Контурная система числового программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
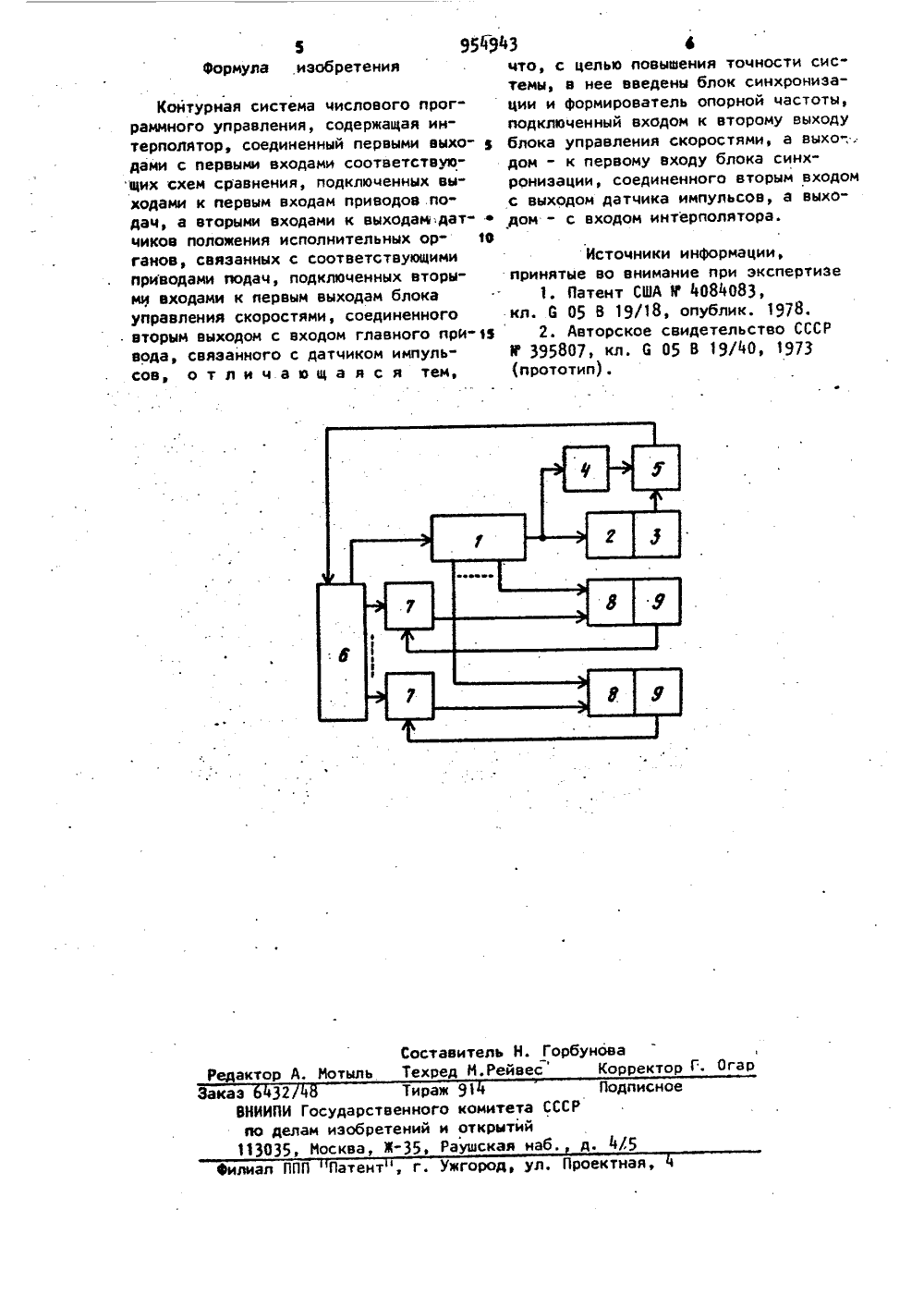
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Совет сникСоциапистическиаРеспублик ,и 954943(6 ) Дополнительное к авт. свнд-ву(22) Заявлено 02. 06. 80 (21) 2995079/18-2 Йс присоединением заявки Ж -(5 )М. Кд,С 05 В 19/18 ГаеуАерстын 3 ай кеиктет СССР ао делан нзоеретекий н открытий(72) Авторы изобретем Водовозов, А.А. Тимофее А.Я. Зыков, В.И дена Ленина электротехн Ульянова (Ленина) енинградский ь им,СТЕНА ЧИСЛОВОГО ПРОГРАММНОГОУПРАВЛЕНИЯ(5 Й) КОНТУРН тома- и предавле тяже- аритлых обрабатывающих и крупногаб5 ных намоточных станков.Известна система программного управления с главным приводом и приводами подач, содержащая главный управ, ю ляющий вал. К главному управляющему валу подключен решающий прибор, создающий выходной аналоговый сигнал, который представляет абсолютное положение главного управляющего вала. К аналого-цифровому преобразователю подключены запоминающе устройства, каждое из которых запрограммировано для одновременного создания цифровоговыходного сигнала. С каждым запоми- гонающим устройством соединен позицион"ный элемент. Таким образом, большоечисло перемещаемых элементов одновременно устанапливаютсл в положеи"ошибок и Изобретение относится к а тике и вычислительной техник назначено для программного у ния неидентичными координата иие, определяемое последовательно изменяющимся цифровым сигналом 11.Устройство отличается малой точностью при высокой сложности реализации следящего контура главного при вода и согласования движений приводов.Наиболее близким техническим решением к предлагаемому является устройство, содержащее последовательно соединенные интерполятор, блок управления скоростями и подключенные к нему главный привод с импульсным датчиком и приводы подач с датчиками перемещения, а также элементы сравнения, каждый иэ которых соединен с интерполятором, одним из приводов подач и соответствующим датчиком перемещения 2 .Достоинством известного устро" ства является отсутствие в нем о пути главного привода, не охваченного контуром положения. Но устройство не обеспечивает высокой то954943ности отработки. программ, так как скорость главного привода, наряду с постоянной составляющей, заданной программой, имеет переменную составляющую (помеху), вызванную воз мущениями типа дисбаланса шпиндельных узлов, эксцентриситета обрабатываемых изделий, прерывистого характера резания и т.п. Колебания скорости главного привода преобразуются 10 импульсным датчиком в тактовую частоту интерполятора, управляющего движением приводов подач. Нестационарный характер задания последних в свою очередь возбуждает новые , 3 динамические нагрузки. на валу главного привода. Это является одной из причин, препятствующих внедрению систем с ведущей коордйнатой в серийное производство. 26Цель изобретения - повышение точности системы.Поставленная цель достигается тем, цто в контурную систему числового программного управления, содер Э жащую интерполятор, соединенный первыми выходами с первыми входами соответствующих схем сравнения, подключенных выходами к первым входам приводов подач, а вторыми входами к выходам датчиков положения исполнительных органов, связанных с соот. ветствующими приводами подач, подключенных вторыми входами к первымвыходам блока управления скоростями,ЭЗ .соединенного вторым выходом с входомглавного привода, связанного с датчиком импульсов, введены блок синхронизации и формирователь опорной час" тоты, подключенный входом к второму выходу блока управления скоростями,а выходом - к первому входу блокасинхронизации, соединенного вторым входом с выходом датчика импульсов, а выходом - с входом интерполятора.43,.На чертеже дана блок-схема системы.Система содержит блок 1 управления скоростями, главный привод 2, датчик3 импульсов, формирователь 4 опорнойчастоты, блок 5 синхронизации, интер 0 полятор 6, схемы 7 сравнения, приво. ды 8 подач, датчики 9.При аналоговом:характере сигналазадания скорости главного привода 2 формирователь 4 опорной частоты пред- ззставляет из себя ааговый или регулируемый по скорости электропривод мощностью несколько десятков ватт с импульсным датчиком, число импульсов на выходе которого соответствует числу импульсов на выходе датчика 3 импульсов главного привода 2 (в единицу времени). При дискретном сигнале задания скорости главного привода 2 Формирователем 4 опорной частоты является преобразователь частоты, согласуоций частоту задания скорости главного привода 2 с частотой его импульсного датчика 3.Устройство работает следующим образом.С выхода блока 1 управления скоростями подаются сигналы задания скорости на разомкнутый по пути главньй привод 2, обработка которого фиксируется датчиком 3 импульсов, и на формирователь 4 опорной частоты. Сигнал с датцика 3, содержащий постояннув составляющую и помеху, и сигнал с формирователя 4 опорной частоты поступают в блок 5 синхронизации, который запоминает импульсы, идущие в случайном порядке от датчика 3, до прихода очередного импульса с формирователя 4 опорной частоты, импульс отработки появляется на выходе блока 5 синхронизации. Нормализованная таким образом последовательность импульсов отработки главного привода 2 используется в качестве тактовых импульсов интерполятора 6. С приходом каждого тактового импульса интерполятор формирует выходной импульсглавного привода 2 и сигналы задания положения на схемы 7 сравнения приводов 8 подач, куда поступают сигналы отработки с датчиков 9 перемещения. управляемые как сигналом рассогласования по пути, так и сигналом задания скорости от блока 1 управления скоростями, приводы 8 подач работают в следящем режиме.Предлагаемая система обеспечивает инвариантность движения приводов подач, относительно возмущений на валу главного привода при сохранении ос.новного достоинства прототипа - инвариантности движения главного привода относительно управляющих воздействий.Технико-экономический эффект от внедрения предлагаемой системы заключается в повышении точности отработки программы благодаря исключению колебаний рабочих органов, неизбежных в известных устройствах в результате взаимовлияния координат.Контурная система числового программного управления, содержащая интерполятор, соединенный первыми выхо- у дами с первыми входами соответствующих схем сравнения, подключенных выходами к первым входам приводов .по" дач, а вторыми входами к выходаи;датчиков положения исполнительных ор в ганов, связанных с соответствующими приводами подач, подключенных вторыми входами к первым выходам блока управления скоростями, соединенного . вторым выходом с входом главного при- и вода, свяэанного с датчиком импульсов, о т л и ч а ю щ а я с я тем,что, с целью повыщения точности системы, в нее введены блок синхронизации и формирователь опорной частоты, подключенный входом к второму выходу блока управления скоростями, а выхо;. дом - к первому входу блока синхронизации, соединенного вторым входом с выходом датчика импульсов, а выходом - с входом интерполятора. Источники информации,принятые во внимание при экспертизе1, Патент США й 4084083)кл. С 05 В 19/18, опублик. 1978.2. Авторское свидетельство СССРУ 395807, кл. С 05 В 19/40, 1973Составитель Н. ГоТехред И.Рейвес Иотыл Редак Зак ПодписнССР Иосква, Ж 35, Раушская наб. д. 4/5 П Патент , г. Ужгород, ул. Проектна лиа 32 Тираж 91НИИПИ Государственного комитетаао делам изобретений и открытий13035,ж оваКорректор Г. Ога
СмотретьЗаявка
2935073, 02.06.1980
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВА
ЗЫКОВ АЛЕКСЕЙ ЯКОВЛЕВИЧ, ВОДОВОЗОВ ВАЛЕРИЙ МИХАЙЛОВИЧ, ТИМОФЕЕВ АНДРЕЙ АНАТОЛЬЕВИЧ, ГУРИНОВ АНАТОЛИЙ ИВАНОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: контурная, программного, числового
Опубликовано: 30.08.1982
Код ссылки
<a href="https://patents.su/3-954943-konturnaya-sistema-chislovogo-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Контурная система числового программного управления</a>
Гидропанель управления реверсом привода ползуна и приводом подач
Номер патента: 566976
Опубликовано: 30.07.1977
Авторы: Иванов, Окунев, Столбов, Федоров
МПК: F15B 15/00
Метки: гидропанель, подач, ползуна, привода, приводом, реверсом
...занимают положение, соответствующее окончанию подачи стола. В расточку 33 золотника 16 через проточку 22 и радиальный канал в золотнике подводится давление, а расточка 32 через радиальный канал и дроссель 24 соединяется со сливом, поэтому на золотник 16 действует усилие, удерживающее этот золотник и через вилку 34 золотник 8 в крайнем левом положении во время рабочего хода ползуна 38,В конце рабочего хода ползуна 38 кулачок 40 воздействует через механизм переключения на валик управления 17, поворачивает его и перемещает золотник управления 16 вправо, например через реечную передачу, Золотник 16 при этом вытесняет масло из торцовой камеры 23 в правой боковой крышке панели через дроссель 25, а в торцовую камеру 23 в левой боковой...
Гидравлический привод подач камнерезноймашины

Номер патента: 309132
Опубликовано: 01.01.1971
МПК: E21C 29/00, E21C 47/10
Метки: гидравлический, камнерезноймашины, подач, привод
...понижается и скорость увеличивается. В первом случае расход через клапан 8 уменьшается, во втором - увеличивается. При рабочем ходе клапан б закрыт, в полости 19, связан ной с рабочей полостью гидроцилиндра 18посредством клапана 7, устанавливается давление, соответствующее настройке последнего.Усилие на поршне 8 от этого давления и от 15 усилия пружины 18 противодействует усилиюот рабочего давления в полости 18, удерживая поршень в правом крайнем положении, Клапан 4 при рабочем ходе закрыт, так как давление в полости 18 выше давления в поло сти 19.При встрече инструмента с твердыми включениями в камне происходит внезапное резкое повышение давления в полости 18, значит и резкое повышение усилия подачи не про.25 изойдет, так как...
Устройство для управления приводом подачи стола плоскошлифовального станка

Номер патента: 1348771
Опубликовано: 30.10.1987
МПК: G05B 19/00
Метки: плоскошлифовального, подачи, приводом, станка, стола
...И 8, на другой вход которого поступают импульсы от датчика 7 числа импульсов, В результате импульсы проходятс выхода элемента И 8 через делитель 9 импульсов с коэффициентом 0,5 на вход элемента ИЛИ 10, а далее - через ключевой элемент 11 - на счетный вход счетчика 12, После оконча 5 ния пуска привода сигналы на входах блока 23 сравнения равны и элемент И 8 не пропускает импульсы с датчика 7 числа импульсов, а в счетчике импульсов 12 записано число, пропорциональное половине перемещения при пуске, Когда стол с закрепленной на нем деталью достигает датчика 1 6 среднего положения, т.е, прошлифуется по ловина обрабатываемой детали, на вход триггера 13 поступает сигнал, который переключает триггер 13, В результате на входе элемента И 17...
Привод подачи станка

Номер патента: 632544
Опубликовано: 15.11.1978
МПК: B23Q 5/00
...через суммирующий и корректирующий узел 8 и усилитель 11.Привод работает следующим образом.Формула изобретения 40 При подаче команды на быстрый подвод от усилителя 11 на двигатель 4 подается напряжение питания. Одновременно с этим питание управления подается на муфту б от блока 9. Ток управления муфты задается таким, чтобы он обеспечивал на муфте крутящий момент, дпстаточный для подачи пиноли 1 на скорости холостого хода. Сигналы, поступающие в узел 8 с датчика 7, при холостых ходах не регистрируются. Быстрый под вод осуществляется до тех пор, пока инструмент не коснется поверхности детали. При касании инструментом поверхности детали на нем появляется осевая сила, вызывающая появление сиг-(5 нала от датчика 2. Сигнал датчика 2 поступает...
Привод подач токарно-винторезногостанка

Номер патента: 831503
Опубликовано: 23.05.1981
Автор: Шаклеина
МПК: B23Q 5/00
Метки: подач, привод, токарно-винторезногостанка
...механизма изменения .шага;- передаточное отношеЙи.к.й,ние множительногомеханизма коробки подаЧе:х- шаг ходового винта;йи- шаг нарезаемой резьбы.Подставив.значения передаточных отношений механизмов получим уравнениекинематического баланса для предлагаемого приводй подач,459, Ъ,71 Э, Л 40,5 И 1 1 ,ь1 11;х.Ь 1 хк 2 т 5,75 хв(, )9) ъ 75х,Б, 4, 4,5, , Р 51 ха) (ъ 7 д75ты )(д) ха кР. Включение определенным образом пар шестерен механизма 18 изменения шага, а также множительных механизмов 31 и 1 коробки подач и коробки скоростей соответственно позволяет получить весь ряд+хб хе ахв Фх 25 375 Ьх 1 1х 8 45 5 8315стандартных метрических резьб по ГОСТ10177-62 и ГОСТ 9150-59(СЭВ 18175),Определенными переключениями получают весь ряд стандартных...
Предыдущий патент: Копировальное устройство для станков
Следующий патент: Система программного управления выбором инструмента
Случайный патент: Отвал землеройной машины