Система оптимального управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 618721
Авторы: Гулько, Игнатенко, Кондрашова
Текст
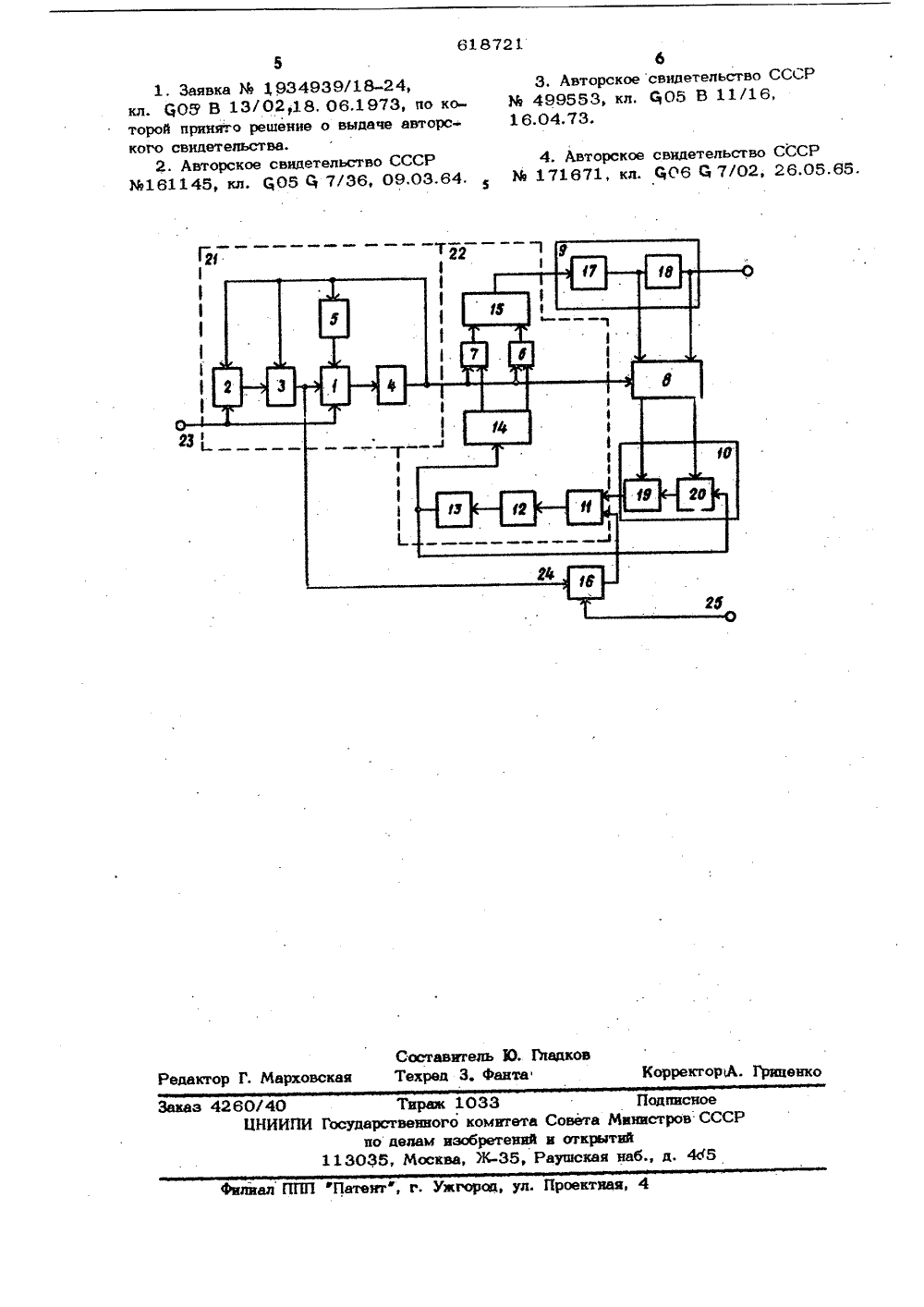
фр 5 лнотекэ, Ц 5 з Союз СоветскихСоциалистическихРеспублик ОП ИКАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДВТВДЬСТВУ(11) 618721 61) Дополнительное к авт. сви 2) Заявлено 16.02.76(21) 2323667/18- 3 51) М. К В 13/О присоединением заявки , -Государственный комитет Совета Министров СССР оо делам изобретений и открытий(53) ллетень 29 5) Дата опубликования описания 30.06.7 2) Авторы изобретен и. Н, Игнатенко, Ф Гулько и Н. В. Кондра Киевский ордена Ленина политехнический им, 50.летия ВеликойОктябрьской социреволюции(54) СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ влеот 5 Изобретение касается систем упрання летательными аппаратами, металлрежущими станками и т.п.,Известна система оптимального уп -равления, содержащая блок синтеза управляющего воздействия и моделирующийблок. 1 23 н Я ,Эти системы используются для оптюмального управления либо при отсутствии задающих воздействий, либо при ихпостоянном заданном уровне, что исключает возможность применения их приизменякяцихся во времени входных воздействиях.Наиболее близкой по технической суньности к изобретению является системаоптимального управления, содержащаязадатчик, последовательно соединенныепервый счетчик, к первому входу которого подключен генератор тактовых импульсов., и дешиФратор, выход которого соединен с первым входом блока управлениямоделью и первыми входами элементовИ, вторые входы которых соединены ссоответствующими входамн инвертора, а выходы - с соответствующими входами триггера, выход которого подключен ко входуобъекта, выходы которого подключены,соответственно ко второму и третьемувходам блока управления моделью, выходы которого соединены с соответствующими входами модели объекта 41,Однако эта система не обеспечиваеттребуемой точности при введении задающего воздействия,Целью изобретения является повышение точности системы.Для этого в системе установлены последовательно соединенные второй счетчик и блок перезаписи кода, и последовательно соединенные первый и второйФункциональные преобразователи и релейный блок, выход которого соединен совходом инвертора и третьим входом модели объекта, выход дещифратора соединен со входом генератора тактовых импульсов, вторым входом блока перезаписи кода и первым входом второго счетчика, второй вход которого подключенко второму входу первого счетчика, третий вход которого подключен к выходу блока перезаписи кода и входу задатчика, выход которого соединен с первым входом первого функционального преобразователя, второй вход которого соединен с выходом модели объекта.На чертеже изображена структурная схема системы.Предложенная система содержит первый и второй счетчики 1,2, блок 3 перезаписи кода, дешифратор 4, генератор 5 тактовых импульсов, первый и второй)элементы И 67 блок 8 управления моделью, объект 9, модель объекта 10, первый и второй функциональные преобразователи 11,12, репейный блок 13, иивертор 14, триггер 15, эадатчик 16, динамические звенья 17,18, входящие в состав объекта, динамические звенья 19,20, еходящне в состав модели объекта, блок 21 формирования интервалов времеви, блок 22 формирования сигнала управления, вход записи кода 23.Система работает следующим образом.В счетчик 2, работающий нв вычитание от импульсов дешифратора 4, ко входу записи кода 23 заносится число, соответствующее длине фиксированного интервала оптимизации (О,Т).Одновременно это же число заносится в счетчик 1, работающий на вычитание от генератора 5 тактовых импульсов, Сигнал, появившийся на выходе деаифрвторв 4, фиксирует конец интервала времени работы .модели объекта 10 и посредством блока 8 управления моделью устанавливает на динамических звеньях 19 и 20 модели начальные условия, соответствующие текущему состоянию объекта 9, и нулевые начальные условия-нв функциональные преобразователи 11,12.Одновременно с этим прекращается поступление тактовых импульсов от ге-; нератора 5 тактовых импульсов в счетчик 2, в блок 3 перезаписи кода пе-, реносит код счетчика 2 в счетчик 1 .Процесс рещения повторяется на укороченном нв один такт интервале времени. Функциональные преобразователи 11,12 представляют собой выполненные нв операционных усилителях динамические звенья первого порядка, структурно повторяющие объект 9.Преобразователи 11,12, репейныйблок 13 и ннвертор 14 формируют сигнал оптимального управления.Оптимальные воздействия на объект 10 формируются посредством элементов20 25 30 55 40 45 50 . 55 6,7 и триггера 15 в момент окончания очередного интервала работы "быстрой модели, т.е, в момент появления сигнала на выходе дещнфраторо 4, и поддерживается таковым до окончания следующего за ним интервала решения.Управляемый задатчнк 16 многократно генерирует сигнал 1 () на интервале решения модели на основании программы движении объектаЯ), записанной в звдатчике по входу 24, При этом от блока 3 перезаписи кода каждый раз в начале такта решения по входу 25 в задатчик 16 заносится длина интервала оптимизации, в результате чего задвтчнк 16 формирует сигнал() на укорачивающихся с левого края интервалах Е Ь,Т 1,формула изобретения Система оптимального управления, содержащая эадатчик, последовательно соединенные первый счетчик, к первому входу которого подключен генератор тактовых импульсов, и дешифратор, выход которого соединен с первым входом блока управления моделью и первыми входами элементов И, вторые входы которых соединены с соответствующими входами ннвертора, а выходы 1 с соответствующими входами триггера, выход которого подключен ко входу объекта, выходы которого подключены соответственно ко второму и третьему входам блока управления моделью, выходы которого соединены с соответствующими входами модели объекта, о т л и ч а ющ а я с я тем, что, с целью повышения точности системы, в ней установлены последовательно соединенные второй счетчик и блок перезаписи кода и последовательно соединенные первый и второй функциональные преобразователи и релейный блок, выход которого соединен со входом инвертора и третьим входом модели объекта, выход дешифратора соединен со входом генератора тактовых импульсов, вторым входом блока перезаписи кода и первым входом второго счетчика, второй вход которого подклю. чен ко второму входу первого счетчика, третий вход которого подключен к выходу блока памяти и.входу звдатчикв, выход которого соединен с первым входом первого функционального преобразователя, второй вход которого соединен с выходом модели объекта. Источники информ ани принятые вовнимание при экспертизе:Тираж 1033 Подписноеарственного комитета Совета Министров СССРпо делам изобретений и открытий035, Москва, Ж, Рауаская наб., д. 4 о 5 фПатент, г, Ужгород, ул. Проектная1. Заявка Мф 1934939/18-24,кл. ЯОР В 13/0218. 06,1973, но которой принго решение о выдаче авторского свидетельства,2. Авторское свидетельство СССР М 91611451 кл. С,05 Й 7/361 09,03,64, 63. Авторское свидетельство СССРМ 499553, кл. С 05 В 11/16,1 6,04. 73. 4. Авторское свидетельство СССР Ие 171671, кл. 006 С 7/02, 26.05,65.
СмотретьЗаявка
2323667, 16.02.1976
КИЕВСКИЙ ОРДЕНА ЛЕНИНА ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. 50-ЛЕТИЯ ВЕЛИКОЙ ОКТЯБРЬСКОЙ СОЦИАЛИСТИЧЕСКОЙ РЕВОЛЮЦИИ
ИГНАТЕНКО ВАЛЕРИЙ НИКОЛАЕВИЧ, ГУЛЬКО ФЕЛИКС БОРИСОВИЧ, КОНДРАШОВА НИНА ВЛАДИМИРОВНА
МПК / Метки
МПК: G05B 13/02
Метки: оптимального
Опубликовано: 05.08.1978
Код ссылки
<a href="https://patents.su/3-618721-sistema-optimalnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система оптимального управления</a>
Способ диагностирования объекта, состоящего из последовательно соединенных функциональных блоков, охваченных обратными связями, и устройство для его осуществления

Номер патента: 1667013
Опубликовано: 30.07.1991
МПК: G05B 23/02
Метки: блоков, диагностирования, обратными, объекта, охваченных, последовательно, связями, соединенных, состоящего, функциональных
...устаиов тс" с,Гнь "и", При этОм напряжение на выхсдеГИ2;нбудет убыва Гь 17Где Ч на, НЗПРЯХ(8 ИС О,"ОХ(птеЛЬОГО а - сыщения усилиГеля В; Р - сопротивлен 8 резистора 42; 1 о - в ре м я в о эдей с 1; я сигнала "0". При неодио:.ратном ПОВтОреНИИ СбОЕВ НаПГЯ-"ИИ Иа =.:":Огак ГЛИН 21 (фиГ, ) будет Гропорцнон:.,ь ОЧвых - К 111 - К 2 то, где К 1=1/В 1, Кр=1/В 2. К 1 иК 2 подбираются для каждого ГЛИН, исходяиз статистических данных о числе и продолжительности сбоев, допустимых для блоков1 - 6: 5При каждом отказе блоков 1-6 сигнал"1" с датчиков 7 через элемент ИЛИ 25поступает на управляющий вход блока 22вычисления максимума. Этот сигнал закрывает ключ 33 (фиг. 3), отключая питание от 10конденсатора 31. Конденсатор 31 разряжается через резистор...
Генератор гиперболической функциивремени

Номер патента: 830356
Опубликовано: 15.05.1981
Авторы: Ведерников, Кондаков
МПК: G06F 1/02
Метки: генератор, гиперболической, функциивремени
...триггера 7. Триггер 7, выход которого является выходом 8 40 генератора, подключен вторым входом к входу инвертора б и к выходу блока 3. Вторая группа входов блока 3 соединена с выходами разрядов второго счетчика 2, счетный вход которого является входом 9 синхронизации генератора. Счетный вход счетчика 1 подключен к выходу источника 10 импульсов опорной частоты. Триггер 7 выполнен в виде В 5-триггера, первый и второй входы которого соответственно являются В-входом и 5-входом.Генератор работает следующим образом.Перед началом работы счетчики 1 и 2 обнулены, на выходе блока 3 55 имеется единичный сигнал (коды равны), который подается на второй вход триггера 7. Дешифратср 4 имеет на выходе нулевой сигнал, если код й на выходе счетчика 1 не...
Устройство для вычисления алгебраических выражений

Номер патента: 864298
Опубликовано: 15.09.1981
Авторы: Веденьков, Любезников, Певзнер
МПК: G06G 7/12
Метки: алгебраических, выражений, вычисления
...обратной связи усилителя 5) на выходе усилителя 5. сформируется напряжение, равное (-а О ) .Это напряжение в конце первого этапазапоминается в первой ячейке блока 3.На втором этапе блок 9 управленийвырабатывает сигналы, которые обеспечивают следующий режим: напряжение Ос второго входа устройства через коммутатор 1 подается на сигнальный входделителя 2; выход делителя 2 черезключ 10 подключается к неинвертирующе му входу усилителя 5; выход усилителя 5 через коммутатор 4 подключается к другой, например второй, ячейке блока 3; выход первой ячейки через ключ 13 и резистор 55 12 подключается к инвертирующему входуусилителя 5; с информационного выходаблока 9 код коэф 4 ициента ачерез куль.типлексор 8 подается на управляющийЬЫХ где О , О ,...
Функциональный преобразователь

Номер патента: 960836
Опубликовано: 23.09.1982
Авторы: Рубчинский, Трахтенберг
МПК: G06F 17/10
Метки: функциональный
...поступлении на входы регистра 2кода первого значения аргумента Х дешифратор 4, по старшим разрядам кода аргумента, осуществляют выборку адреса узловой точки соответствующего значения функции (,К) на данном участке аппроксимации, которое поступает из блока 5 памятина входы блока 6, формирующего разностьюкодов(Х)и Х(Хо), поступающую на управляющие входы делителя 8 частоты, вкотором устанавливается соответствующийкоэффициент деления,Младшие разряды кода аргумента Х 2поступают во второй блок 14 вычитания,формирующий разность кодов между входным 2 и буферным 15 регистрами, Разность кодов (Х-Х) с выхода блока 14записывается в вычитаюший счетчик 16, Зйна счетный вход которого поступают импульсы с делителя 18 частоты. Причемкоэффициент...
Вычислительное устройство

Номер патента: 985795
Опубликовано: 30.12.1982
Авторы: Бабаханов, Ибрагимов, Топельберг
МПК: G06G 7/12
Метки: вычислительное
...к шине 1 О ввода второго времяимпульсного сигнала, а выходом - к первому вхо985795 5ду элемента И 12, Второй и третийвходы элемента И 12 соединены соответственно с выходом генератора 8 и сшиной 21 установки механизма нУмножение". Элемент И-НЕ 17 подключен вторым входом к шине 7 ввода первого времяимпульсного сигнала, а выходом - ктретьему входу элемента.И 9,Вычислительное устройство работаетследующим образом. 1 О1. Режим деления времяимпульсныхсигналов.Этот режим задается путем подачиразрешающего потенциала на шину 1 б.При этом импульсы опорной частоты 1 ос выхода генератора 8 проходят черезэлемент И 2 в течение временного интервала Т сигнала, поданного на шину 7 предполагается, что сигнал длительностью Т, поступающий на шину 10...
Предыдущий патент: Устройство для автоматического регулирования
Следующий патент: Регулятор расхода жидкости
Случайный патент: Кожухотрубный теплообменник