Исполнительный механизм микроперемещений
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
(51) .6 05 О 3/О НОЕ ГОСУДАРСТВЕННОЕ ПАТВЕДОМСТВО СССР(ГОСПАТЕНТ СССР) ИЗ НИЯ 2 етельство СС3/00, 1987. ельный механизм остоящий из элекнительного устройопакетом и блока ми известного устнейность статиче- нестабильность ОРСКОМУ СВИДЕТЕЛЬСТВ(71) Московский институт приборостроения(56) 1. Шачнев Ю.А, Автоматическое управ-ление точностью обработки при помощипьеэокерамических исполнительных меха-низмов. - Технология производства. научная организация труда и управления. 1979,М б, а. 18-20,2. Авторское саид СРМ 1427336, кл, 6 05 О(57) Изобретение относится к средствам автоматики и может использоваться для регулирования и поднастройкиположения подвижных звеньев технологических и приборных систем. Исполнительный механизм микроперемещений содержит электромеханическое исполнительное устройство и блок управленияЗлектромеханическое испол- нительное устройство выполнено в виде ус- тановленного в корпусе пьеэопакета с подвижным штоком и соосным ему датчи ком положения подвижного штока. ПьезоПредложенное устройство относится к средствам автоматики и может использоваться в качестве исполнительного механизма высокоточных микроперемещений для регулирования и поднастройки положе- ниР подвижных звеньев технологических и приборных си:тем,1784949 А 1 пакет составлен из отдельных секций многослойных пьезоэлементов, изолированных друг от друга с помощью прокладок и снабженных датчиками положения отсчетной поверхности секции относительно ее базовой поверхности. Первая секция пьезоэлементов входит в основной контур регулирования положения подвижного штока и работает по сигналу ошибки между задающим воздействием и сигналом обратной связи с датчика положения подвижного штока, Вторая и последующие секции пьезоэлементов образуют корректирующие контуры регулирования и служат для повышения качества регулирования основного контура, причем каждая последующая секция работает по сигналу ошибки положения отсчетной поверхности предыдущей секции пьезоэлементов. Для формирования кор- ректирующих воздействий блок управления оснащен дополнительными дифференциальными и высоковольтными усилителями, Благодаря корректирующему действию вспомогательных секций пьезоэлементов значительно повышается запас устойчивости, а также статическая и динамическая точность регулирования положения подвижного штока основным контуром регу- лирования Известен исполнит икроперемещений (1), с ромеханического испол тва, оснащенного пьез правления. Недостатка ойства являются нели кой характеристики имикроперемещений из-за гистерезиса и ползучести пьеэокерамики, а также влияния инструментальных и внешних факторов:Наиболее близким к изобретению техническим решением, выбранным, в качестве прототипа, является задатчик микроперемещений 2), в котором для повышения линейности и стабильности использован датчик положения подвижного штока задатчика, конструктивно встроенный в электромехани 1 еское исполнйтельное устройство. При этом управляющее напряжение на пьезопакет формируется пропорционально сигналу ошибки между задающим сигналом и сигналом с датчика положения подвижного штока. Для получения высокой линейно сти и стабильности необходимо, чтобы коэффициент усиления разомкнутой цепи задатчикэ микроперемещений составлял 40 - 69 дБ, Однако увеличение коэффициента усиления до требуемых значений связано со значительными трудностями обеспечения устойчивости и качества переходного процесса. Последнее объясняется тем, что основные инерционные звенья задатчика имеют примерно одинаковые постоянные времени, причем пьезопакет с подвимным штоком образует колебательное звено с большим значением показателя колебательности частотной характеристики. Дополнительное запаздывание в системе обусловлено также гистерезисной характеристикой пьезопакета, Таким образом, получение требуемых значений коэффициента усиления возможно лишь в области низких частот, что ограничивает частотный диапазон регулирования, Введение же воздействия по производной хотя и расширяет частотный диапазон регулирования, однако значительно снижает запас устойчивости.Целью настоя щего изобретения я вляется повышение статической и динамической точности регулирования положения подвйжного штока исполнительного механизма микроперемещений.Сущность изобретения заключается в следующем, Исполнительный механизм микроперемещений содержит электромеханическое исполнительное устройство, выполненное в виде установленного в корпусе пьезопакета с подвижным штоком или соосным ему датчиком положения подвижного штока, а также блок управления, включающий задатчик перемещения подвижного штока, дифференциальный усилитель сигнала ошибки положения подвижного штока, подключенный первым входом к выходу задатчика перемещения подвижного штока, высоковольтный усилитель напряжения, вход которого подключен к выходу дифференциального усилителя сигнала ошибкиположения подвижного штока, и измерительный преобразователь, связанный с датчиком положения подвижного штока и5 подключенный выходом ко второму входудифференциального усилителя сигналаошибки положения подвижного штока,Поставленная цель изобретения достигается тем. что пьезопакет выполнен в виде10 набора отдельных секций из многослойнойпьеэокерамики, установленных последовательно и изолированных друг от друга с помощью прокладок, Каждая секцияпьезопакета, кроме последней, снабжена15 датчиком положения отсчетной поверхно. сти секции относительно ее базовой поверхности, для чего неподвижный чувствительный элемент датчиков положения закреплен в основании секции, а подвижный чув 20 ствительный элемент закреплен напрокладке, установленной на отсчетной поверхности секции, При этом выход высоковольтного усилителя напряженияподключен к обкладкам пьезоэлементов25 первой секции пьезопакета, Таким образом,.первая секция пьезопакета входит в основной контур регулирования положения подвижного штока и работает по ошибкемежду задающим воздействием и сигналом30 с датчика положения подвижного штока.,Вторая и последующие секции пьеэопакетаслужат для повышения качества регулиро вания основного контура,Для этого блок управления оснащен до 35 полнительными измерительными преобразователями, каждый иэ которых связан сдатчиком положения отсчетной поверхности соответствующей секции, т.е. первыйдополнительный измерительный преобра 40 эователь связан с датчиком положения Отсчетной поверхности первой секции. второйдополнительный .измерительный преобразователь - . с датчиком положения второйсекции и так далее. Кроме того, блок управ 45 ления оснащен дополнительными дифференциальными усилителями, к выходукаждого из которых подключен дополнительный высоковольтный усилитель напряжения, причем выход первого дополнитель 50 ного высоковольтногоусилителя подключенк обкладкам пьезоэлементов, второй секции,выход второго дополнительного высоко.вольтного усилителя - к обкладкам пьезоэлементов третьей секции и т,д, с55 подключением последнего дополнительноговысоковольтного усилителя к обкладкампьезоэлементов последней секции пьеэопакета, Первый вход первого дополнительногодифференциального усилителя подключен к выходу измерительного преобразователяпервой секции, а второй вход этого усилителя подключен к выходу дифференциального усилителя сигнала ошибки положения подвижного штока в основном контуре регулирования, Таким образом, на выходе первого .дополнительного дифференциального усилителя формируется сигнал ошибки первой секции, который отрабатывается пьезоэлементами второй секции, Второй дополнительный дифференциальный усилитель связан своими входами соответственно с выходом измерительного преобразователя второй секции и выходом первого дополнительного дифференциального усилителя. На его выходе формируется сигнал ошибки положения второй секции, который подается и отрабатывается пьезоэлементами третьей секции, Каждый последующий дополнительный дифференциальный усилитель формирует сигнал ошибки соответствующей секции, который отрабатывается пьезоэлементамиследующей секции, Пьезоэлементы последней секции отрабатывают сигнал ошибки предпоследней секции.Повышение статической точности регулирования положения подвижного штока исполнительного механизма связано с тем, что частичная линеаризация и стабилизация характеристик элементов исполнительного тракта основного контура регулирования (высоковольтный усилитель напряжения - первая секция пьезопакета) достигается корректирующим действием второй секции пьезопакета, работающей по ошибке положения первой секции, В свою очередь, ошибки положения второй секции корректируются с помощью третьей секции, Так как максимальная ошибка каждой секции иэ-за нелинейности и нестабильности составляет порядка О,ЗЯ (30%), где Я - диапазон перемещений, то при наличии одной основной и одной корректирующей секции суммарная ошибка будет составлять уже 0,3 (О,ЗЯ)=0,09 (9%), в случае двух корректирующих секций 0,3(0,093)=0,027 (2,7%), в общемПслучае уо = П ь где у; - приведенная по.=1грешность секции, уо - приведенная погрешность пьезопакета. Благодаря корректирующему действию вспомогательных секций коэффициент усиления разомкнутой цепи основногоконтура регулирования может быть значительно уменьшен, в частности для трехсекционного пьезопакета (один основной - два корректирующих) более чем в 10 раз. Это не только повышает запас устойчивости, но и улучшает качество переходного процессаснижение перерегулирования). Повышение динамической точности регулирования связано с тем, что наличие корректирующих секций обеспечивает, во-первых. частичную компенсацию инерционности, обусловлен-. ной емкостными свойствами пьезоэлементов (подьем АЧХ разомкнутой цепи основного контура регулирования), и, вовторых, уменьшение фазового сдвига из-за гистеризиса и влияния инерционности элементов. Это позволяет расширить частотный диапазон исполнительного механизма, уменьшить время переходного процесса без увеличения коэффициента усиления разомкнутой цепи основного контура регули 10 15 рования.. На чертеже показан пример выполнения исполнительного механизма микроперемещений с трехсекционным пьезопакетом,20 Он состоит из электромеханического исполнительного устройства и блока управления, Электромеханическое исполнительное устройство содержит трехсекционный пьезопакет, включающий первую 1, вторую 2 и третью 3 секции пьезоэлементов, изолированных между собой прокладками 4 и 5, подвижный шток 6, датчик положения 7 подвижного штока, датчики положения 8, 9 30 отсчетной поверхности первой и второй секций соответственно, а также элементы корпуса 10. Блокуправления включаетзадатчик перемещения 11 подвижного штока, измерительный преобразователь 12 сигнала с датчика положения подвижного штока, измерительные преобразователи 13, 14 сигналов с датчиков полокения отсчетной поверхности первой и второй секций пьезоэлементов соответственно, дифференциальный усилитель 15 сигнала ошибки 40 положения подвижного штока. дифференциальные усилители 16 и 17 сигналов ошибпервой и второй секций соответственно, высоковольтные усилители напряжения 18, 19 50 и 20 для каждой из секций пьезопакета,Исполнительный механизм микроперемещений работает следующим образом,Требуемое перемещение подвижного штока б задается с помощью задатчика 11, подключенного к одному из входов дифферециал ь ного усилителя 15. На второй входдифференциал ьно го усилителя .1 5 поступает сигнал измерительной информации с датчика положения подвижного штока 6, преобразованный измерительным преобразователем 12, В результате сравнения задающего и выходного сигналов на выходедифференциального усилителя 15 формируется сигнал ошибки положения подвижного 52535ки положения отсчетной поверхностиштока, который усиливается высоковольтным усилителем напряжения 18 и отрабатывается пьезоэлементами первой секции пьезопакета. Так работает основной контур регулирования положения подвижного штока. Вторая и третья секции пьезопакета служатдля повыцения качества регулирования основного контура, Последнее достигается использованием установленных в первой и второй секциях датчиков положения отсчетных поверхностей этих секций 8 и 9. Сигнал измерительной информации с датчика положенияотсчетной поверхности первой сек ции 8 после преобразования измерительным преобразователем 13 поступает на один из входов дифференциального усилителя 16, на второй вход которого поступает выходной сигнал с дифференциального усилителя 15, явлгцощийся задающим сигналом для первой секции, На выходе дифференциального усилителя 1 б формируется сигнал ошибки положения отсчетной поверхности первой секции. который после усиления высоковольтным усилителем 19 подается для отработки на пьезоэлементы второй секции, В свою очередь, сигнал ошибки положения отсчетной поверхности второй секции, формируемый с помощью датчика положения 9, измерительного преобразователя 14 и дифференциального усилителя 17, подключенного одним из входоо к оыходу дифференциального усилителя 16. поступает для отработки на высоковольтный усили тель 20 и далее на пьезоэлементы третьей секции,Благодаря корректирующему действию пьезоэлементов оторой и третьей секций значительно повышается запас устойчивости, а также статическая и динамическая точность регулирования положения подвикного штока основным контуром регулирования.Фо р м у л а и з о б р ет е н и я ЙсЬолнительный механизм микроперемещений, содержащий электромеханическое исполнительное устройство, выполненное в виде установленного о корпусе пьезопакета с подвижным штоком и соосным ему датчиком положения подвижного штока, а также блок управления, включающий задатчик перемещения подвижного.штОка, дифференциальный усилитель сиг-.нала ошибки положения подвикного штока.подключенный первым. входом к выходу за 10 датчика перемещения подвижного штока, высоковольтный усилитель напряжения, вход которого подключен к выходу дифференциального усилителя сигнала ошибки полокения подвижного штока, и измерительный преобразователь, связанный с датчиком положения подвижного штока и подключенный оыходом к второму входу дифференциального усилителя сигналаошибки положения подвижного штока, о тл и ч а и щ и й с я тем, что, с целью повышения статической и динамической точности, пьезопакет выполнен в виде набора отдельных секций из многослойной пьезокерами ки, установленных последовательно иизолированных друг от друга с помощью прокладок причем каждая секция пьезопакета, кроме последней, снабжена датчиком полокения отсчетной поверхности секции 20 относительно ее базовой поверхности, причем неподвижный чувствительный элемент датчиков положения отсчетной поверхности секции закреплен на прокладке о основании секции, а подвижный чувствйтельный эле мент закреплен на прокладке, установленной на отсчетной поверхности секции, блок управления оснащен дополнительными измерительными преобразователями, каждый из которых связан с датчиком полокения 30 отсчетной поверхности соотоетствующейсекции, дополнительными дифференциальными усилителями, первый вход каждого из которых соединенс оыходом соответстоующего дополнительного измерительного пре образооателя, дополнительными высоковольтными усилителями напряжения, каждый из которых подключен входом к выходу соответствующего дополнительного дифференциального усилителя, выход высоковольтного усилителя напряжения подключен к обкладкам пьезоэлементов первой секции пьезопакета, выход каждогодополнительного высоковольтного усилителя напряжения подключен к обкладкам пье зоэлементов каждой последующей секциипьезопакета, второй вход первого дополнительного дифференциального усилителя подключен к выходу дифференциальногоусилителя сигнала ошибки положения подоижного штока, второй вход каждого последующего дополнительного дифференциального усилителя подключен к выходу предыдущего дополнительного дифференциального усилителя.1784949 Составитель Ю.НиколаевТехред М,Моргентал Редактор Т.Орловская Рректор О.Юрковецка роиэводственно-иэдательский комбинат "Патент", г, Ужго л.Гагарин Закаэ 4364 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ ССС 113035, Москва, ЖРаушская наб 4/5
СмотретьЗаявка
4846163, 02.07.1990
МОСКОВСКИЙ ИНСТИТУТ ПРИБОРОСТРОЕНИЯ
НИКОЛАЕВ ЮРИЙ ЛЬВОВИЧ, ЕРШОВ АЛЕКСАНДР ГРИГОРЬЕВИЧ, САПРЫКИН ВЛАДИМИР МИХАЙЛОВИЧ, ВИШНЕКОВ АЛЕКСЕЙ ВЛАДЛЕНОВИЧ
МПК / Метки
МПК: G05D 3/00
Метки: исполнительный, механизм, микроперемещений
Опубликовано: 30.12.1992
Код ссылки
<a href="https://patents.su/5-1784949-ispolnitelnyjj-mekhanizm-mikroperemeshhenijj.html" target="_blank" rel="follow" title="База патентов СССР">Исполнительный механизм микроперемещений</a>
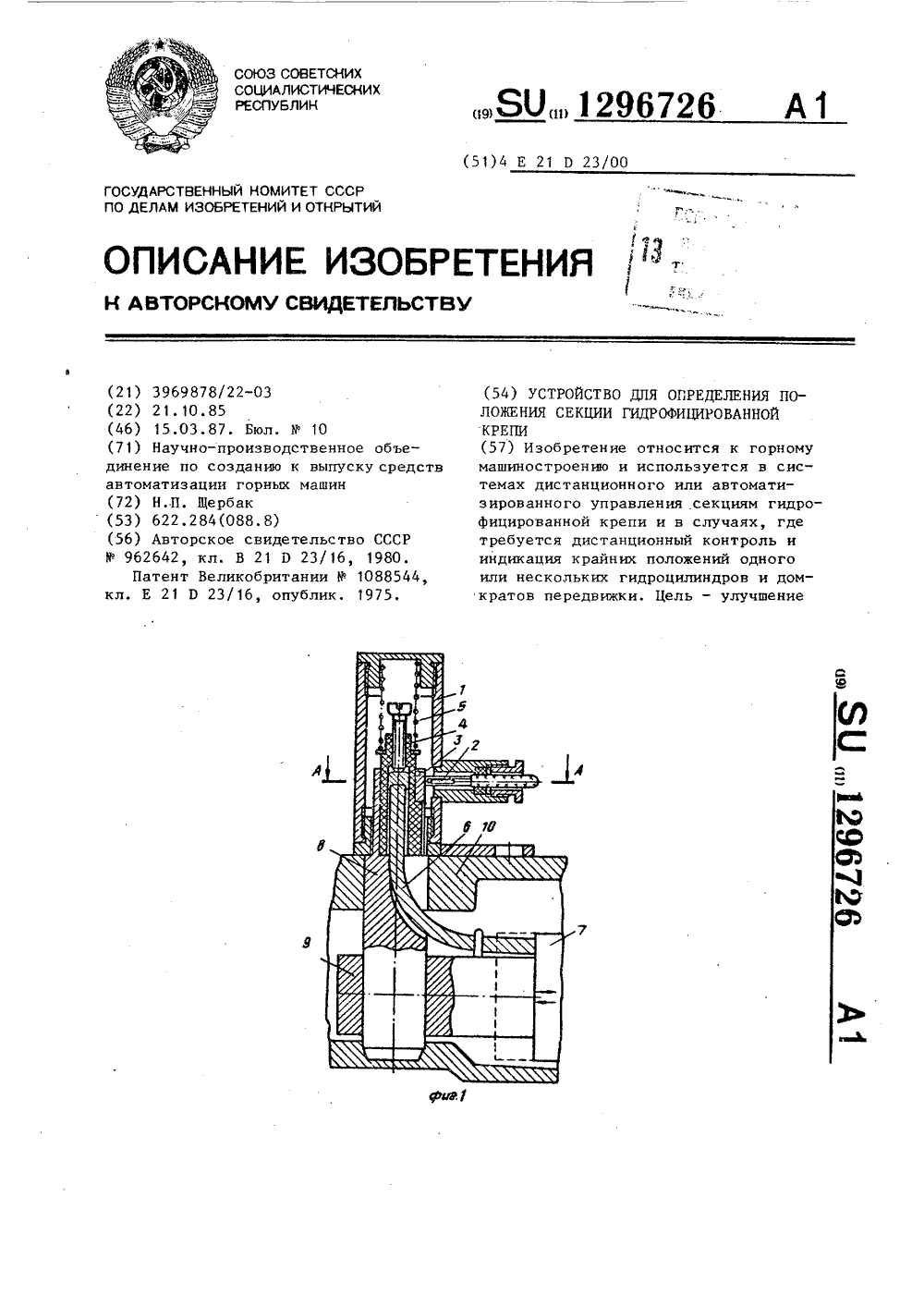
Устройство для определения положения секции гидрофицированной крепи
Номер патента: 1296726
Опубликовано: 15.03.1987
Автор: Щербак
МПК: E21D 23/00
Метки: гидрофицированной, крепи, положения, секции
...4 и магнита 3 выходитиз зоны действия магнитного потокаи подает сигнал на пульт управленияо конечном положении секции. 2 ил. 2домкрата передвижки, второй конецразмещен в недвижной направляющей 4.Средняя часть передаточного узла 6расположена в пазу пальца 8, жесткоприкрепленного к неподвижному узлу9 гидрюдомкрата, перпендикулярноего оси. Палец 8 установлен также восновании 10 секции крепи. К основанию 10 секции крепи прикреплен кор 10 пус 1 устройства с подвижной направляющей 4 и,.магнитоуправляемым герконом 2,Передаточный узел может быть выполнен в виде отрезка стального ка 15 ната, обладающего малой поперечнойи высокой продольной жидкостью.Подвижный узел 7 гидродомкратапередвижки может быть либо гидроцилиндром, как показано...
Устройство для удержания в сдвинутом положении секций телескопической вышки

Номер патента: 219496
Опубликовано: 01.01.1968
Авторы: Научно, Рубинштейн, Хмызников
МПК: E21B 15/00, E21B 7/02
Метки: вышки, положении, сдвинутом, секций, телескопической, удержания
...закрепленногоной секции вышки.2, Устройство по п. 1,что криволинейная поверобразована дугой окружиоси поворота вышки. 10 показано устройышки в транспортНа чертеже схематичнство в момент переводаное положение.Устройство содержит крленный на раме 2, тележ отличающееся тем, хи ость кронштейна ости с центром на нштейн 1, установ уЗ и ролик 4, за Известны устроиства для удержания в сдвинутом положении секций телескопической ьышки, выполненные в виде болтов и планок. Основным недостатком таких устройств является то, что выдвижные секции вышки стопорятся вручнуюПредложенное устройство отличается от известных тем, что оно выполнено в виде установленного на несущей раме кронштейна с криволинейной поверхностью и взаимодействующего с ней при...
Устройство для дистанционного управления перемещением секций шахтной гидрокрепи

Номер патента: 1233200
Опубликовано: 23.05.1986
Авторы: Балакерский, Коломийцев, Лещинский
МПК: G08C 19/16
Метки: гидрокрепи, дистанционного, перемещением, секций, шахтной
...осуществляет кольцевой счет и СС 7 в том же, что и он направлении, ь -1, п, 2,1, , г -1 Опрос объектов контролируемого пункта благодаря быстродействию системы происходит с частотой 1 кГц. Причем при каждом совпадении номера (ячейки 19), введенного в память реверсивного регистра 8 и СС 7, элемент И 9 посылает сигнал отсчета в счетчик 10 циклов контроля. Осуществив нормированное число циклов контроля, выбор останавливается на секции, номер которой заложен в память реверсивного ре.гистра 8. В процессе осуществления циклов контроля при прохождении концевой ячейки 21 элемент включения концевой ячейки распределенного переключателя 15 посыпает сигнал в узел 11 контроля синхронизации. Туда же поступает сигнал, соответствующий...
Способ автоматического контроля положения секции механизированной крепи

Номер патента: 1756556
Опубликовано: 23.08.1992
Авторы: Биенко, Ермоленко, Новиков
МПК: E21C 35/24
Метки: крепи, механизированной, положения, секции
...в проводнике. Так как в качестве обратной ветви токонесущего проводника используют металлические части комплекса, то в первом приближении можно считать, что поле в пространстве между токонесущим проводником и частями комплекса, включал элементы крепи, аналогично полю коэксиэльного кабеля, Таким образом, например.уменьшение рэсстояния между прямым и обрэтным проводниками вызывает увеличение напряженности поля в точке измерения, находящейся нэ фиксированном расстоянии от прямого проводника. Причем, как было установлено экспериментэльно, эта зависимость имеет вид, близкий к линейной. Измеряя напряженность поля в двух точках и обрабатывая полученные сигналы по следу 1 ощему алгоритму, можно исключить указанное выше измЕнение величины поля...
Устройство управления положением антенны для подвижного объекта

Номер патента: 1146614
Опубликовано: 23.03.1985
Авторы: Жигулин, Фролов, Ягунов
МПК: G01S 3/04
Метки: антенны, объекта, подвижного, положением
...тем, что в устройстве управления положением антенны для подвижного объекта, содер жащем антенну, привод антенны поазимуту, привод антенны по углу места, эадатчик азимута, задатчик угла места, датчик продольного угла наклона объекта, выполненный в виде первого синусно"косинусного трансФорматора (СКТ), датчик поперечногоугла наклона объекта, выполненныйв виде второго СКТ, приемник, выполненный в виде третьего СКТ, четвертый СКТ, пятый СКТ и усилитель, причем выход эадатчика азимута соединен с входом привода антенны по азймуту, выходной вал которого соединен с валом управления антенны по азимуту и с валом ротора четвертого СКТ, синусная и косинусная обмотки статора которого соединены с синус- ными обмотками соответственно второго и...
Предыдущий патент: Устройство программного управления индукционным нагревом
Следующий патент: Устройство для регулирования уровня жидкости
Случайный патент: Полимерная композиция фрикционного назначения