Гусеничный привод “плавающего” типа
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
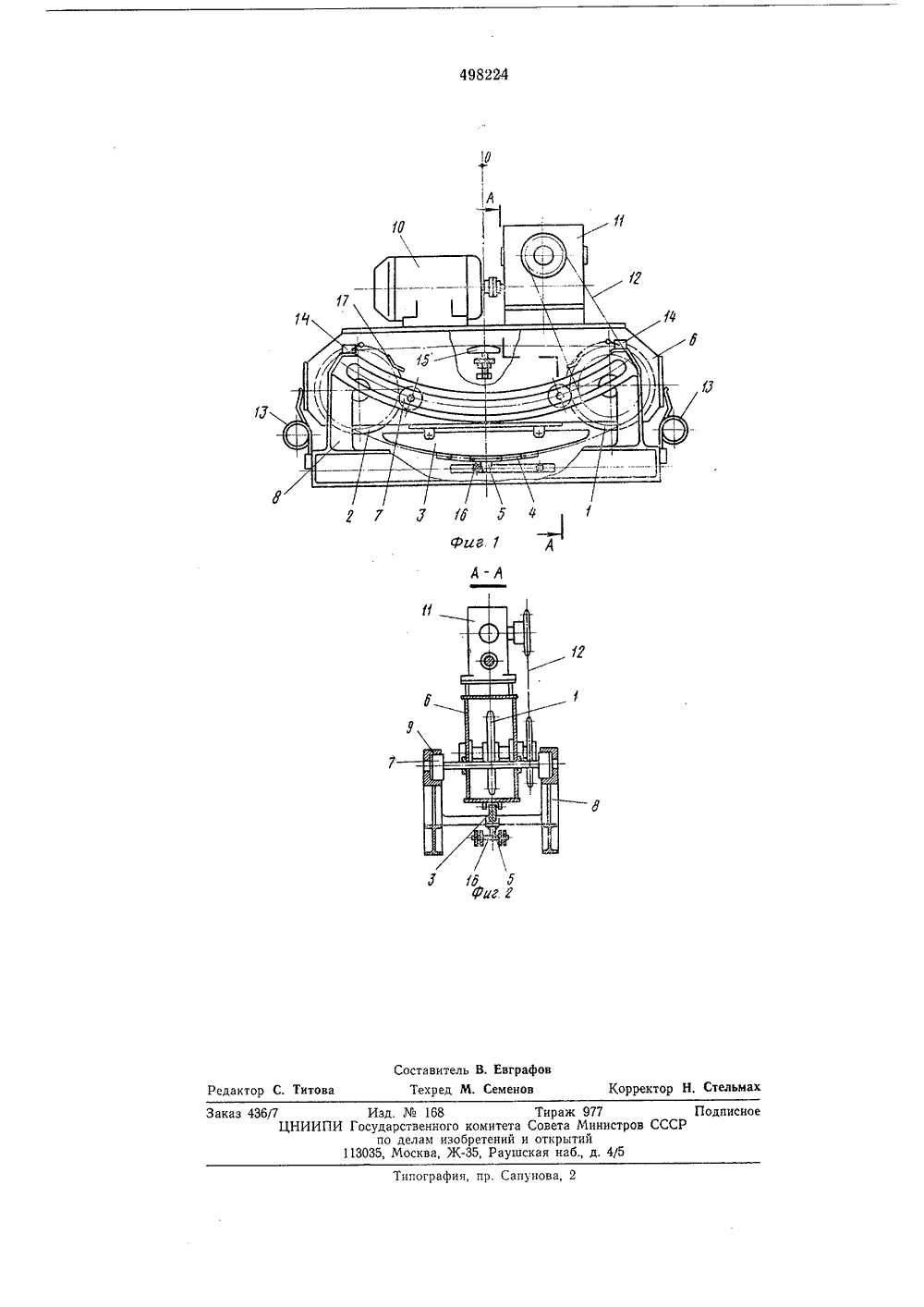
111 498224 ОПИСАНИЕ ИЗОБРЕТЕН ИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(61) Дополнительное к авт, свид-ву л В 656 23/00 2) Заявлено 06,03.72 1755862/27-1 рисоединением за киГосударственнык комитет Приоритет овета Министров СС о делам изобретеии(53 21.867.1 (088.8) ллетень1 ания 08.04,76 Опубликовано 05,01.76, Б Дата опубликования опи рытий(71) Заявитель В, А. Евграфов и иностранец Р, П. Радев (Болгария)Ленинградский ордена Ленина политехнический институ им.М, И, Калинина 4) ГУСЕНИЧНЫЙ ПРИВОД ПЛАВАЮЩЕГО Т Изобретение относится к реверсивным многоприводным подвесным конвейерам с пространственной трассой, в частности, к гусеничным приводам плавающего типа с неуправляемыми кулаками и криволинейной направляющей.Известны гусеничные приводы плавающего типа преимущественно для реверсивных многоприводных конвейеров, содержащие станину с установленной и зафиксированной на ней посредством упругих связей, например торсионных пружин, подвижной рамой, на которой смонтирована система передач, преобразующая крутящий момент электродвигателя в тяговое усилие толкающих кулаков, жестко присоединенных к звеньям гусеницы, огибающей криволинейную направляющую, закрепленную в нижней части рамы.Однако в известных гусеничных приводах плавающего типа плавающая их часть перемещается прямолинейно, что исключает возможность снижения нагрузки на пружины за счет использования собственного веса привода в уравновешивании реакции тягового усилия.Цель изобретения - повышение плавности и снижение нагрузки на пружины,Для этого в предлагаемом приводе станина снабгкена продольными направляющими, выполненными в форме дуг окружностей, концентричных криволинейной направляющей гусеницы, а рама снабжена катками, посредством которых она установлена в продольных направляющих станины.5 С целью обеспечения использования равнойдоли составляющей силы тяжести привода независимо от направления движения тягового органа центр тяжести подвижной рамы с установленными на ней элементами привода в 10 нерабочем положении может находиться навертикали, проходящей через центр кривизны направляющей приводного механизма.На фиг. 1 изображен предлагаемый привод;на фиг. 2 - разрез по А - А на фиг. 1, 15 Приводная и отклоняющая звездочки 1 и 2и криволинейная направляющая 3, огибаемые замкнутой цепью 4 с жестко закрепленными на ее звеньях толкающими кулаками 5, смонтированы на подвижной раме 6. Последняя 20 посредством катков 7 установлена на станине8, причем катки могут перемещаться по опорным поверхностям 9 пазов станины 8. Опорные поверхности 9 пазов имеют форму дуг окружностей, центр которых лежит в точке О, в 25 которой также находится центр дуги окружности направляющей 3.Подвижная рама 6 с установленными наней электродвигателем 10, редуктором 11, системой передач 12, звездочками 1 и 2, направ ляющей 3, цепью 4 с кулаками 5 составляет5 10 15 20 25 зо 35 40 45 50 55 50 плавающую часть привода, которая фиксируется на станине 8 упругими связями 13. Электродвигатель 10, редуктор 11 и другие узлы на подвижной раме размещены так, что общий центр тяжести плавающей части привода в нерабочем положении находится на вертикали, проходящей через точку О.Упругие связи 13, выполненные в виде торсионных пружин, включаются в работу в равной степени независимо от направления отклонения подвижной рамы 6 от равновесного положения, Конечные выключатели 14 отключают электродвигатель и останавливают конвейер в случае опасной перегрузки привода. Необходимый первоначальный натяг замкнутой цепи 4 создается натяжным устройством 15.Привод работает следующим образом.В нерабочем состоянии подвижная рама 6 находится в равновесном положении, при котором центр тяжести плавающей части привода находится на вертикали, проходящей через точку О. Упругие связи 13 в этом положении нагружены лишь начальными монтажными усилиями. В момент пуска электродвигатель 10 через систему механических передач (редуктор 11 и передачи 12) начинает вращать звездочку 1, которая перемещает замкнутую цепь 4 приводного механизма, Толкающий кулак 5, закрепленный на звеньях цепи 4, входит в зацепление с ведомым элементом цепи конвейера 16, создавая необходимое тяговое усилие, которое выводит подвижную раму 6 из положения равновесия. Она поворачивается вокруг точки О, перемещаясь на катках 7 по опорным поверхностям 9 в пазах станины 8, деформируя упругие связи 13. В результате отклонения центра тяжести от начального равновесного положения сила собственного веса плавающей части привода создает восстанавливающий момент, величина которого тем выше, чем больше угол поворота рамы 6 относительно точки О, Следовательно, часть внешней нагрузки постоянно воспринимается составляющей силы тяжести плавающей конструкции привода.Перемещение подвижной рамы 6 на катках 7 по опорным поверхностям 9 в пазах станины 8 будет происходить до тех пор, пока тяговое усилие, требуемое для обеспечения движения цепи конвейера, не уравновесится силами от деформации упругих связей 13 и составляющей силы тяжести плавающей части привода, Если возникнет опасная перегрузка привода, то подвижная рама 6 поворачивается на предельный угол, при котором линейка 17 нажимает на конечный выключатель 14, подавая команду в электрическую цепь управления на отключение двигателя и остановку конвейера. Перемещение подвижной рамы 6 при нормальном установившемся движении происходит до положения, когда восстанавливающий момент от упругих связей и от составляющей силы тяжести плавающей части привода становится равным моменту от тягового усилия, необходимого для перемещения рабочих элементов конвейера при номинальном режиме их загрузки.Случайное изменение тягового усилия вызывает дополнительное перемещение подвижной рамы 6. Тогда вследствие концентрично сти криволинейной направляющей 3 и опорных поверхностей 9 пазов станины 8 скорость движения толкающего кулачка 5 увеличивается или уменьшается в зависимости от направления движения рамы 6 на величину скорости поворота плавающей части привода вокруг точки О. Такое сложение скоростей способствует перераспределению нагрузки между двигателями в многоприводном конвейере.Описанный процесс происходит одинаково при отклонении рамы 6 от положения равновесия как вправо, так и влево. Поэтому данная конструкция привода обеспечивает работу реверсивного конвейера одинаково в обоих направлениях,Формула изобретения 1. Гусеничный привод плавающего типа преимущественно для реверсивных многоприводных конвейеров, содержащий станину с установленной и зафиксированной на ней посредством упругих связей, например торсионных пружин, подвижной рамой, на которой смонтирована система передач, преобразующая крутящий момент электродвигателя в тяговое усилие толкающих кулаков, жестко присоединенных к звеньям гусеницы, огибающей криволинейную направляющую, закрепленную в нижней части рамы, отличающийся тем, что, с целью повышения плавности и снижения нагрузки на пружины, станина снабжена продольными направляющими, выполненными в форме дуг окружностей, концентричных криволинейной направляющей гусеницы, а рама снабжена катками, посредством которых она установлена в продольных направляющих станины.2. Привод по п. 1, отличающийся тем, что, с целью обеспечения использования равной доли составляющей силы тяжести привода независимо от направления движения тягового органа, центр тяжести подвижной рамы с установленными на ней элементами привода в нерабочем положении находится на вертикали, проходящей через центр кривизны направляющей приводного механизма.7 Изд.168 Тираж 977 ЦНИИПИ Государственного комитета Совета Министров ССС по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5
СмотретьЗаявка
1755862, 06.03.1972
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. М. И. КАЛИНИНА
ЕВГРАФОВ ВЯЧЕСЛАВ АЛЕКСАНДРОВИЧ, РАДЕВ РАДОСТИН ПЕНЕВ
МПК / Метки
МПК: B65G 23/00
Метки: гусеничный, плавающего, привод, типа
Опубликовано: 05.01.1976
Код ссылки
<a href="https://patents.su/3-498224-gusenichnyjj-privod-plavayushhego-tipa.html" target="_blank" rel="follow" title="База патентов СССР">Гусеничный привод “плавающего” типа</a>
Устройство для герметизации щели между подвижной и неподвижной частями крыла изменяемой стреловидности

Номер патента: 1277525
Опубликовано: 20.05.2005
МПК: B64C 3/40
Метки: герметизации, изменяемой, крыла, между, неподвижной, подвижной, стреловидности, частями, щели
1. Устройство для герметизации щели между подвижной и неподвижной частями крыла изменяемой стреловидности, содержащее щиток, установленный на подвижной части крыла и включающий козырек, укрепленный на подпружиненной кулисе, отличающееся тем, что, с целью повышения надежности работы путем повышения жесткости фиксации щитка, оно снабжено двуплечей качалкой, укрепленной на кулисе своим центральным шарниром и помещенной между ней и пружиной, одно из плеч которой выполнено с законцовкой в виде ролика, профилированной направляющей, размещенной на подвижной части крыла, в которую помещена законцовка качалки, упором, расположенным на неподвижной части крыла и контактирующим с другим плечом...
Устройство для определения координат центра тяжести изделий

Номер патента: 658417
Опубликовано: 25.04.1979
Авторы: Голиков, Кочетков, Рябой, Свирин
МПК: G01M 1/12
Метки: координат, тяжести, центра
...гр ргдеЬГ - разница показаний противолежащих силоизмерительных датчиков 1011 - расстояние между шарнирами 41Р - вес изделия.Смещение центра тяжести изделия дг определяют по формуледРг Ьд,Х= Для удобства вычислений уголвыбирается одинаковым для каждойоси.Для крепления изделия 5 устройствосодержит блок крепления, выполненныйв виде стола б, шарнирно связанногос рамой 2 с помощью оси 7. Стол 6имеет возможность наклонямощью привода 8, выполненде гидроцилиндра и ;шарниного рамой 2 и столом б,чения наклона стола 6 наугол служит упор 9.На основании, 1 закреплены попар ов двух взаимно перпендикулярныхплоскостях чувствительные элементы10 в виде силоиэмерительных.датчиков,взаимодействующих с рамой 2 черезтела качения 11, причем рама 2...
Устройство для электрической связи неподвижной и подвижной частей объекта

Номер патента: 1713008
Опубликовано: 15.02.1992
Автор: Бодягин
МПК: H02G 11/00
Метки: неподвижной, объекта, подвижной, связи, частей, электрической
...содержит кабельный жгут 1, сформированный в поперечном сечении посредством элементов крепления и бандажа в плоский ремень, который в исходном положении расположен вертикально от подвижной части 2 объекта к неподвижной части 3 и имеет форму волнообразных петель, Кабельный жгут 1 концами закреплен на подвижной 2 и неподвижной 3 частях объекта соответственно скобами 4, 5, В устройстве установлены четыре кабельных жгута 1, максимальное количество которых определяется исходя из габаритов жгута и внутреннего обьема устройства, Горизонтальные ветви волнообразного кабельного жгута 1, расположенные на разных уровнях, за пределами петли закреплены на подвижных каретках 6 посредством прижимной планки 7. Каждая каретка 6 радиально установлена...
Механизм поворота рамы подвижного подъемника

Номер патента: 516604
Опубликовано: 05.06.1976
Автор: Уланов
МПК: B66B 9/16
Метки: механизм, поворота, подвижного, подъемника, рамы
...рычага 1. Свободные концы рычагов 9 подпираются пружинами 12 и упорами 13, являющимися также частью рамы 1. Механизм состоит из двух самостоятельно работающих силовых ветвей, каждая из которых нагружается своим двигателем и передает усилие через свой редуктор, цепную и промежуточную передачу на свою цепь, Обе силовые ветви замыкаются на рычагах 9.Механизм работает следующим образом.Два асинхронных электродвигателя передают вращение через два редуктора(правый и левый) на цепные передачи 5, приводя в движение вал ведомой звездочкой 7. Цепь 8, перематываясь вокруг ведомой звездочки 7, поворачивает раму 1 в направлении, зависимом от направления вращения электродви О гателя, Неравномерность хода двигателей, разность их числа оборотов,...
Устройство для соединения тягового органа привода с передвижной рамой грузового вагона

Номер патента: 518401
Опубликовано: 25.06.1976
Авторы: Жерихов, Макаров, Павелко, Хазан
МПК: B61D 3/16
Метки: вагона, грузового, органа, передвижной, привода, рамой, соединения, тягового
...гайками 14,силие предварительной затяжки амортизаора 8 несколько превосходит .тяговое усиче привода 2.Валики 15, уста проушиах 16 и 17 каната риКреп О н б н 5 м к и О У т л 1 нвтулкой 2 О болРИЗМЕШЕННОМУ В Напттацттн;ОЦП.; . -.;аВ-. - . ЛИЮШИЕ 22 устацоВЛЕтд;1 В ПаЗу ЛИС т а ПЕРЕДВИжНОй РаМЫ 5 ПРа. в .;ЕЛЬ.Ч.ит крепятся болтами 24 и им.,ют .лицут -,ревы-. шаюшую длину ползуна 19, по,:Оцьюе:, ы:. ре, на величину двойного хода ъ .Сртизатора 8.Устройство работает следуюшцм образом, Передвижная рама,з перемецгается вдоль грузового вагона 1, перекатьваясь катками 7 по рельсам 4, Усилие от привода 2 к передвижной раме 5 при выкатке передается ЧЕРЕЗ Канат .т 8, ОГИба 1 от 1 ттяй утотанОВтЕННЫЙ ца другом конце гр"тзово:О Вагоца .,...
Предыдущий патент: Устройство для транспортирования штучных грузов
Следующий патент: Устройство для периодической остановки шагового транспортера
Случайный патент: Ветроэлектрический агрегат, способ управления ветроэлектрическим агрегатом и устройство для его осуществления