Фазовая система программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 473851
Автор: Соколов
Текст
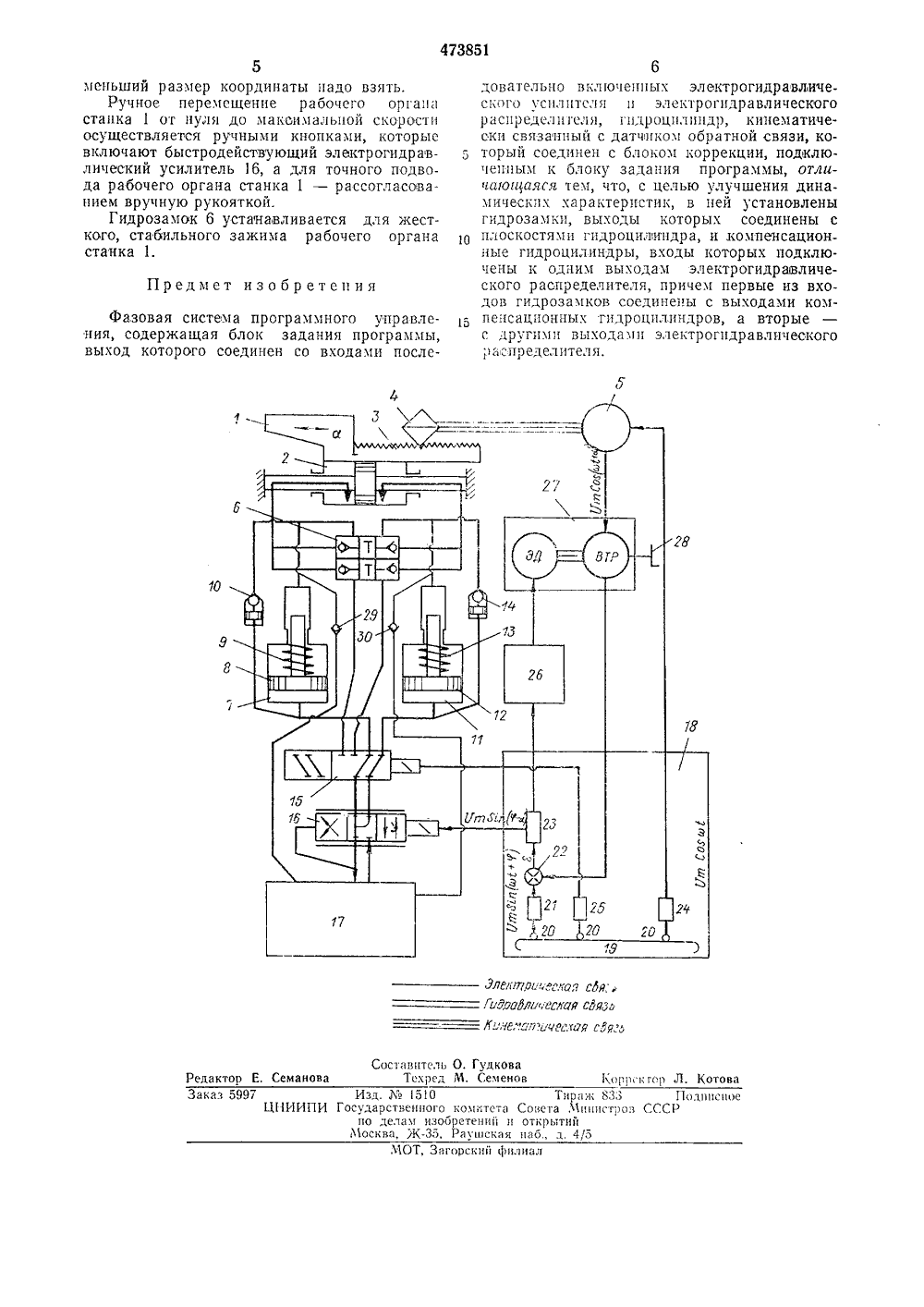
ОЙ МСАЙИЕ ИЗОБРЕТЕН ИЯ" 473851 Союз Советскии Социалистицеске РеспубликГосударстеенныи комете Совета Министров ССС по делам изобретений и открытий(71) Заявите ЕМА ПРОГРАМ 54) ФЛЗОВАЯ ГО УПРЛВДЕН Изобретение относится к области станкостроения и может быть использовано в станках с программным управлением.Известна фазовая система программногоуправления, содержащая блок задания,программы, выход которого соединен со входамипоследовательно включенных электрогидравлического усилителя и электрогидравличеокого распределителя, гидроцилиндр, кинематически связанный с датчиком обратной овязи, который соединен с блоком коррекций,подключенным к блоку задания программы.Однако динамичеокие характеристики ееневысокие.В предложенной системе установлены гидрозамки, выходы которых соединены с полостями гидроцилиндра, и компенсационныегидроцилиндры, входы которых подключены кодним выходам электрогидравлического распределителя, причем лервые из входов гидрозамков соединены с выходами компенсационных гидроцилиндров, а вторые - с другимпвыходами электрогидравличеокого распределителя, что позволяет улучшить ее динамические характеристики.На чертеже изображена схема описываемой фазовой системы программного управления,Фазоваяния состоитсистема программного управле з рабочего органа станка 1, свя занного с гидроцилиндром 2, который через рейку 3 и безлюфтовый редуктор 4 связан с датчиком обратной связи 5, Гидроцилиндр через гидрозамки 6 и компенсационные гид роцилиндры, состоящие: левый - из цилиндра7, поршня 8, пружины 9, и обратного клапана 10, правыи - из цилиндра 11, поршня 12, пружины 13, обратного клапана 14, связан с электрогидравлическим распределителем 15 и и быстродействующим электрогидравлическимусилителем 16, который подключен к насосной станции 17.Управление гидроцилиндром по заданнойпрограмме осуществляется блоком задания программы 18 (состоящим из магнитной лен.ты 19 с головками 20, усилителя 21 рабочего сигнала, фазового дискриминатора 22 с усилителем мощности 23, который связан с быстродействующим гидравлическим усилителем 16; усилителя опорного сигнала 24, который связан с датчиком обратной связи 5; усилителя 25 сигнала управления, который связан с электрогидравлическим распределителем 15), блоком 26 задания изменения размера координаты и блоком 27 коррекции на заданное изменение размера координаты. Для ручного управления рабочего органа станка служит рукоятка 28. Ооратные клапаны 29 и 30 служат для возврата поршней компенса- ЗО циопных гидроцилиндров.3Описанная фазовая система программного управления работает следующим образом.Вкл 1 очасгся насоспа станци 17, блок задания программы 18 на холостом ходу, рабочий орган станка 1 и гидроцилицдр 2 ставятся в исходное положение и вводится задание изменения размера координаты с блоков 26 и 27, Блок задания программы 18 и насосная станция 17 включаются на рабочий ход и начинается перемещение рабочего органа координаты а по заданной программе.На двух дорожках магнитной ленты 19 записаны синусоидальные сигналы - рабочий У,з 1 п(ж+р) и опорный У, созж 1. Фаза ср рабочего сигнала определяет собой заданный закон изменения управляемой координаты а, На третьей дорожке или за(писывается постоянный сигнал, или нет никакого сигнала в зависимости от заданной скорости перемещения рабочего органа координаты а. Сигнал с головки 20 отсутствует, и электрогидравлический распределитель 15 находится в положении, указанном на чертеже. Рабочий сигнал считывается магнитной головкой 20, усиливается усилителем 21 рабочего сигнала и подается на вход фазового дискриминатора 22.Опорный сигнал считывается магнитной головкой 20, усиливается усилителем опорного сигнала 24 и подается па датчик обратной связи 5, ротор которого кицематически связан через безлюфтовый редуктор 4 и рейку 3 с рабочим гидроцилиндром 2 рабочего органа станка 1. Его выход, а которсо 1 получается сигнал У,сов (со 1+а), где а - электрический сигнал, равный механическому а, подается на один из,входов фазового дискрими. натора 22, являющегося в первом приближе. нии множительным устройством.На другой вход фазового дискриминатора ( как было указано выше), подается усиленный рабочий сигнал У,з 1 п (о 1+). В результате перемешивапня этих сигналов па выходе получается сигнал, постоянная составляющая которого Х пропорциональна 0,51 п ( - а). Это напряжение является сиг. налом ошибки следящего привода. Далее этот сигнал усиливается усилителем мощности 23 и подается на быстродействующий электро- гидравлический усилитель 16, который подает рабочую жидкость из насосной станции 17 через электрогидравлический распределитель 15 в компенсационный цилиндр 11 (например, правый) - поршень 12 начинает перемещаться и через гидрозамок б подает рабочую жидкость, уменьшенную по расходу в несколько раз, в гидроцилицдр 2. Слив жидкости из рабочего гидроцилиндра 2 происходит через гндрозамок 6, обратный клапан 10, электрогидравлический распределитель 15 и электрогидравлический усилитель 16 в насосную станцию 17. Начинается перемещение рабочего органа станка 1. Рейка 3, перемещаясь через безлюфтовый редуктор 4, стре 5 10 15 20 25 Зо 35 40 ,15 50 00 65 4мптся установить управляемую координату ав такое положение, при котором сигнал ошибки равен или близок к нулю, Для перемещения рабочего органа станка 1 на большихскоростях подачи рабочей жидкости на двухдорожках магнитной ленты 19 записываютсясинусоидальные сигналы - рабочий и опорный, а на третью дорожку записывается постоянный сигнал. В таком случае сигнал сголовки 20, усиленный усилителем 25, переключает электрогидравлический распределитель 15 и соединяет быстродействующийэлектрогидравлический усилитель 16 напрямую с рабочим гидроцилиндром 2 через гидрозамок бРабочий сигнал считывается магнитнойголодовкой 20, усиливается усилителем 21 рабо.чего сигнала и подается ца вход фазовогодискриминатора 22,Опорный сигнал считывается магнитнойголовкой 20, усиливается усилителем опорного сигнала 24 и подается на датчик обратной связи 5, выход которого является сигналом фазового дискриминатора 22,На другой вход фазового дискриминатора(как было указано выше) подается усиленный рабочий сигнал из усилителя 21. В результате перемешивания этих сигналов на выходе получается сигнал ошибки следящегопривода, который усиливается усилителеммощности 23 и подается на быстродействующий электрогидравлический усилитель 16, который подает рабочую жидкость из насоснойстанции 17 через переключепный электрогидравлический распределитель 15, непосредственно через гидрозамок 6 в рабочий гидроцилицдр 2 - начинается перемещение рабочего органа станка 1 на больших скоростях.Рейка 3, перемещаясь через безлюфтовыйредуктор 4, стремится установить управляемую координату а в такое положение, прикотором сигнал ошибки равен и близок к нулю,В любой момент, когда гидроцилиндр 2,перемещаясь в ту или другую сторону, останавливается, пружины 9 или 13 возвращаютпоршни 8 и 12 в исходное положение, что позволяет всегда вводить в рабочее положениекомпенсационные гидроцилиндры,Если требуется в систему управления гидроцилиндром по данной программе ввестикоррекцию изменения размера координаты, товключают блок 26 задания изменения размера координаты с заданной степенью коррек.ции размера координаты. Тогда рабочий сигнал ошибки следящего привода из усилителямощности 23 кроме быстродействующегоэлектротидравлического усилителя 16 подается в блок задания изменения размера координаты, который по заданной программе воздействует на блок 27 коррекции на заданноеизменение размера координаты и дополнительно рассогласовывает рабочий сигналошибки следящего привода в ту или другуюсторону в зависимости от того, больтпий или,ЧОТ, Загорский филиал каз 5997ЦНИИП Тираж 833Сонета Министроии открытийя нао., д. 4/о ПоднисносССР 5меньший размер координаты надо взять.Ручное перемещение рабочего органа станка 1 от нуля до максимальной скорости осуществляется ручными кнопками, которые включают быстродействующий электрогидравлический усилитель 16, а для точного подвода рабочего органа станка 1 - рассогласованием вручную рукояткой.Гидрозамок 6 устанавливается для жесткого, стабильного зажима рабочего органа станка 1. Предмет изобретения Фазовая система программного управления, содержащая блок задания программы, выход которого соединен со входами последовательно включенных электрогидравлического усилителя и электроптдравлического распределителя, гидроцнлиндр, кинематически связанный с датчн 1 ком обратной связи, который соединен с блоком коррекции, подключенпым к блоку задания программы, отличаюн 1 аяся тем, что, с целью улучшения динамических характеристик, в ней установлены гидрозамки, выходы которых соединены с плоскостям и гидр оцилчгндр а, и ком пенс ацион ные гидроцилиндры, входы которых подключены к одним выходам электрогидра 1 влического распределителя, причем первые из входов гидрозамков соединены с выходами компенсационных гидроцплиндров, а вторые с другимп выходами электроп 1 дравлического распределителя.
СмотретьЗаявка
1951480, 01.08.1973
СОКОЛОВ ВИКТОР НИКОЛАЕВИЧ, СОКОЛОВ ВАЛЕНТИН ВИКТОРОВИЧ
МПК / Метки
МПК: F15B 21/02
Метки: программного, фазовая
Опубликовано: 15.06.1975
Код ссылки
<a href="https://patents.su/3-473851-fazovaya-sistema-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Фазовая система программного управления</a>
Устройство задания больших перемещений рабочего органа машины по направляющей

Номер патента: 1695271
Опубликовано: 30.11.1991
Авторы: Лукомский, Мельников, Мельникова
МПК: G05D 3/00
Метки: больших, задания, направляющей, органа, перемещений, рабочего
...2 ротор 6 измерителя малых перемещений оказывается жестко сцеплен с направляющей 2 (например, за счет притяжения фиксатора 36 в конструкции измерителя по фиг. 2) и освобожден от сцепления (жесткой связи) со статором 5 (обе катушки 32 обесточены). Исходный сигнал с измерителя малых перемещений, пройдя преобразователь 24, записывается в блоке 25 в качестве начала отсчета измерительных малых перемещений,В процессе движения рабочего органа происходит изменение взаимного положения ротора 6 и статора 5 (изменение зазора между электродами 41 и 42 емкостного преобразователя). В течение такта, задаваемого блоком 26 синхронизации, происходит формирование разностного сигнала в блоке 25 вычитания и подача его на вход А первого цифрового компаратора...
Механизм фиксации рабочих положенийисполнительного органа

Номер патента: 821783
Опубликовано: 15.04.1981
Авторы: Ванюков, Виноградов, Голобоков
МПК: F16B 2/18
Метки: механизм, органа, положенийисполнительного, рабочих, фиксации
...втулке 11. Пружина 12 размещена между направляющей втулкой 11 и буртом б, а пружина 13 - между буртом 6 и втулкой 14, с гайкой 15, установленными на свободном конце стержня 7. В стержне 8 имеется полость 16, окно 17 и упор 18 В полости корпуса 4, где размещен стержень 8, на оси 19 шарнирно закреплена четырехконечная звездочкк 20. Сам корпус 1 шарнирно прикреплен к раме 21 осью 22, а вилка 5 осью 23 к рычагу 24 исполнительного органа. Соосно с полэуном 3 установлено ведущее звено толкатель 25.Рычаг 24 закреплен на штанге 26, связанной ири помощи подшипников 2 с . рамой 21. Механизм фиксации рабочих положений исполнительного органа работает следующим образом.При первом нажатии толкателя 25 на стержень 8 ползуна 3 стержень 8 идет влево и...
Способ определения осевого давления рабочей среды на рабочее колесо гидравлического механизма

Номер патента: 56032
Опубликовано: 01.01.1939
Автор: Малышев
МПК: G01M 10/00
Метки: гидравлического, давления, колесо, механизма, осевого, рабочее, рабочей, среды
...подобной установки. Индикатор а укреплен на независимой от агрегата опоре К например, на балке, закрепленной на спущенном с крана крюке, Упор с индикатора установлен против возможно ближе к центру расположенной точки лапы крестовины агрегата. Под влиянием статической нагрузки от веса Р 1 вращающихся частей, лапа крестовины прогибается на некоторую величину х 1. В дальнейшем в работе, при некотором определенном режиме, под влиянием добавочного давления воды на колесо, прогиб крестовины увеличится до величины х 2. Следовательно прогиб от действия этой силы будет равен:х=х 2 - х 1Так как деформации всех частей агрегата заведомо упругие, и к ним применим закон Гука, то по прогибу крестовины можно определить величину давления воды, которая...
Устройство для автоматической установки заданного отношения сигнал-шум

Номер патента: 1298697
Опубликовано: 23.03.1987
МПК: G01R 29/26
Метки: автоматической, заданного, отношения, сигнал-шум, установки
...мощности суммарного сигнала (равной Р ,) и мощности собственных шумов (равной 1- Р ), т.е. На третьем этапе работы в результате сброса триггера 24 снимается сигнал с пятого выхода блока 13 управления, восстанавливая тем самым5 1298697 исходное значение (К ) коэффициента усиления приемного блока 5. Кроме того, через время ь 1 необходимое для окончания переходного процесса в измерителе 6 и определяемое блоком 18 задержки, сигнал управления (фиг. Зд) с его выхода в момент времени 1 поступает на вход генератора 29 одиночных импульсов и на вход блока 19 задержки. В результате этого 1 О формируется одиночный импульс на седьмом выходе блока 13 управления, которий поступает на второй ключ 9 и приводит к запоминанию величины (11 ) выходного...
Устройство для программного управления перемещением рабочего органа станка

Номер патента: 599253
Опубликовано: 25.03.1978
Авторы: Головенкин, Логинов, Хлебников, Шерстобытов
МПК: G05B 19/18
Метки: органа, перемещением, программного, рабочего, станка
...14 обратной связи формирует им- З 0пульсы, поступающие через элемент И 7и элемент ИЛИ 6 на вычитающий выходблока 3 управления перемещением рабочего органа до тех пор, пока он необнулится. В момент обнуления на выходе блока 3 управления появляеисянизкий потенциал, которнй через элементИ 8 и ключевой элемент 12 отключаетпривод 13 рабочего органа и через элементы НЕ 11, И 7 и И 9 переключает 40выход блока 14 обратной связи с вычитаюшего входа блока 3 управления насуммирующий вход блока 5 коррекции.После отключения привод 13 рабочего органа перемещается на некоторуювеличину по инерции, В силу этогоблок 14 обратной связи Формирует импульсы, которые записываются в блок 5корре.;ции, при этом на выходе блока 3управления появляется высокий...
Предыдущий патент: Гидросистема
Следующий патент: Пневматический многовходовой элемент “или”
Случайный патент: Линия изготовления древесных плит