнительного суммирова.ния, сравнения и отсчета времени, вход кото.рого подключен к выходу коррелятора, авыход - к входу блока управления, приэтом фотоэлектрический преобразовательвыполнен в виде матрицы фотоприемников,выход которой соединен через ключ с первымвходом блока вычитания, подключенного квходу первого регистра, и непосредственно свходом второго регистра, управляющий входключа соединен с блоком управления, а вто,рой вход блока вычитания соединен через.блок постоянного временного запаздыванияс выходом ключа.Источники информации,принятые во внимание при экспертизе1. Козубовский С. Ф. Корреляционные экс.тремальные системы. Киев, Наукова думка",1973, с. 7.2. Авторское свидетельство СССР У 378896,кл. 6 06 6 9/ОО, 1971 (прототип).994994 Составитель В Техред М,Надь е Редактор А. Ш Заказ 631 2 Подписи ВН 130 Тираж 871ИПИ Государственного комитета СССо делам изобретений и открытий
СмотретьЗаявка
3347478, 15.10.1981
КУЙБЫШЕВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. В. КУЙБЫШЕВА
ВОЛКОВ ИГОРЬ ИВАНОВИЧ, СЕМЕНЫЧЕВ ВАЛЕРИЙ КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G01P 3/68
Метки: движения, изображения, параметров
Опубликовано: 07.02.1983
Код ссылки
<a href="https://patents.su/4-994994-ustrojjstvo-dlya-opredeleniya-parametrov-dvizheniya-izobrazheniya.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для определения параметров движения изображения</a>
Устройство для контроля состояния контактов логических блоков

Номер патента: 1061145
Опубликовано: 15.12.1983
МПК: G06F 11/30
Метки: блоков, контактов, логических, состояния
...Информационный вход первого ключа 6 соединен с шиной 14 нулевого потенциала, а инфо- мационный вход второго ключа 7 - с ши ной 13 единичного потенциала. Выходы ключей 6 и 7 объединены и через первый согласующий резистор 8 соединены с вторым входом элемента сравнения 5 и входом-выходом 16 контроля устройства Выход сумматора 4 по модулю два соединен с входом-выходом 16 контроля устройства, а через второй согласующий резистор 9 вход-выход 16 контроля устройства подключается к контактам контролируемого логического блока 17.20Устройство предназначено для контроля логических блоков, контакты которого могут принимать следующие три состояния: Вход - контакт является входом контролируемого логического блока, Выход контакт является выходом...
Устройство для считывания и обработки изображений

Номер патента: 1513486
Опубликовано: 07.10.1989
Авторы: Гайда, Кожемяко, Теренчук
МПК: G06K 9/00
Метки: изображений, считывания
...соответственно с прямыми. выходами второго, третьего и первого Р-триггер ов с ос ед него (1-1) -г о логическогоанализатора, а выходы первого и второго, элементов ИЛИ подключены квторому и третьему входам элементаИ-НЕ, четвертый и пятый входы элемента И-НЕ соединены с прямыми выходамипервого и третьего Р-триггеров этого же логического анализатора, первые входы третьего и четвертого элементов ИЛИ и восьмой вход элементаИ-НЕ соединены с прямыми выходамисоответственно первого, третьего ивторого Р-триггеров соседнего Ц++1)-го логического анализатора, а шестой и седьмой входы элемента И-НЕ -с выходами третьего и четвертого элементов ИЛИ.3. Устройство по п.1, о т л и ч аю щ е е с я тем, что блок управле ния строчными шинами содеРжит...
Преобразователь аналовоггового сигнала во временной интервал

Номер патента: 552694
Опубликовано: 30.03.1977
Авторы: Мальцев, Сластенко, Чернй
МПК: H03K 13/20
Метки: аналовоггового, временной, интервал, сигнала
...то преобразователь не отрабатывает этого изменения входного сигнала.Целью изобретения является повышение точности преобразования.Поставленная цель достигается тем, что в преобразователе аналогового сигнала во временный интервал, содержащем входной переключатель, первый вход которого подключен к Е- т 1")М 2694пропорциональным величине входного напряжения в момент окончания первого цикла.По команде блока 3 входной переключатель 1 подключает на вход элемента сравнения 2 входной сигнал. Триггер 8 по этому сигналу не переключается. Элемент сравнения 2 работает так, что при входных сигналах У)У, 1 где У, - напряжение на выходе интегратора 4; У - входное напряжение) ключ 7 подключает выход элемента сравнения 2 через суммирующий резистор 6...
Блок оптического считывания информации для оптического ассоциативного запоминающего устройства

Номер патента: 917644
Опубликовано: 23.10.1985
Авторы: Вербовецкий, Федоров
МПК: G11C 11/42
Метки: ассоциативного, блок, запоминающего, информации, оптического, считывания, устройства
...инфор мации (БОСИ) для ОАЗУ содержит матрицу волоконных световодов (МВС) 2,растровую матрицу цилиндрических линз 3, цилиндрический коллективныйг объектив 4, цилиндрический проекционный объектив 5 и матрицу фотоприемников 6.МВС 2 преобразует, например, любое выходное изображение ОАЗУ 1 в растр параллельных или гомоцентрических ,пучков, оси которых параллельны оптической оси блока, либо осуществляет проецирование любого выходного изображения ОАЗУ 1 на растровую матрицу цилиндрических линз 3.Растровая матрица цилиндрических линз 3, например, преобразует падающие на нее гомоцентрические пучки в параллельные и осуществляет фокусировку блоков пучков и отдельных пучков во взаимно ортогональных плоскостях. В случае падения на матрицу 3...
Способ передачи сигналов точного времени по линиям связи с переменным временем распространения и устройство для его реализации

Номер патента: 858058
Опубликовано: 23.08.1981
Авторы: Агафонов, Алявдин, Виноградов, Глазбург, Девяткин, Муринов, Туманов
МПК: G08C 19/28
Метки: временем, времени, линиям, передачи, переменным, распространения, реализации, связи, сигналов, точного
...импульсов, приходящих сдатчика 4. Корректируемая таким методом последовательность подаетсяна блок 7 упреждения, формирующийупрежденную шкалу времени. Это позволяет корректировать время упреждения непрерывно.45 50 55 ЬО Ы передатчик 1 с помощью циклового синхронизатора 11 выделяет маркер, который используется для работы блока 8слежения.о;: 8 слежения (фиг.2) работаетследующим образом.Формирователь 23 по импульсам,приходящим с блока 7 и датчика 4,вырабатывает сигнал, длительностькоторого равна времени упреждения Т)и подает его, на измеритель 24 расхождения между Т и Т . После окончания этого сигнала через время, равное Т на измеритель 24 поступаетимпульс с синхронизатора 11, по которому, при наличии разности между Туи Т измеритель...
Предыдущий патент: Устройство для определения параметров движения изображения
Следующий патент: Акустический измеритель скорости течения
Случайный патент: Привод вспомогательного движения шлифовального станка