Система управления многовальной судовой силовой установкой
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
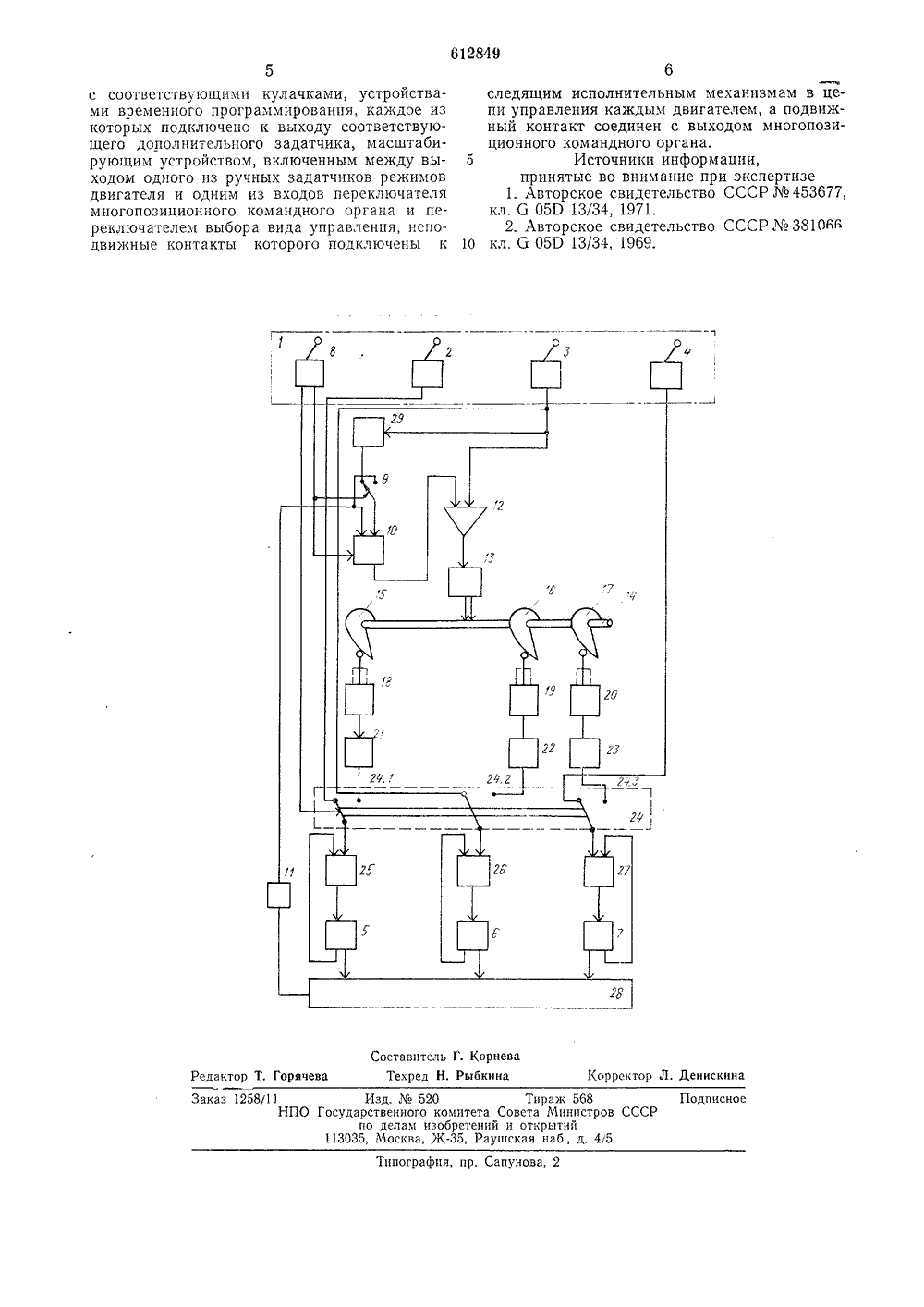
ОПИСАНИЕ ИЗОБРЕТЕНИЯ 1(н) 62849 Союз Советских Социалистических Республик(51) М.Кл.е В 63 Н 2 с присоединением заявкиГосудврстввнныи комитет Совета Министров СССР 23) Приоритет43) Опубликовано 30.06,78. Бюллетень2445) Дата опубликования описания 29,06.78 53) УДК 621.436-531.6(088.8) по делам нзобретени и открытий) СИСТЕМА УПРАВЛЕНИЯ МНОГОВАЛЬНОЙ С СИЛОВОЙ УСТАНОВКОЙ Изобретение огносится к области автоматического управления судовыми установками, в частности многовальными, в которых на каждый вал работает свой двигатель,Известна система управления установкой 5 из нескольких силовых агрегатов, кинематически связанных с общим выходным валом, содержащая регуляторы режимов каждого агрегата, соединенные выходными звеньями с дозирующими органами топливоподачи и 10 снаожснные управляющими блоками каждого агрегата, взаимодействующими с переключателехт режима работы 111.Известная система обеспечивает синхронную работу агрегатов, однако отсутствует воз можность управления каждым из них в отдельности и в любой комбинации.Известна также система управления многовальной судовой силовой установкой, в которой на каждый вал работает свой двигатель, 20 содержащая установленные на пульте управления ручные задатчики режимов каждого из двигателя и многопозиционный командный орган с переключателем на выходе, пропорционально-интегральный регулятор, входы кото рого подключены к датчику и задатчику скорости хода судна, а выход - к одному из входов сучматора, другой вход которого подключен к одному из ручных задатчиков режимов двигателя, и следящие исполнитель- З 0 ные механизмы в цепи управления каждым нз двигателей 2.Недостатком этой системы является то, что она не позволяет реализовать различные программы нагрузки двигателей, что является необходимым в случае, когда установка состоит из двигателей различной мощности. Система не позволяет также сохранить дистанционное управление установкой в случае выхода из строя датчиков оборотов двигателей или скорости хода судна.Целью изобретения является расширение функциональных возможностей систсчы и повышение ее надежности.Это достигается тем, что она снабжена установленным на выходе сумматора дополнительным следящим нсполнитсльныч механизмом и кинематпчески связанным с нпм валом с установленными на нем по числу двигателей кулачками, дополнительнычн подпружиненными задатчиками, взаимодействующими с кулачками, устройствами временного програчмирования, каждое из которых подключено к выходу соответствующего дополнительного задатчика, масштабирующим устройством, включенным между входом одного пз ручных задатчиков режимов двигателя и одним из входов переключателя многопозиционного командного органа и переключателем выбора вида управления, неподвижные контакты когорого подключены к следящим исполнительным механизмам в цепи управления каждым двигателем, а подвижный контаы соединен с выходом многопозиционного командного органа.11 а чертеже изображена функциональная схема системы управления, например, трехВальной судовой силовой установкой.Система содержит установленные на пультс 1 управления ручные задатчики 2, 3 и 4 режимов каждого из двигателей 5, 6 и 7, многопозиционный командный орган 8 с переклю чателем 9 на выходе, пропорционально-интегральный регулятор 10, входы которого подключены к задатчику (на чертеже не показан) скорости хода, входящему в состав командного органа Ь, и датчику 11 скорости хода судна, а выход - к одному из входов сумматора 12, другой вход которого подключен к одному из ручных задатчиков, например 3. Выход сумматора 12 подключен ко входу дополнительного следящего исполнительного механизма 13, с которым кинематически связан вал 14 с установленными на нем кулачками 15, 16 и 17, взаимодействующими с дополнительными подпружиненными задатчиками 18, 19 и 20, выходы которых подключены соответственно через устройства 21, 22 и 23 времеш 1 ого программирования и переключатель 24 выбора вида управления с неподвижными 24.1, 24.2, 24.3 и подвижным 24.4 контактами к следящим исполнительным механизмам 25, 26 и 27 в цепях управления двигателями 5, 6 и 7, приводящими в движение судно 28. 11 одвижный контакт 24.4 переключателя 24 соединен с выходом командного органа 8. Система содержит также масштабирующее устройство 29, включенное между выходом одного из ручных задатчиков, например 3, и одним из входов регулятора 10,Система работает следующим образом, 11 ри включении командного органа на режим раздельного управления двигателями переключатель 24 своими контактами подклю. чает следящие исполнительные механизмы 25, 26 и 27 непосредственно к ручным задатчикам 2, 3 и 4 и управление каждым двигателем ведется независимо от других двигателей.В режиме совместного управления двигателями 5, 6 и 7 переключатель 24 подключает механизмы 25, 26 и 27 к выходам дополнительных задатчиков 18, 19 и 20 через устройства 21, 22 и 23, В этом режиме переключатель 9 подключает оба входа регулятора 10 к датчику 11 скорости хода судна для приведения его выходного сигнала к нулю. Сигнал с ручного задатчика 3, выбранного, например, для совместного управления, поступает на сумматор 12, и, сложившись с нулевым сигналом от регулятора 10, проходит без изменения на дополнительный следящий исполнительный механизм 13, разворачивающий вал 14 с кулачками 15, 16 и 17, которые воздействуют па дополнительные задатчики 18, 19 и г 10 15 20 2 д 30 Зб 40 45 50 55 00 05 20, измсняОщис задание режимов ьссх дВНГатслсй одновременно.1 ак как к лачки 1 О, 16 и 17 нмсю 1 регулируемый профиль, то каждому двигателю можсг быть задана индиВидуальная нрОГрамма.1 стройства 21, 22 и 23 позволяют ььшолииь эгу программу оптимальной во времени.11 ри усганОВке Орга 1 на Ь В НОложенис управления скоростью хода судна 2 Ь персклочатель 9 подсоединяет один из ьходов ре улятора 10 к масштабирующему устройству "9.11 ри задании определенной скорости задатчиком 3 сигнал с него через устройство 29 поступает на вход регулятора 10 и через сумматор 12 к механизму 13, который разворачивает общий вал 14, Скорость прохождения сигнала по последней цепи ничем не ограничивается, поэтому командные сигналы в цепях управления двигателями начинают изменяться с максимально допустимой скоростью, определяемой устройствами 21, 22 и 23.1 ак как масшгабирующее устройство выполнено с таким коэффициентом преобразования, что увеличение величины задания скорости всегда больше, чем увеличение команды на входе сумматора 12, Го после исполнения меланизмами 25, 26 и 27 команды от задаТЧИКа 3 ЗадаННая СКОРОСТЬ остигнута Нс будет. Для достижения ее треб, ется дополнительное увеличение задания механизмам 25, 26 и 27. Зто осуществляется регулягором о, сравнивающим сигнал на выходе ус ройства 29 и датчика 11 и вырабатывающего сигнал коррекции на сумматор 12.Г истема позволяет осуществлять переходы с одного режима управления на другой при сохранении оптимальносги управления и Обеспечивает повышение надежностиправления. Формула изобретения Система управления многовальной судовой силовой установкой, в огорой на каждыи вал работает свой двигатель, содержащая установленные на пульте управления ручные задатчики режимов каждого из двигателя и многопозиционный командный орган с переключателем на выходе, пропорционально-интегральный регулятор, входы которого подключены к датчику и задатчику скорости хода судна, а выход к одному из входов сумматора, другой вход которого подключен к одному из ручных задатчиков режимов двигателя, и следящие исполнительные механизмы в цепи управления каждым из двигателей, о тл и ч а ю щ а я с я тем, что, с целью расширения функциональных возможностей системы и повышения надежности, она снабжена установленным на выходе сумматора дополнительным следящим исполнительным механизмом и кинематически связанным с ним валом с установленными на нем по числу двигателей кулачками, дополнительными подпружиненными задатчиками, взаимодействующими612849 Составитель Г. КорневаРедактор Т. Горячева Техред Н. Рыбкина Корректор Л. Денискин ПодписноеССР Заказ 1258/11НП Изд,520сударственного ком по делам изобр13035, Москва, ЖТираж 568ета Совета Мпнистроений и открытийРаушская наб., д. 4/5 Типография, пр. Сапунова,с соответствующими кулачками, устройствами временного программирования, каждое из которых подключено к выходу соответствующего дополнительного задатчика, масштабирующим устройством, включенным между выходом одного из ручных задатчиков режимов двигателя и одним из входов переключателя многопозиционного командного органа и переключателем выбора вида управления, неподвижные контакты которого подключены к 6следящим исполнительным механизмам в цепи управления каждым двигателем, а подвижный контакт соединен с выходом многопозиционного командного органа.5 Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР %453677,кл. б 05 Р 13/34, 1971.2. Авторское свидетельство СССР38106 г"10 кл. 6 05 Р 13/34, 1969.
СмотретьЗаявка
2327464, 03.02.1976
ПРЕДПРИЯТИЕ ПЯ Г-4372
ПУШИН ЮРИЙ НИКОЛАЕВИЧ, НОВАК ВИТОЛЬД ВИКТОРОВИЧ, НИКИТЮК ЮРИЙ ТИТОВИЧ, ШРАЕР АЛЕКСАНДР ИЗРАИЛЕВИЧ, НАЙДЮК ПЕТР ПРОКОПЬЕВИЧ, ОРЛОВ АЛЕКСЕЙ АЛЕКСЕЕВИЧ, ПОЧИКАЕВ ЮЛИАН ВИКТОРОВИЧ, КРАСНИКОВ ГЕРГИЙ ФЕДОРОВИЧ
МПК / Метки
МПК: B63H 21/22
Метки: многовальной, силовой, судовой, установкой
Опубликовано: 30.06.1978
Код ссылки
<a href="https://patents.su/3-612849-sistema-upravleniya-mnogovalnojj-sudovojj-silovojj-ustanovkojj.html" target="_blank" rel="follow" title="База патентов СССР">Система управления многовальной судовой силовой установкой</a>
Способ регулирования теплового режима методической индукционной установки и устройство для его реализации

Номер патента: 725277
Опубликовано: 30.03.1980
Авторы: Данилушкин, Рапопорт, Шеркин
МПК: H05B 5/04
Метки: индукционной, методической, реализации, режима, теплового, установки
...подаваемую на индуктор 1.Температура изделия 3 контролируетсядатчиками 4 и 5, а скорость - датчиком 6,сигналы с которых поступают в блок регулирования 7,При работе в установившемся режиме спостоянной скоростью сигналы с датчика 6и датчика 5 воздействуют на регулирующиеблоки 7, которые выделяют сигналы отклонения фактической температуры на выходеиз каждой зоны до заданной, устанавливаемой в функции скорости перемещения изделия,В 1 переходном режиме изменения скоро-, 20сти перемещения металла в печи сигналыдатчика 6 и датчиков 4 воздействуют нафункциональные регулирующие блоки 7,управляющие источниками питания 2 индуктора 1 таким образом, что реализуемаявременная программа изменения тепловоймощности нагревателя обеспечивает высокую...
Устройство для регулирования теплового режима методической индукционной установки

Номер патента: 1107347
Опубликовано: 07.08.1984
Авторы: Данилушкин, Зимин, Рапопорт, Синдяков
МПК: H05B 6/06
Метки: индукционной, методической, режима, теплового, установки
...ного напряжения и соответствующимстационарному распределению температуры металла, и суммой сигналов О пропорциональных текущим значениям температур Т и Т металла в точках, соответствующих координатам Х и Х установки датчиков 8 и 7 температуры, т.е. 0: К(Тх + Тх )где К - коэффициент пропорциональности.Таким образом, на вход регулирующего блока 4 поступает сигнал, который сформирован сумматором 13 в момент пуска нагревателя и пропорционален разности Оц-К(Т + ТК), Ве. личина этого сигнала соответствует той мощности, которая необходима для выдачи всех заготовок, находящихся в нагревателе в момент пуска, с заданной температурой,Регулирующий блок 4 воздействует на источник 3 питания, который под 1107347водит к индуктору 2 требуемый уровень...
Задатчик командного давления

Номер патента: 183551
Опубликовано: 01.01.1966
Авторы: Взоров, Крицын, Туфлйк
МПК: B64D 13/04, G05D 16/06
Метки: давления, задатчик, командного
...задатчик командного давле ия.Задатчик состоит из узлов абсолютного дав. ения 1, избыточного давления 2, скорости изменения давлепия 3 и коррекции перепада давления 4. Полость последнего разделена подпружиненной мембраной 5 с жестким центром б на две камеры: надмембранную 7 и подмембранную 8. Клапан 9 подмембранной камеры, прикрепленный к жесткому центру б мембраны 5, перекрывает проходное сечение канала 10, сообщающего названную камеру с гермокабипой. Кроме того, подмембранная камера сообщается с атмосферой через нерегулируемый дроссель 11. Надмембранная камера соединяется с атмосферой через регулируемый дроссель 12, а с гермокабиной - через нерегулируемый дроссель 13.Устройство работает следующим образом.Давление поступает из...
Задатчик командного давления

Номер патента: 185649
Опубликовано: 01.01.1966
МПК: B64D 13/04, G05D 16/06
Метки: давления, задатчик, командного
...с помощью регулировочного винта, отличающийся тем, что, с целью повышения его надежности, его запорный орган смонтирован на плоской пружине, укрепленной на внутренней стенке корпуса, ис ключающей смещение запорного органа относительно седла при деформациях чувствительного элемента. в полости пустимое Известны задатчики командного давления для систем регулирования давления в герме. тических кабинах летательных аппаратов, содержащие подпружиненный чувствительный элемент с прикрепленным к нему запорным клапаном.Предлагаемый задатчик отличчто его запорный орган смонтировакой пружине, укрепленной на внутрке корпуса.Центровка запорного клапана относительно седла, не зависящая от центровки чувствительного элемента, обеспечивает...
Задатчик командного давления

Номер патента: 473411
Опубликовано: 27.12.2005
Авторы: Крицын, Сидельников
МПК: B64D 13/04, G05D 16/00
Метки: давления, задатчик, командного
1. Задатчик командного давления, содержащий регулируемый упругий орган и взаимодействующий с ним чувствительный элемент, разделяющий корпус задатчика на полость, соединенную с источником опорного давления, и полость, соединенную с исполнительным клапаном и через дроссель - с гермокабиной, а также устройство, демпфирующее колебания упругого органа задатчика, отличающийся тем, что, с целью повышения надежности задатчика в работе за счет улучшения демпфирования собственных колебаний упругого органа задатчика, демпфирующее устройство выполнено в виде надувной эластичной камеры, укрепленной на неподвижных элементах корпуса.2. Задатчик по п.1, отличающийся тем, что между упругим органом...
Предыдущий патент: Корпус плавсредства
Следующий патент: Гидравлическая система управления плавающим средством
Случайный патент: Гидравлический пресс