Способ программирования траектории движения сельскохозяйственных агрегатов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 751343
Автор: Калюжный
Текст
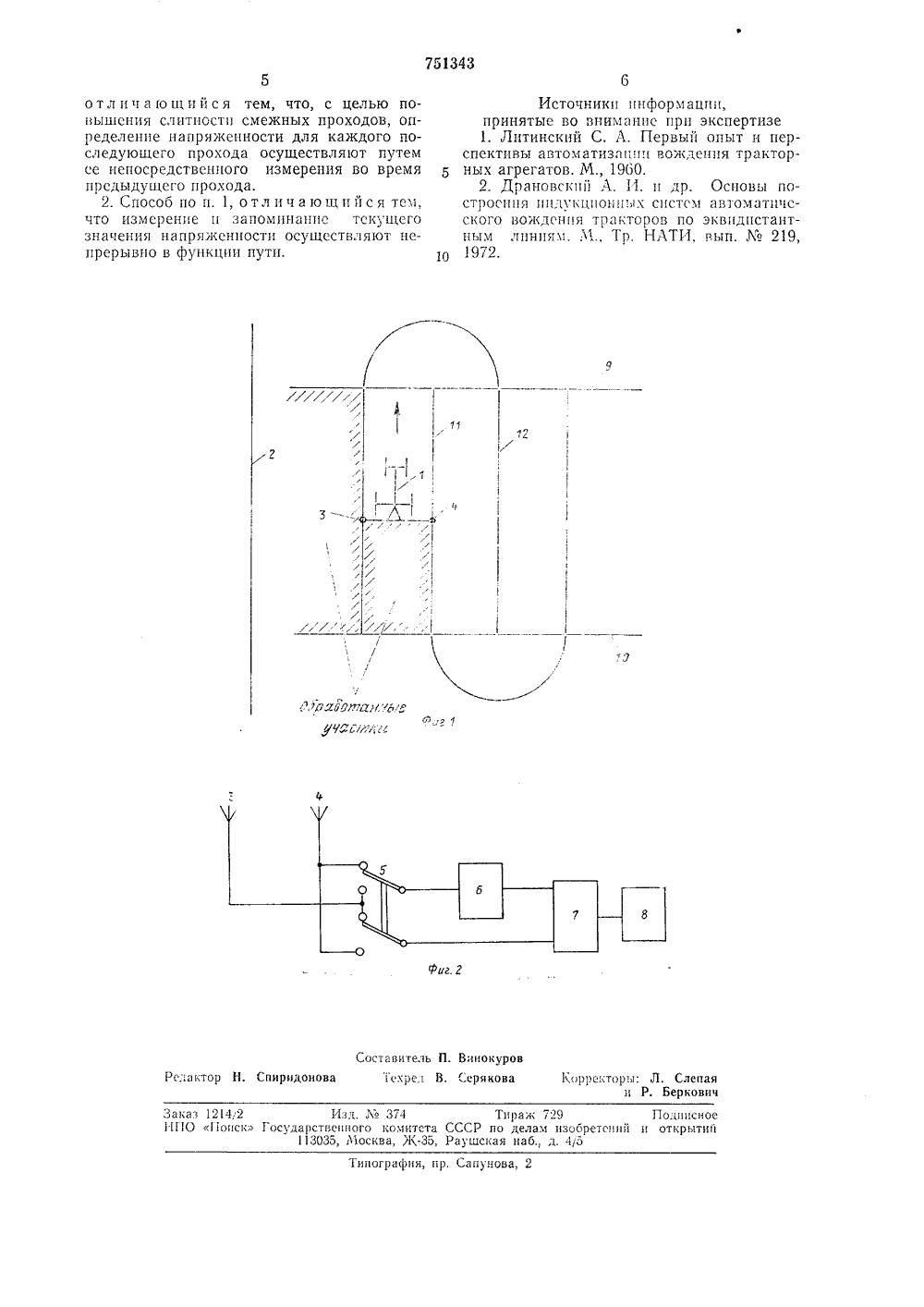
сава Советских Социалистических Республик(23) Приоритет сударстеенныи комите СССРелам изобретений и открытий 45) Дата опубликования описания 30.07.80) Заявител нститут хозяйс 4) СПОСОБ ПРОГРАММИРОВАНИЯ ТРАЕКТОРИИВИЖЕНИЯ СЕЛЪСКОХОЗЯЙСТВЕННЫХ АГРЕГАТОВ в Изобретение относится к области автоматизации вождения самоходных машин и может быть применено для создания систем комплексной автоматизации машинно-тракторных агрегатов.Известен способ программирования требуемой траектории движения автоматизированных сельскохозяйственных агрегатов при помощи реальных опорных линий на почве, создаваемых, например, следом пре дыдущего прохода агрегата 1).Недостатком данного способа является низкая надежность программ движения вследствие их возможных разрушений под действием влаги, ветра, температуры, сторонних тел.Известен также способ программирования траектории движения при ориентации агрегатов в электромагнитном поле радиопередатчика или удаленного токонесущего проводника, заключающийся в предварительном, до начала выполнения работы, определении и запоминании напряженности электромагнитного поля вдоль требуемой траектории движения. Вождение агрегата по такой программе осуществляют, измеряя напряженность электромагнитного поляместе нахождения агрегата, сравнивая его с требуемым значением (программой) и определяя ошибку автовожденость сравниваемых величин 2).При данном способе программирования время между запоминанием напряженности электромагнитного поля данного прохода и фактическим выполнением этого прохода может достигать многих часов и суток, в течение которых картина электромагнитного поля может изменяться, например, вследствие изменения влажности почвы. В результате опорные линии, напряженность которых предварительно была запомнена в системе автовождения, перемещаются в пространстве. Соответственно траектории отдельных проходов агрегата будут отличаться от расчетных и обработка почвы будет проводиться с огрехами либо перекрытиями. Это приводит к низкой слитности смежных проходов агрегата, что недопустимо по агротехническим требованиям.Целью изобретения является повышение слитности смежных проходов агрегата.Поставленная цель достигается тем, что при программировании траектории движения сельскохозяйственных агрегатов по способу, заключающемуся в предварительном создании в окружающем пространстве электромагнитного поля, определении и запоминании напряженности электромагнит00 65 ного поля вдоль требуемой траектории двпжсппя, определение напряженности для каждого последующего прохода осуществляют путем се непосредственного измерения во время предыдущего прохода,Измерение и запоминание текущего значения напряженности осущсствляют непрерывно в функции пути. На фнг. 1 показана траектория движения агрегата при обработке почвы челноком; на фиг. 2 - структурная схема системы автовождения, реализующей предлагаемый способ.Система автовождсния сельскохозяйственного агрегата 1 включает: удаленный проводник 2 с током, приемные антенны 3, 4; коммутатор 5; запоминающее устройство 6; схемусравнения; регулятор 8 направления движения.Обрабатываемый участок поля ограничен поворотными полосами 9 и 10. Электромагнитное поле создается током удаленного проводника 2. В процессе обработки почвы каждьш проход агрегата 1 (например, трактора с сеялкой) смещается относительно предыдущего вправо (по чертежу) на ширину захвата агрегата, На агрегате 1 установлены приемные антенны 3 и 4 таким образом, что их траектория совпадает с траекториями крайних (слева и справа) рабочих органов агрегатируемой машины. Выходы антенн 3 и 4 через коммутатор 5 соединены со входами запоминающего устройства 6 схемы 7 сравнения, второй вход которой соединен с выходом запоминающего устройства 6. Выход схемы 7 сравнения соединен со входом регулятора 8 направления движения, управляющим рулевым механизмом агрегата 1. При обработке почвы челноком коммутатор 5 переключается в противоположное состояние после каждого разворота агрегата 1.Способ осуществляется следующим образом.Пусть агрегат 1 перемещается от поворотной полосы 10 к полосе 9, при этом траектория перемсщения его антенны 4 совпадает с линией 11, являющейся границей между обрабатываемым и необработанным участками почвы. Если коммутатор 5 находится в положении, показанном на фиг, 2, то выходное напряжение антенны 4, соответствующее напряженности электромагнитного поля вдоль линии 11, будет запоминаться в функции пути в запоминающем устройстве 6. Если этот проход агрегата 1 является первым, то вождение агрегата может осуществляться водителем.Когда агрегат 1 достигнет поворотной полосы 9, то в запоминающем устройстве 6 системы автовождения будет находиться программа следующего прохода, запомненная в виде электрического сипгала, пропорционального напряженности электромаппп 10 15 20 25 30 35 40 45 50 55 ного поля вдоль линии 11 между обработанным и необработанным участками почвы, поэтому даьнейшее вождение агрегата может осуществляться автоматически, Для этого необходимо после разворота агрегата па поворотной полосе 9 переключить коммутатор 5 в нижнес по схеме) положение. В результате этого на вход схемы 7 сравнения будет поступать выходное напряжение антенны 4, соответствующее напряженности электромагнитного поля в фактическом месте нахождения агрегата, а с выхода запоминающего устройства 6 - выходное напряжение этой же антенны, соответствующее напряженности электромагнитного поля в требуемом месте нахождения агрегата. Если ошибка автовожденпя отсутствует и антенна 4 расположена над линией 11, то на вход схемы 7 сравнения будут поступать одинаковые напряжения, и сигнал на выходе схемы сравнения будет отсутствовать, Если же агрегат отклонится в ту или другую сторону, то антенна 4 сместится с линии 11, и на вход схемы 7 сравнения будут поступать разные напряжения, На выходе схемы 7 сравнения появится сшнал ошибки автовожденпя, поступающий на вход регулятора 8. При этом срабатывает исполнительный механизм рулевого управления, и агрегат возвращается в требуемое положение.Одновременно с этим на вход запоминающего устройства 6 будет поступать выходное напряжение антенны 3, перемещающейся вдоль вновь образуемой линии 12 между обработанным и необработанным участками почвы. Запоминание этого напряжения обеспечивает формирование управляющего сигнала после достижения агрегатом поворотной полосы 10 и возвращения коммутатора 5 в исходное положение, Поочередное переключение коммутатора 5 после каждого разворота агрегата и запоминание выходного напряжения внешней антенны обеспечивает последовательное смещение каждого следующего прохода агрегата относительно предыдущего на ширину захвата агрегата, а также формирование сигнала ошибки автовождения.Применение данного способа обеспечивает повышение слитности проходов и обеспечивает возможность создания на его основе универсальной системы автовождепия сельскохозяйственных агрегатов. Формула изобретения 1. Способ программирования траектории движения сельскохозяйственных агрегатов, заключающийся в предварительном создании в окружающем пространстве электромагнитного поля, определении и запоминании напряженности электромапгитного поля вдоль требуемой траектории движения,751343 71ч- , - , -- вг(Я 7 гГ Г Ы.ОГй ,ос),ул,г,Г СоставительРедактор Н. Спиридонова Тскред Винокур ф еряков корректоры: Л. Слепая и Р. Беркович.О 1 оиск; Государственного комитета СССР по делам пзобретсний и открытий113035, й 1 осква, 7 К, Раушская наб., д. 4(5 ипография, пр, Сапунова,отличающийся тем, что, с целью повышения слитности смежных проходов, определение напряженности для каждого последующего прохода осуществляют путем се непосредственного измерения во время предыдущего прохода,2. Способ по и, 1, отл и ч а ю щ и й с я тем, что измерение и запоминание текущего значения напряженности осущсствляют непрерывно в функции пути. Источники информации,принятые во внимание прп экспертизе1. Литинский С. Л. Первый опыт и перспективы автоматизации вождения тракторных агрегатов. М., 1960.2. Драновский Л. И. и др. Основы построения пндукцпоппь 1 х систем автоматического вождения тракторов по эквидпстантным линиям. М., Тр. НЛТИ, нып,219,1 Ю 1972
СмотретьЗаявка
2341318, 22.03.1976
СИБИРСКИЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ МЕХАНИЗАЦИИ И ЭЛЕКТРИФИКАЦИИ СЕЛЬСКОГО ХОЗЯЙСТВА
КАЛЮЖНЫЙ АНАТОЛИЙ ТИМОФЕЕВИЧ
МПК / Метки
МПК: A01B 69/04
Метки: агрегатов, движения, программирования, сельскохозяйственных, траектории
Опубликовано: 30.07.1980
Код ссылки
<a href="https://patents.su/3-751343-sposob-programmirovaniya-traektorii-dvizheniya-selskokhozyajjstvennykh-agregatov.html" target="_blank" rel="follow" title="База патентов СССР">Способ программирования траектории движения сельскохозяйственных агрегатов</a>
Способ обеспечения прямолинейности движения тракторного агрегата

Номер патента: 1667661
Опубликовано: 07.08.1991
Авторы: Манабаев, Тешабаев, Тукубаев
МПК: A01B 69/04
Метки: агрегата, движения, обеспечения, прямолинейности, тракторного
...изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина, 101 Изобретение относится к сельскохозяйственному машиностроению, в частности к способам вождения тракторных агрегатов,Цель изобретения - снижение трудоемкости настройки лазерного излучателя.На чертеже показано расположение лазерного излучателя, отражающих реперов и схема движения тракторного агрегата.Способ обеспечения прямолинейности движения тракторного агрегата заключает- "0 ся в том, что излучатель 1 устанавливают на краю поля 2 под углом к направлению движения тракторного агрегата 3, а угол установки реперов 4 выбирают в соответствии с направлением отраженных лучей 5 вдоль...
Способ обеспечения прямолинейности движения тракторного агрегата

Номер патента: 1360614
Опубликовано: 23.12.1987
МПК: A01B 69/04
Метки: агрегата, движения, обеспечения, прямолинейности, тракторного
...Раушскаяпредприятие, г. Редактор Л. ГратиЗаказ 5769/111 ИИПИ Государ1130Производственно. зло и изобретений и открытинаб., д. 4/5Ужгород, ул. Проектная,гвенного кокните5, Москва, Ж -олиграфическое 1Изобретение относится к сельскому хозяйству, в частности к способам вождения тракторных агрегатов.Цель изобретения - снижение повреждаемости растений при междурядной обра ботке почвы путем повышения точности вождения агрегата.На фиг. 1 показана схема взаимного расположения лазера и тракторного агрегата; на фиг. 2 - схема движения тракторного агрегата.Способ обеспечения прямолинейности движения тракторного агрегата заключается в том, что по краю поля устанавливают реперы, расстояние между которыми задают, исходя из ширины междурядий и 15...
Способ измерения скорости движения тракторного агрегата

Номер патента: 1411399
Опубликовано: 23.07.1988
Авторы: Злотник, Козюков, Лазарев, Федоров
МПК: E02F 9/20
Метки: агрегата, движения, скорости, тракторного
...3, ориентированный в направлении, перпендикулярном направлениюдвижения, основной 4 и дополнительной5 усилители и вычислительно-преобразующая система 6, на выходе которой 45Формируется сигнал действительнойскорости трактора,При движении трактора по горизонтальной поверхности вектор скоростив направлении, параллельном этой поверхности, определяется (фиг.1) извыражения1Ч = 7сов(где 7 ц - вектор измеряемой скорости;Ы - угол ориентации и приемникаультразвуковых колебаний относительно поверхности. Частота колебанйй, отраженных отповерхности волн, согласно эффектуДопплера равна( Чг соМ)нлигде Гн - несущая частота источникаультразвуковых колебаний;Чз - скорость распространенияультразвуковых колебанийв воздушной сфере.Из последнего выражения...
Способ управления движением мобильного агрегата

Номер патента: 1477272
Опубликовано: 07.05.1989
МПК: A01B 69/04
Метки: агрегата, движением, мобильного
...7 на ФПУ 13 и приходом на ФПУ 11, а также 1 - между приходами луча 7 на ФПУ 11 и ФПУ 13. Допустим световой луч 7 вращают против часовой стрелки, Агрегат движется вправо от точки 12, Сначала луч 7 пересекает ФПУ 13, которое вырабатывает сигнал 15 и направляет его на устройство 14 измерения интервалов времени. При попадании светового луча на ФПУ 11 оно вырабатывает сигнал 16, который поступает на другой вход устройства 14. В устройстве 14 проводят измерение временных интервалов между соседними импульсами 15 и 16, а также следующим импульсом 15. Данные о длительностях этих интервалов в цифровом (или аналоговом) виде поступают в вычислитель 17. В этом устройстве временные интервалы т и 1 сравнивают между собой и выявляют меньший - т. После...
Устройство для стабилизации прямолинейного движения машинотракторного агрегата

Номер патента: 545279
Опубликовано: 05.02.1977
Автор: Карабаки
МПК: A01B 65/00
Метки: агрегата, движения, машинотракторного, прямолинейного, стабилизации
...задней нижней стенке кожуха заднего моста, т. е. остова трактора или рамы сельхозорудя, з горизонтальной плоскости, на двух залах 1 и 2 посажены входящие в зацепление шестерни 8 и 4 одинакового диаметра. На каждо нз этих шестерен жестко закреплены влк б и б с дисковыми ножами 7 8, которые при двих(ени трактора заглубляются в гочву на определенную глубину.Дополнительные нох(и вместе с поддерживающими вилкам б и б и шестернями 3 и 4 могут вращаться в известных пределах вокруг залов 1 2. Поворот шестерней происходит при смещении продольной оси трактора на угол, отличающийся от заданного направления движения. При этом одинножей 7 л 8 на ходу трактора устанавливается параллельно заданному направлению дзжения (з данном случае дисковый нож 7),...
Предыдущий патент: Тракторная сцепка
Следующий патент: Устройство для автоматического группового вождения тракторных агрегатов
Случайный патент: Статический преобразователь с блоком импульсного перевозбуждения для питания гистерезисного электродвигателя