Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 805245
Авторы: Андрюнин, Лакота, Лысенко, Моисеенков, Шведов
Текст
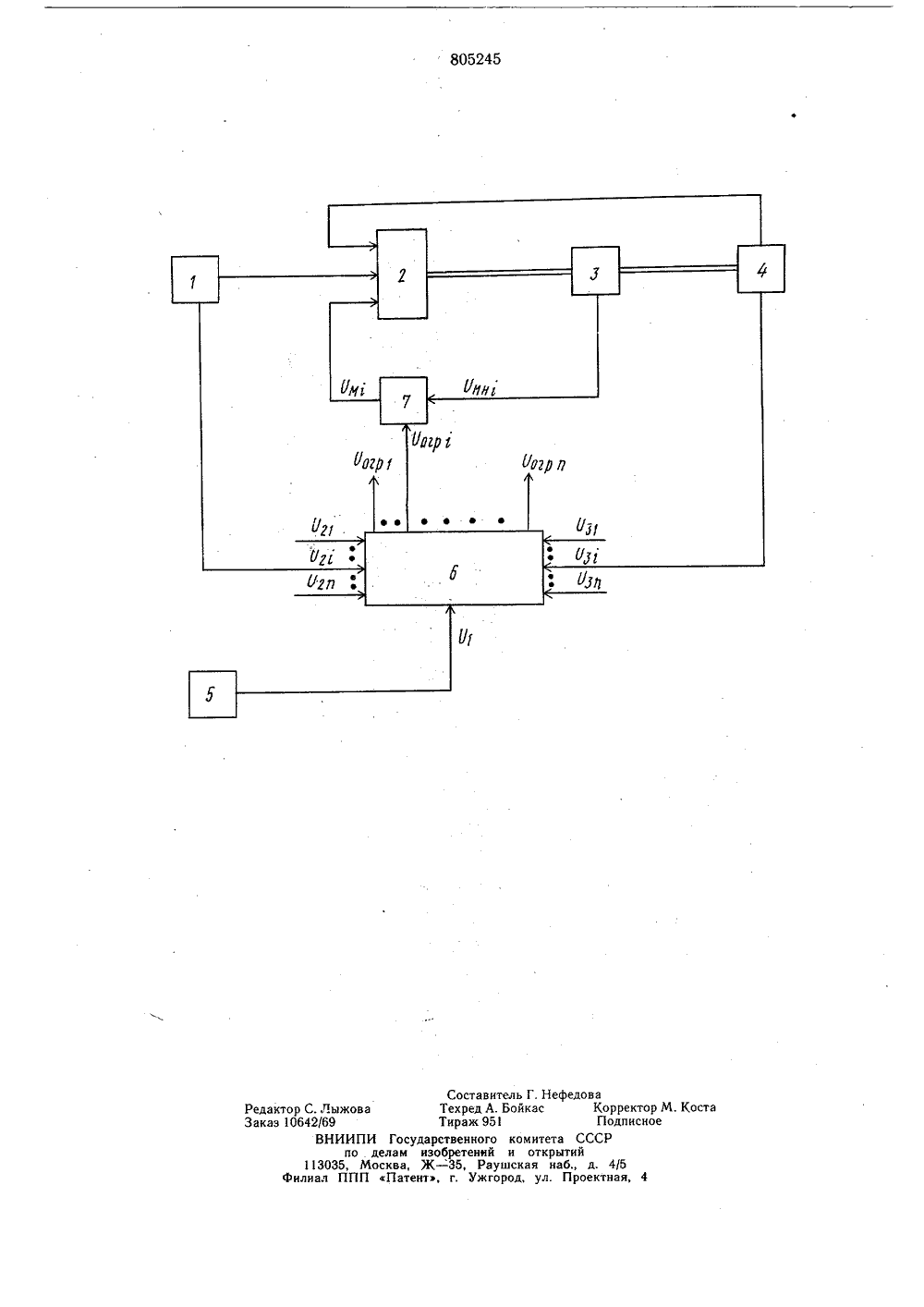
(51) М. Кб 05 В 11/ В 251 13/О явки-с присоединением Гееудерстееииый квинте 23) Приори девам изебретеини и открытий. В. Андрюнин, Н. А. Лакота, С. В. А. Моисеенков и В. Н. Ш 72) Авторы изобретения Зтт, РЦю Московское ордена Ленина и ордена Тру Знамени высшее техническое училище им ая амтел 4) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРО Изобретение и может быть систем управлеИзвестна сн лятором, содер и исполнительн жения задающе нов и усилители относится использова ния звеном стема упр жащая при ого органо го и испол к робототехнике но при создании манипулятора. авления манипуводы задающего в, датчики полоните,чьного оргаОднако она имеет большие вес и габаритй задающего органа,Наиболее близким техническим решением к изобретению является система, содержащая по каждой управляемой координате последовательно соединенные датчик положения задающего органа, привод, связанный кинематически через датчик момента исполнительного органа с датчиком положения исполнительного органа, первый выход которого подключен ко второму входу привода 2.Недостатком этой системы является отсутствие возможности дозирования оператором усилий, развиваемых исполнительным органом, и, как следствие, невозможность в общем случае манипулировать объектами, на которые наложены внешние связи. Цель изобретения - расширение области применения системы.Цель достигается тем, что система содержит последовательно соединенные датчикусилий оператора и блок вычисления зоны.нечувствительности и по каждой регулируемой координате функциональный преобразователь, первый вход которого подключенк соответствующему выходу блока. вычисления зоны нечувствительности, второй вход -к выходу датчика момента исполнительногоооргана, а выход - к третьему входу привода, вторые входы блока вычисления зонынечувствительности соединены с выходомкаждого датчика положения. задающего органа, а третьи входы - со вторым выходомкаждого датчика положения исполнительного органа.На чертеже представлена блок - схемасистемы,Схема содержит датчик 1 положения задающего органа, привод 2 исполнительного20 органа, датчик 3 момента исполнительногооргана, датчик 4 положения исполнительного органа, датчик 5 усилий оператора, блок6 вычисления зоны нечувствительности, функциональный преобразователь , Ч, Чз, Чз;.,5 1 о 15 го формула изобретения 25 30 35 50 гр Чмн, Чмг. - выходные сигналы датчика 5 усилий оператора, датчиков 1 положения задающего органа, датчиков 4 положения исполнительного органа, блока 6 вычисления зоны нечувствительности, датчиков 3 момента исполнительного органа, функциональных преобразователей 7 соответственно.Система работает следующим образом.Функциональный преобразователь 7 реализует следующую зависимость для каждого 1-го сигнала Ч; =- О, если ЧцнМогр).,=- К,; ,Чмя- Чо рвзКп 1 Чмн) 1,ес, ги; Ъц1 ног ,г.;с ," ь который постоянный коэффицкен г.Итак, функциональный преобразовательпредставляет собой зону нечувствительностипо каналу. момента, причем величина зонынечувствительности определяется величинойсигнала Чо поступающего с блока 6 вычисления зоны нечувствительности.Блок 6 вычисления зоны нечувствительности определяет величину Чогьв зависимости от положения задающего и исполнительного органов в пространстве и от величинысигнала Ч с выхода датчика 5 усилия оператора, который может располагаться, например, на рукоятке задающего органа. Величина Ч 1 задается оператором и являетсямодулем силы, которую манипулятору необходимо приложить к объекту, Направлениеэтой силы зависит от направления рассогласования конечной точки задающего органаи схвата исполнительного органа манипулятора.Когда исполнительный орган манипулятора находится в свободной зоне, оператор,увеличив. величину сигнала Ч 1 до максимального значения (величина зоны нечувствительности . функционального преобразователя 7 максимальна), практически размыкает моментные связи на приводах 2 исполнительного органа,и манипулятор работает какобычный манипулятор с жесткой системой управления одностороннего действия.Пусть манипулятор работает с объектом, накоторый наложены связи. В первый моментоператор отпускает датчик 5 усилия, т.е.сигнал Ч равен нулю. Г 1 ри этом приводы 2системы управления манипулятором охвачены глубокими обратными связями по развиваемому моменту, т.е. система управлениястановится мягкой. Оператор перемещаетзадающий орган в сторону предполагаемогодвижения системы исполнительный органобъект. При этом исполнительный орган недвижется, так как у него мягкая система управления. После этого оператор увеличивает сигнал Ч 1, воздействуя на датчик 5 усилия, исполнительный орган при этом развивает усилия, пропорциональные величине усилия оператора. Если при достаточно больших значениях Ч движения исполнительного органа не происходит, то оператор перемешает задающий орган в другом направлении. При этом блок 6 вычисления зоны нечувствительности перераспределяет величины Ъ, таким образом, чтобы усилие исполнительного органа было направлено в сторону перемещения конечной точки задаюшего органа. Далее цикл повторяется, пока операция не будет завершена.Применение изобретения позволит оператору дозировать усилия исполнительного органа и работать с объектами, имеющими связи без увеличения габаритов и веса задаюшего органа. При этом уменьшаются габариты, вес и энергопотребление схем управления приводами по сравнению с системой управления манипулятором двустороннего действия, так как такая система требует меньшего числа активных элементов. Система управления манипулятором, содержащая по каждой управляемой координате последовательно соединенные датчик положения задаюшего органа и привод исполнительного органа, кинематически связанный через датчик момента исполнительного органа с датчиком положения исполнительного органа, первый выход которого подключен ко второму входу привода, отличаюшаяся тем, что, с целью расширения области применения системы, она содержит последовательно соединенные датчик усилий оператора и блок вычисления зоны нечувствительности и по каждой регулируемой координате функциональный преобра зователь, первый вход которого подключенк соответствующему выходу блока вычисления зоны нечувствительности, второй входк выходу датчика момента исполнительного органа, а выход - к третьему вход; привода, вторые входы блока вычисления зоны нечувствительности соединеньг с выходами каждого датчика положения задающего органа, а третьи входы - со вторым выходом каждого датчика положения исполнительного органа.Источники информации,принятые во внимание при экспертизе1. Кулешов В. С. и Лакота Н. А. Динамика систем управления манипулятором. М.,Энергия, 1971, с. 56.2. Там жес. 70 (прототип).Г. Нефкас ов Корректор М, Коста Подписное митета СССРоткрытийкая наб., д. 4/5ул. Проектная СоставителРедактор С. Лыжова Техред А. БоЗаказ 10642/69 Тираж 95ВНИИПИ Государственного кпо делам изобретений и113035, Москва, Ж - 35, РаушсФилиал ППП Патент, г, Ужгород
СмотретьЗаявка
2614109, 05.05.1978
МОСКОВСКОЕ ОРДЕНА ЛЕНИНА И ОРДЕНАТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМЕНИ H. Э. БАУМАНА
АНДРЮНИН ВАЛЕРИЙ ВИКТОРОВИЧ, ЛАКОТА НИКОЛАЙ АНДРЕЕВИЧ, ЛЫСЕНКО СЕРГЕЙ АРКАДЬЕВИЧ, МОИСЕЕНКОВ ВАЛЕРИЙ АКСЕНТЬЕВИЧ, ШВЕДОВ ВАЛЕРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: манипулятором
Опубликовано: 15.02.1981
Код ссылки
<a href="https://patents.su/3-805245-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Датчик-реле температуры с автокоррекцией зоны нечувствительности

Номер патента: 257172
Опубликовано: 01.01.1969
Авторы: Смоленский, Тимошенков
МПК: G01K 11/04
Метки: автокоррекцией, датчик-реле, зоны, нечувствительности, температуры
...паром наполнителл 5, давление которого изменяется с изменением температуры,Подвижное дцо связано штоком 6 с рычагом 7, закрепленым с помощью шарнира 8. Второй рычаг 9 закреплен шарнирно на осп 10. Рычаг 7 имеет ряд упоров Л, В, С, Д, расположение и разность высот которых относительно друг друга определяютсл характеристикой заполнителя и величинами температур в моменты выдачи прибором выходных сигналов, В других исполнениях рлд упоров может быть заменец криволинейной поверхностью, так)ке Определяемой характеристикой цаполнителя датчика пз условия, что зона нечувствительности прибора по температуре - величина постоянная,1 а рычаге 9 укреплены устройства 11 для формирования выходных сигналов (например, микропереключателп),...
Формирователь зоны нечувствительности

Номер патента: 1397944
Опубликовано: 23.05.1988
Автор: Волгин
МПК: G06G 7/25
Метки: зоны, нечувствительности, формирователь
...Выход блока 2 вычитания образует основной выход 7 формирователя, выходы первого 3 и второго 4 АС образуют дополнительные выходы 8 и 9 формирователя.Если первый 3 и второй 4 АС являются соответственно максимиэирующим и минимизирующим, то их выходные напряжения определяются выражениямиЕ,=шах(П,Б,); 22=шип(2. ),где .1,12.Здесь "шах и "шп" есть определяющие операции непрерывной логики - операции выбора большей ("шах") и меньшей ("ш 1 п") переменной из двух переменных,Если первый 3 и второй 4 АС являются соответственно минимизирующим и максимизирующим, тоЕ,:шЫ(Ц,Ц,); Е =шах(ЕУ),где УЯ,.Таким образом, функциональный блок 1 воспроизводит функцию Едвухстороннего параллельного ограничения.Дпя фиг, 1 а2=К (У-ш 1 п(шах(У,ТУ,),П )Е=К...
Устройство для формирования зоны нечувствительности регулятора дуговой печи

Номер патента: 902331
Опубликовано: 30.01.1982
Автор: Кипригин
МПК: H05B 7/148
Метки: дуговой, зоны, нечувствительности, печи, регулятора, формирования
...Напряжения с выходов формирователейсигналов, пропорциональные изменениям сигналов напряжения и тока дуги,имеют одинаковую полярность, не зависящую от знака этих производных, и обуславливают при их наличии величину зоны нечувствительности выше минимального, т.е. сигналы с выходов формирователей действуют согласно, ,формирователи сигналов, пропорциональных изменениям сигналов параметров дуги, выполнены путем параллельного включения формирователя сигнала, пропорционального положительному значению производной, и Формирователя сигнала, пропорционального отрицательному значению производной параметра дуги, раздельная работа которых на общий выход обеспечивается благодаря подключению шунтирующих диодов параллельно...
Пневматический двухпозиционный регулятор с настраиваемой зоной нечувствительности

Номер патента: 1755256
Опубликовано: 15.08.1992
МПК: G05B 11/54
Метки: двухпозиционный, зоной, настраиваемой, нечувствительности, пневматический, регулятор
...может быть снабженреле с подпором, через нормально 755256закрытое сопло которого входнойканал соединен с датчиком уровнябарботажного типа, а плюсоваякамера реле соединена с каналомпитания.На фиг.1 показана схема регулятора; на фиг.2 - схема технологической установки с регулятором;10 на фиг 3 - пример выполнения сигнализатора температуры.Регулятор (фиг.1) содержитпервый 1 и второй 2 элементы сравнения, причем минусовая камера элемента 1 и плюсовая камера элемента2 соответственно соединены с каналами задания верхнего 3 и нижнего 1граничных значения параметра, аплюсовая камера элемента 1 и мину 20 совая камера элемента 2 подключенык входному каналу 5.Триггер 6 выполнен в виде элемента ИЛИ 7 и реле 8. Выход элемента 1 соединен с...
Способ самонастройки зоны нечувствительности

Номер патента: 220925
Опубликовано: 01.01.1968
Авторы: Виноградов, Дралюк, Синайский, Синицьш, Уральский
МПК: B21B 37/48
Метки: зоны, нечувствительности, самонастройки
...прп отклонепш регулируемого параметра (толщины или натяжсшя полосы) от заданного значения.На выход регулятора 1 подключено устройство 3, аналогичное поляризованному двухпозпцпопному без преобладания) реле. Положе:ше перекидного контакта этого реле вы ход устройства может быть и бссконтактнь:м)зависит от полярности сигнала, подаваемого на его вход.Перекидной онищак 1 еле коммутирустстоянное напряжение Ь на входе дпффсрсп цпрующего устройства 4, которос прп каждомсраоатыванип реле через диод 6 выдаст на вход пнтегрпрующсго устройства 6 один импульс l, увслпчпвгнощпй напряжение на его выходе па опредслснную вслп шну. Напряжс ис с 1 ЗН вводится в регулятор в качестве параметра, задающего величину зоны нечувствптеляистп (зн). На вход...
Предыдущий патент: Устройство для динамической индикациивремени суток и календаря
Следующий патент: Система управления многоканальнымэлектроприводом робота
Случайный патент: Устройство для управления асинхронным электродвигателем