Система программного управления устройством
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
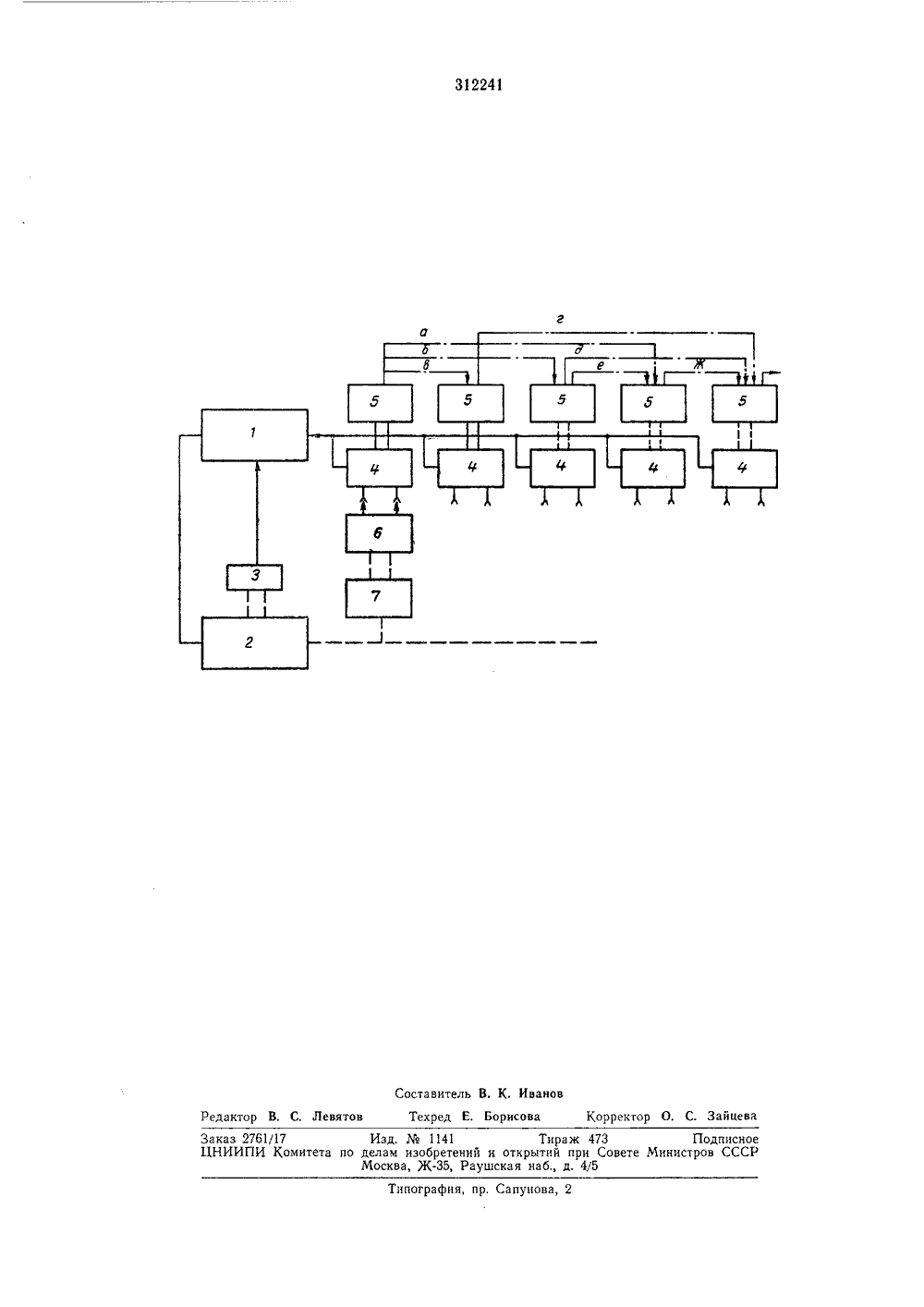
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ 31224 Сааз Саевтский Сациаллсткческкх РеспуалллЗависимое от авт. свидетельствавлено 051968 ( 1225679/18-24) МПК 6 05 Ь 19 присоединением заявкириоритет аапвт па дел забретеннл и аткрытепре Спеете МивпатраеСССР ДК 62-55:531(088.8 Опубликовано 19.Л 11 1971. Бюллетень Дата опубликования описания 12,Х,19 Авторыизобретения Д, Ткасо алагин, Ю. А,Д, В. Анисимов Р. И. Гур Новосибирский, В. Т. КучумЖуренков,Х. Ривкин инный завод и Г,М.Че С. Слуе чко Заявител виа А ПРОГРАММНОГО УПРАВЛЕНИЯ УСТРОЙСТВОМЕНИЯ РАМЫ С ДЕТАЛЯМИ, ПРЕДНАЗНАЧЕННЫМНАНЕСЕНИЯ ГАЛЬВАНИЧЕСКИХ ПОКРЫТИЙ СИСТЕЕРЕМ ЕШ Изобретение относится к системам автоматического управления, в частности к системам программного управления устройством перемещения рамы с деталями, предназначенными для нанесения гальванических покрытий.Известные системы программного управления, содержащие устройства формирования команд управления перемещением и датчики истинного положения устройства перемещения рамы, сложны в эксплуатации.Целью изобретения является упрощение программного управления процессом нанесения гальванических покрытий. Указанная цель достигается тем, что в предложенной системе управления установлены блоки бесконтактных программных датчиков технологического процесса, расположенные непосредственно на ванне и параллельно подключенные к устройству формирования команд управления, а также сменные программоносители, размещенные непосредственно на раме с деталями, переносимыми в ванну по заданному технологическому циклу. Кроме того, устройство перемещения рамы с покрываемыми деталями связано с устройством формирования команд управления через датчики истинного положения, установленнье на устройстве перемещения и подключенные ко входу устройства формирования команд управления перемещением.Сущность изобретения поясняется чертежом. Система программного управления устройством перемещения рамы с деталями, предназначенными для нанесения гальванических покрытий, состоит из устройства формирова ния команд управления перемещением 1, которое управляет работой устройства 2 перемещения рамы с установленными на нем датчиками истинного положения 3. Датчики 3, а также блоки 4 бесконтактных программных 10 дат.иков, расположенные на ваннах 5, подключены к устройству формирования команд управления. Сменные программоносители 6 связаны с рамой 7, а при их расположении в ванне, кроме того, бесконтактно связаны с 15 блоком программных датчиков.Работает система следующим образом.Сменные программоносители б с набраннойв определенном коде программой в соответствии с выбранной технологией крепятся на ра ме 7 с деталями, которая с помощью устройстза 2 перемещения рамы по команде пуск, подаваемой с устройства 1, переносится в первую, определяемую технологией ванну 5.Здесь в зависимости от времени выдержки 25 устройство перемещения 2 либо расцепляетсяс рамой 7 (при больших выдержках времени), либо остается сцепленным с рамой на все время выдержки, Как в первом, так и во втором случаях возможны разветвления направлений з 0 движения устройства перемещения на любой5 10 15 20 25 30 35 40 45 3позиции, определяемой в каждом конкретном случае технологической программой. Выбор необходимого направления в процессе работы осуществляется взаимодействием определенного программоносителя б с блоком 4, а команды на перемещение устройства 2 по выбранному направлению подаются непосредственно с командного устройства 1 после окончания выдержки времени нахождения детали в данной ванне и освобождения очередной по тех. нологии ванны, находящейся на этом направлении. Начало выдержки времени, длительность, а также свободность очередной ванны определяются бесконтактными программными датчиками,Пусть первая и третья ванны заняты находящимися в них рамами 7 с деталями и укрепленными на них программоносителями б. Программоноситель б, например, в первой ванне дает одно из возможных направлений а, б или в 1 см. чертеж) последующего движения устройства перемещения рамы 2 путем взаимодействия с первым блоком бесконтактных программных датчиков, расположенных на этой ванне. После окончания обработки деталей при выбранном направлении движения с устройства 1 подается команда на перемещение устройства 2, которое осуществляет захват в первой ванне рамы 7 и переносит ее либо во вторую направление в), либо в четвертую ванну направление а). В случае выбора направления б движение устройства перемещения рамы невозможно, так как третья ванна занята (информация о занятости третьей ванны дается программоносителем б, находящимся во взаимодействии с четвертым блоком бесконтактных программных датчиков).Следует отметить, что информация, записанная на программоносителе б, укрепленном на раме 7, находящейся в первой ванне, может совпадать, а может и отличаться от информации программоносителя б третьей ванны. Так, например, согласно первому упомянутому программоносителю б совершается ход по пути б+д, а согласно второму программоносителю б - по пути б+е+к (считается, что перенос 4второго программоносителя был совершен из первой ванны в третью ванну и т. д.).Таким образом, каждый конкретный программоноситель б несет информацию о направлении движения устройства перемещения рамы из ванны в ванну, о времени нахождения деталей в данной ванне, а также о занятости определенной ванны.Останов устройства 2 на исходной позиции по определенному направлению осуществляется при совпадении сигналов с датчиков д и команд, вырабатываемых устройством 1,Дальнейшие движения устройства 2 совершаются в описанном порядке и включают в себя отработку команд, записанных в определенной последовательности вперед в назад, направо - в середину - влево, вниз, захват или расцепление с рамой, вверх. Предмет изобретения 1, Система программного управления устройством перемещения рамы с деталями, предназначенными для нанесения гальванических покрытий, содержащая устройство формирования команд управления перемещением и датчики истинного положения устройства перемещения рамы, отличающаяся тем, что, с целью упрощения программного управления процессом нанесения гальванических покрытий, в системе установлены блоки бесконтактных программных датчиков технологического процесса, расположенные непосредственно на ванне и параллельно подключенные к устройству формирования команд управления, а также сменные программоносители, размещенные непосредственно на раме с деталями, переносимыми в ванну по заданному технологическому циклу,2. Система по п. 1, отличающаяся тем, что в ней устройство перемещения рамы с покрываемыми деталями связано с устройством формирования команд управления через датчики истинного положения, установленные на устройстве перемещения и подключенные ко входу устройства формирования команд управления перемещением.312241 Составитель В. К. Иванов Техред Е. Борисова Корректор О, С. Зайцева Редактор В. С. Левятов Типография, пр. Сапунова, 2 Заказ 2761/17 Изд. Уе 1141 Тираж 473 ПодписноеЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква, Ж, Раушская наб., д. 4/5
СмотретьЗаявка
1225679
Новосибирский авиационный завод имени В. П. Чкалова
Д. Т. Палагин, Ю. А. Новичков, В. Т. Кучумов, А. Л. Коган, Г. М. Чеп касов, Д. В. Анисимов, В. К. Журенков, В. И. Жданов, В. С. Слуев
МПК / Метки
МПК: G05B 19/02
Метки: программного, устройством
Опубликовано: 01.01.1971
Код ссылки
<a href="https://patents.su/3-312241-sistema-programmnogo-upravleniya-ustrojjstvom.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления устройством</a>
Устройство для перемещения и переориентации деталей в автоматической линии

Номер патента: 1742031
Опубликовано: 23.06.1992
МПК: B23Q 7/00
Метки: автоматической, линии, перемещения, переориентации
...сзади; на фиг.2 - кантователь со штангой в исходном положении после поворота детали, вид спереди; на фиг.З - барабан после поворота детали, вид сзади; на фиг,4 - разрез А - А на фиг.2; на фиг,5 - разрез Б - Б на фиг,1; на фиг,6 - разрез В-В на фиг,1 (при положении штанги в заднем положении, а собачки накинуты на деталь).Устройство для перемещения и переориентации деталей в автоматической линии состоит из основания 1, кантователя, выполненного в виде барабана 2, редуктора.3 для его поворота, выдвижного фиксатора 4, закрепленного на основании 1 и снабженного конечными выключателями.На основании 1 также установлен конечный выключатель 5, контролирующий положение барабана 2. На барабане 2 закреплены на оси 6 с возможностью качания баэирующие...
Устройство для перемещения и ориентирования деталей, имеющих пазы

Номер патента: 1364575
Опубликовано: 07.01.1988
Автор: Маликов
МПК: B65G 47/24
Метки: имеющих, ориентирования, пазы, перемещения
...органа 2 и считывающего ме,ханизма 3 с приводом возвратно-поступательного вертикального перемеще ния в виде пневмоцилиндра 4, размещенного на станине 5. Считывающий механизм 3 управляет реверсивным переключателем 6, соединенным с намагничивающим приспособлением 7 переменной по лярности, расположенным под лотком 1.Считывающий механизм .3 состоит из колодки со щупом 8, который выполнен в виде клина и служит для распознавания положения ферромагнитной,дета. в . 30 ли. 9 с пазом 10.Исполнительный орган 2 выполнен в виде расположенного за считывающим механизмом 3 по ходу перемещения по лотку 1 деталей 9 магнита 11 постоянной полярности, служащего для захвата деталей 9 и подачи в зону. сборки. Детали 9, перемещаясь по лотку 1,...
Устройство для перемещения рам с табачными листьями

Номер патента: 655380
Опубликовано: 05.04.1979
Авторы: Аббасов, Ахмедов, Исаев, Мусаев, Петрий
МПК: A24B 1/02
Метки: листьями, перемещения, рам, табачными
...является возможность регулирования расстояния между рамами.Это д е еостигается тем, что в пр ойстве под рамами разме приводная тележка, а тол жинен, шарнирно укрепле ством стойки и взаимоде ром, также установлениь При этом упор выполненНа фиг. 1 схематично устройство для перемеше ными листьями в сущиль и укреплен на ней посредством сти шарнира 8 с возможностью вза655380 В устройстве имеется приспособление 11 для обеспечения устойчивости движу ния тележки на роликах 12 по рельсам 13, приводной барабан 14 для наматывания и разматывания тяги 15, а также 3 ограничитель 16 для исключения перемещения тележки на боковые стороны.Привод включает электродвигатель 17, муфту 18, редуктор 19 и пульт управле ния.МУстройство работает следующим...
Устройство для перемещения исполнительных органов станков с числовым программным управлением

Номер патента: 975312
Опубликовано: 23.11.1982
МПК: B23Q 5/02
Метки: исполнительных, органов, перемещения, программным, станков, управлением, числовым
...размещен с возможностью осевых установочных перемещений поршень.На фиг. 1 изображено устройст общий вид; на фиг. 2 - разрез А- на фиг; 1; на фиг. 3 - механизм гулирования натяжения лент.Шаговый двигатель 1 муфтой 2 связан с червяком 3, находящимся в за" цеплении с червячным колесом, состощим из двух частей 4 и 5. Одна часть, 4 червячного колеса связана непосредственно с барабаном б, установленным на валу 7, связующем вторую часть 5 червячного колеса с барабаном 8. Барабаны б и.8 несут каждый по гибкому тяговому органу в виде пакета стальных лент барабан 6 - пакет лент 9, барабан 8 - пакет лент 10. Пакеты лент 9 и 10 связаны с исполнительным органом 11 станка носредством механизмов 12 и 13 натяжения лент, каждый из которых состоит из...
Устройство для обработки оптических деталей с асферическими поверхностями

Номер патента: 239071
Опубликовано: 01.01.1969
Автор: Хуснутдинов
МПК: B24B 13/02
Метки: асферическими, оптических, поверхностями
...от шарнирно подвесной шлифовальной головки 6 посредством пантографирующего механизма, состоящего из рычагов 18 и 19,На нижнем конце вертикального вала 16 смонтировано коромысло 20, которое под действием пружинны 21 контактирует своим роликом с боковой поверхностью упора 22, установленного на возвратно-поступательно движущемся столе 23 изделия.Следовательно, в рабочем положении кулачок 7 с одной стороны связан с шарнирно подвесной шлифовальной головкой 6, а с другой - со столом 23 изделия. Такая связь позволяет преобразовать возвратно-поступательное движение стола 23 в качательное движение кулачка 7 вокруг оси вертикального вала 16 и шлифовальной оловки 6 вокруг оси качания 24, В нерабочем положении поворот:кулачкового вала 16...
Предыдущий патент: Поисковое устройство
Следующий патент: Программно-задающее устройство
Случайный патент: Устройство для электрохимических исследований