Система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
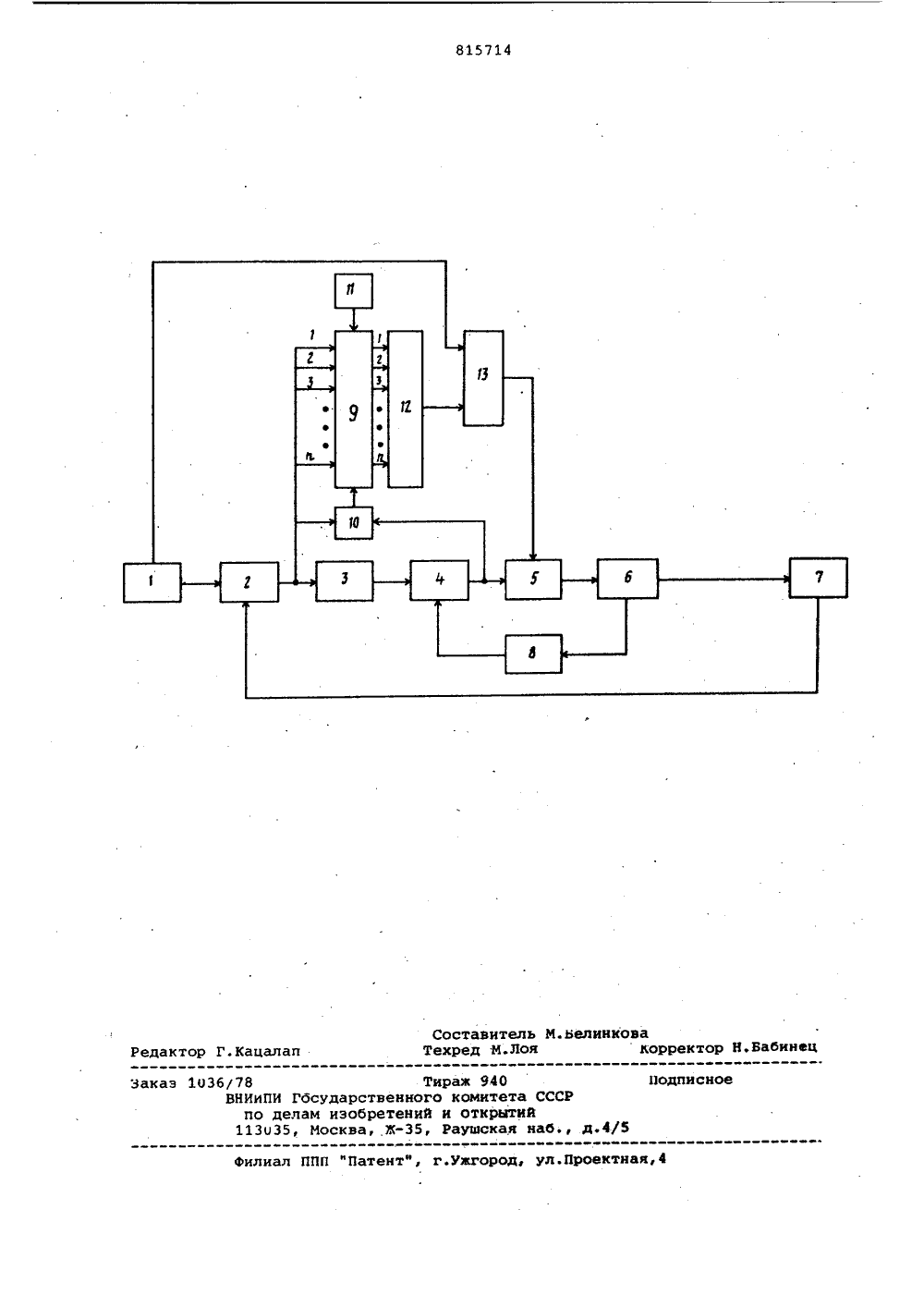
Союз Сфветскнх Соцналнстнческнк Республик.С 05 В 19/19 с присоединением заявки Йф Государственный квинтет СССР ио Аеааи. изобретений н открытий(71) Заявитель5 4) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ Изобретение относится к автоматическому управлению и может быть использовано в позиционных системах управления различными промышленными объектами.5Известны системы программного управления, содержащие сумматоры, релейные элементы, исполнительный двигатель, тахогенератор и преобразователи 111 и 121 .Недостаток этих устройств - сложность их настройки.Наиболее близкои к предлагаемой потехнической сущности является система программного управления, содержащая блок управления, соединенный через блок сравнения с преобразОвателемкод-аналог и последовательно соединенные переключатель и исполнительныйпривод, а также датчик обратной связи,20выход которого подключен ко второмувходу блока сравнения 131.недостатком этой системы являетсяее низкое быстродействие.Цель изобретения - повышение быстродеиствия системы,Поставленная цель достигается тем,что система содержит сумматор, генератор импульсов, датчик скорости, компаратор и последовательно соединенные 30 вычитатель, блок совпадения и триггер, второй вход которого соединен со вто рым выходом блока управления, а выход с первым входом переключателя, вторым входом подсоединенного к одному входу сумматора и выходу комапратора, первым вход которого соединен с выходом преобразователя код-аналог, а второй вход через датчик скорости - со вторым выходом исполнительного привода, другой вход сумматора соединен с выходом блока сравнения и входами вычитателя, второй вход которого подключен к выходу генератора импульсов.На чертеже представлена блоксхема предлагаемои системы.Система содержит блок 1 управления, блок 2 сравнения, преобразователь 3 код-аналог, компаратор 4, переклюф: чатель 5; исполнительный привод 6, датчик 7 обратной связи, датчик 8 скорости, вычитатель 9, сумматор 10, генератор 11 импульсов, блок 12 совпадения и тригге 13.Блок 1 задания координат выдает цифровой код перемещения, которое необходимо отработать, и устанавливает в "1" триггер 13. Блок 2 сравнения определяет разность между заданным и действительным положением нагрузки. Пре 815714образователь 3 код-аналог 1 реобразует "код этой разности в аналоговый сигнал. Компаратор Я сравнивает сигналы ошибки и отрицательной обратной связи по скорости, поступающей с датчика 8 скорости. Переключатель 5 подключет к исполнительному приводу 6 напряжение требуемой полярности, Датчик 7 обратной связи измеряет действительное значение регулируемой координаты. Вычитатель 9 запоминает код ошибки в момент определяемый сумматором 10.Генератор 11 подает импульсы на счетный вход вычитателя 9. Сумматор 10 устанавливает один из возможных режимов работы вычитателя 9 (установка начального значения или вычитание)Блок 12 сов Ъ падения определяет момент, когда содержимое вычитателя 9 становится равным нулю и устанавливает триггер 13 в "0", что соответствует разрешению на изменение состояния переключателя 5. 20 состояние "1" триггера 13 запрещает изменение состояния переключателя 5.Система работает следующим образом.В начальный момент триггер 13 установлен в "0", а выходные величины 5 сумматора 10 имеют равные знаки, и вычитатель 9 работает в режиме установки начального значения, Блок 1 выдает сигнал на установку в "1" триггера 13 в начале движения, поэтому управ- ЗО ляющее воздействие имеет знак, противоположный знаку начальной ошибки.В момент изменения знака на выходе компаратора 4 выходная величина сумматора 10 переключает вычитатель 9 иэ режима в установки начального значения в режим вычитания импульсов, поступающих от генератора 11. Когда содержимое вычитателя 9 становится равным нулю, сигнал блока совпадения 12 устанавливает триггер 13 в "0". На переключатель 5 поступает сигнал переключения и управляющее воздействие зменяет свой знак на противоположный.Подбором частоты следования импульсов генератора 11 нетрудно добиться, чтобы длительности первого и второго интервалов управления незначительно отличались от значений, соответствующих оптимальному по быстродействию управлению, а заключительный участок переходного процесса проходил в скользящем режиме. Это обеспечивает высокое быстродействие в сочетании с отсутствием перерегулирования и плавным подходом нагрузки к заданному положению.Формула изобретенияСистема программного управления,содержащая блок управления, соединенный через блок сравнения с преобразователем код-аналог и последовательно соединенные переключатель иисполнительный привод, а также датчикобратной связи, выход которого подключен ко второму входу блока сравне,ния, о т л и ч а ю щ е е с я тем,что, с целью повышения быстродействиясистемы, она содержит сумматор, генератор импульсов, датчик скорости,компаратор и последовательно соединенные вычитатель, блок совпадения итриггер, второй вход которого соединен со вторым выходом блока управления, а выход - с первым входом переключателя, вторым входом подсоединенного к одному входу сумматораи выходу компаратора, первый входкоторого соединен с выходом преобразователя код-аналог, а второй входчерез датчик скорости - со вторымвыходом исполнительного привода, другой вход сумматора соединен с выходом блока сравнения и входами вычитателя, второй вход которого подключен к выходу генератора импульсов,а третий вход - к выходу сумматора.Источники информации,принятые во внимание при экспертизе1. Павлов А.А. Синтез релейных систем, оптимальных по быстродействию.м., "Наука", т 966, с.98-1 П 4,2, Авторское свидетельство СССРР 459761, кл. С 05 В 11/16, х 975.3, синтез позиционных систем программного управления. Под,ред. Вавилова А.А. Л., "Машиностроение", 1977.с.256-271 (прототип)./78НИиПИ Гбсударпо делам изоб 113035 р Москва подписное акаэ 1036 Тираж 94В ственного комитретений и открытЖРаушск наб., д.4/ филиал ППП "Патентф, г.ужгород, ул.Проектн Составитель М.Белинковаедактор Г.Кацалап Техред М.Лоя корректор Н.Бабин
СмотретьЗаявка
2618905, 18.05.1978
МИНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
ОНАЦКИЙ ЯНУШ ИВАНОВИЧ, ПАШКЕВИЧ АНАТОЛИЙ ПАВЛОВИЧ
МПК / Метки
МПК: G05B 19/19
Метки: программного
Опубликовано: 23.03.1981
Код ссылки
<a href="https://patents.su/3-815714-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления</a>
Синхронный датчик кода морзе

Номер патента: 907841
Опубликовано: 23.02.1982
Авторы: Кудрявицкий, Таранченко
МПК: H04L 15/03
Метки: датчик, кода, морзе, синхронный
...14 и 15 оптронов 7 и 8 и в зависимости от полярности указанных посылок возбуждается 25 один иэ светодиодов 14 или 15, Вследствие этого попеременно открываются Фотоприемники 1 б и. 17 оптронов 7 и 8. На выходе блока 6 при смене полярности госылок возникают импульсы, из Зв которых в формирователе 9 формируются сигналы синхронизации задающего генератора 1. Блок 10 устанавливает частоту задающего генератора 1 в соответствие со скоростью передаци инфор- З 5 мации синхронной телеграфной аппаратуры 13Регулируемый делитель 11 уменьшает в целое число раз частоту следования импульсов задающего генератора 1 и обеспечивает тем самым необходимую длительность и частоту следования "точек". Изменением коэффициента деления регулируемого...
Электронный датчик кода морзе

Номер патента: 687617
Опубликовано: 25.09.1979
МПК: H04L 15/28
Метки: датчик, кода, морзе, электронный
...5 кода"тиреиточек . После этого блок 10запуска выдает сигнал по ксторому инфор 25мация с датчика 5 кода считывается впараллельном коде в регистр 4 сдвига,запускается задающий генератор 1 и триггер 3 устанавливается в нулевое состояние. При этом коммутатор 2 подключаетвыход задаюшего генератора 1 к входутриггера 8, на нулевом выходе которогопоявляется импульс, продвигающий информацию в регистре 4 сдвига на одну ячейку.35При поступлении на вход дещифратора7 комбинации "111" или 101" последний вырабатывает сигнал на выходах "тире" или "точка" соответственно. Этот сигнал поступает на выходлой согласующий 4 Облок б. Второй импульс с задаюцего генератора 1 переводит триггер 8 в единичное состояние, сигнал с единичного выхода которого...
Датчик кодов для устройства контроля запоминающих блоков

Номер патента: 521608
Опубликовано: 15.07.1976
Авторы: Виталиев, Гвинепадзе, Логинова, Смирнов
МПК: G11C 29/00
Метки: блоков, датчик, запоминающих, кодов, устройства
...После этого ближайший синхроимпульс, пришедший по шине 6, осуществляет параллельную перепись информации с регистра 2 на регистр 3, а далее счетчик адреса, т. е, регистр 16, сбрасывается в состояние 000 и процесс матричного преобразования повторяется над новым вектором 7 7 7, и т д.010 О 0 Са 0 О ООи г мъ ят) последовательность, генерируемая датчикомт представляет собой линейную возвратную т последовательность. В случае произвольной матрицы А последовательность на выходе датчика представляет собой суперпозицию и Э линейных возвратных последовательностей, подчиняющихся одному и тому же линейному преобразованию, показанному в выражении (3), но сдвинутых одно относительно другого на величину, которая определяется кон-кретным...
Датчик кода морзе

Номер патента: 508951
Опубликовано: 30.03.1976
Авторы: Баландин, Катин, Семенов
МПК: H04L 3/04
...10,. Одновременно триггер 11, возвращается в исходное состояние, и выводится из исходного состояния триггер 11 ь которыи тем самым обеспечивает совпадение сигналов на следующей схеме 12, совпадения с аналогичным продвижением информации в следующую запоминающую линейку. Такое продвижение информации осуществляется вплоть до записи в последнюю запоминающую линейку 10 с соответствующей работой каждого элементарного блока 8 управления. Элементы 13 1313 задержки необходимы для того, чтобы запись информации в запоминающие линейки буферното накопителя 4 произошла раньше, чем поступит на них сигнал считывания от элементарных блоков блока 8 управления. Считывание с последней запоминающей линейки 10 производится по сигналу от триггера 23 блока 7...
Датчик кода морзе

Номер патента: 771899
Опубликовано: 15.10.1980
МПК: H04L 15/28
...сдвига4 появляется сигнал, который открываетпервый элемент Запрет 6.Четвертый тактовый импульс поступаетна распределитель 1 и выходной согласующий блок 7. Выходной согласующий блок 7аозаканчивает формирование первого элемента знака Морзе длительностью 3(Тире)и начинает формирование паузы между первым и вторым элементами, В распределителе 1 сигнал со второй ячейки 15 продвигается в третью ячейку 16 и поступает на45 первую ячейку 29 блока установки длительности знака, но на выходе сигнал 0 отсутствует, так как предварительной записи информационного сигнала в первой ячейке 29блока установки длительности знака не было,На пятом такте выходной согласующийзоблок 7 заканчивает формирование паузы иначинает формирование второго элементазнака...
Предыдущий патент: Прогнозирующий регулятор
Следующий патент: Система экстремального регулирова-ния ctahkom
Случайный патент: 305530