Автооператороогсоюсная iivri; i-, rcv7v: -: -uq; •, мi.,: .: ui •.i. iuji. -i. iiriir, 11 r-.; •• • -; „ д brjb. iii: .: i-t lt; h. i
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
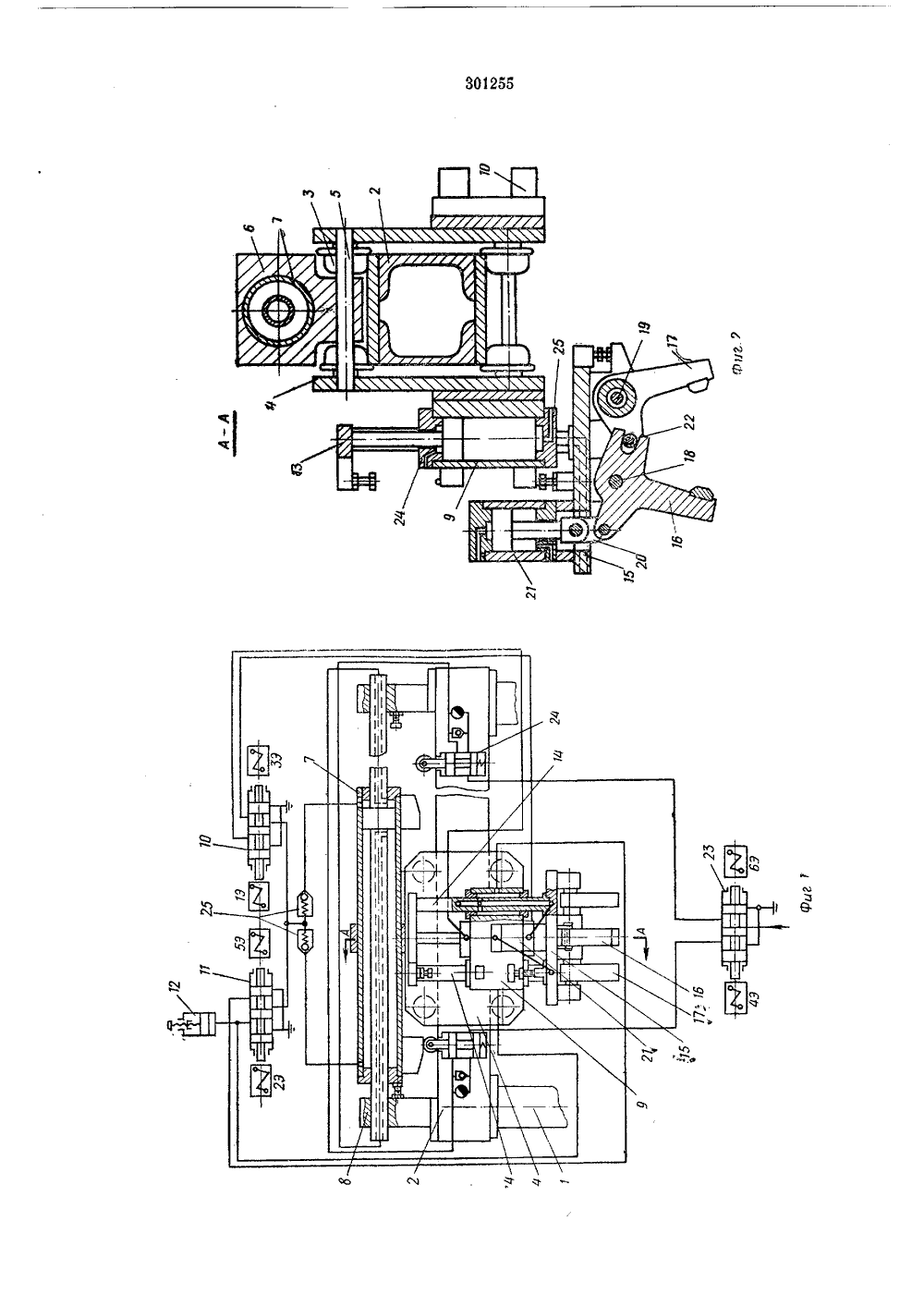
ОП И САНИ Е ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬС 1 ВУ ЗО 255 Союз Советских Социалистических РеспубликЗависимое от авт. свидетельства Ме Заявлено 29,1 Ч.1969 ( 1331357/25-8)с присоединением заявки МеПриоритетОпубликовано 21 ЛЧ.1971. Бюллетень МДата опубликования описания 31 Х.1971 К Комитет ло деламобретеиий и открыт ДК 621,9-229.7лри Совете Министров СССРАвторыизобретения ович и А. И. Захаро Горьковский автомобильный завод аявит р "т-г 1, л С 1 АВТООПЕРАТОР Известны автооператоры, выполненные в виде каретки, перемещающейся по горизонтальной балке и несущей траверсу с автоматическим захватом,Предлагаемый автооператор отличается от известных тем, что в нем рабочая среда подается через цилиндр продольного перемещения каретки и систему обратных клапанов, а к цилиндру привода захвата подводится через корпус автооператора и сверления в направляющих скалах и траверсе.На фиг. 1 изображена пневмокинематическая схема предлагаемого автооператора; на фиг. 2 - автооператор в разрезе.На двух штоках 1 установлена балка 2, По балке на роликах 8 катается каретка 4. Каретка через ось 5 связана с кронштейном 6, жестко сидящим на цилиндре 7 продольного перемещения каретки,Штоки цилиндра жестко закрштейнах 8, которые, в свою от рустановлены на балке.С одной стороны в бобышке каретки крепится корпус 9 автооператора, с другой стороны на каретке установлена плита с золотниками 10 и 11 и реле 12 давления, которые управляют цилиндрами зажима и перемещения захвата. В корпусе 9 смонтирован ци. линдр перемещения захвата, шток которого через поперечину 18 связан с направляющими скалками 14, к противоположным концам которых крепится траверса 15, несущая захват.Скалки 14 ходят в расточках корпуса 9 в направляющих втулках и имеют осевые и радиальные сверления, причем радиальные сверления расположены таким образом, что они на протяжении всего хода штока цилиндра перемещения захвата не выходят за пределы корпуса, т, е. постоянно сообщены с полостями в 10 корпусе,Траверса 15 несет рычаги 16 и 17 захвата,которые поворачиваются на осях 18 и 19 в кронштейнах траверсы. Рычаг 16 захвата через серьги 20 связан со штоком цилиндра 21, 15 который монтируется на траверсе 15. Другоеплечо рычага 16 имеет паз, в который заходит ролик, сидящий на оси 22, закрепленной в коротком плече рычага 17,Золотник 28 через тормозные золотники 24, 20 служащие для торможения при подводе к упорам при продольном перемещении каретки, через осевые и радиальные сверления в штоках соединен с полостями цилиндра продольного перемещения, которые, в свою очередь, 25 соединены через отводы в цилиндре и системуобратных клапанов 25 с линией питания золотников 10 и 11. Золотник 10 своими отводами через крышки соединен с полостями цилиндра перемещения захвата; золотник 11 30 своими отводами соединен с полостями в кор5 ю 15 го г 5 зо 40 45 50 пусе и далее через радиальные и осевые сверления в скалках 14 и сверления в траверсе 15, а затем трубами с полостями цилиндра 21. Реле давления подсоединено к верхней бесштоковой полости этого цилиндра.На фиг, 1 все механизмы автооператора изображены в исходном положении. Сжатый воздух через золотник 23 и левый шток поступает в левую полость цилиндра 7 и удерживает корпус 9 в левом крайнем положении. Далее через левый отвод цилиндра 7 и левый обратный клапан 25 воздух поступает к золотникам 11 и 10. Через золотник 10 воздух поступает в нижнюю полость цилиндраперемещения захвата и удерживает захват в верхнем положении. Через золотник 11 воздух поступает к правой полости корпуса 9, правую скалку 14, правое сверление в траверсе в нижнюю полость цилиндра 21 и держит захват разжатым,При поступлении сигнала захватить деталь включается электромагнит 1 Э золотника 10 и перебрасывает его вправо. Верхняя полость цилиндра перемещения захвата через золотник 23, левую полость цилиндра 7, левый клапан 25 и золотник 10 сообщается с давлением, а нижняя полость через золотник 10 в с атмосферой,Захват опустится на деталь. В конце хода сработает электрический конечник, включит электромагнит 2 Э золотника 11 и перебросит его вправо, Воздух через золотник 23, левую полость цилиндра 7, левый обратный клапан 2, золотник 11, левую полость корпуса 9, левую скалку 14 и левое сверление в траверсе 15 попадает в верхнюю полость цилиндра 21, нижняя полость которого сообщится с атмосферой через золотник 11. Поршень цилиндра пойдет вниз, повернет против часовой стрелки рычаг 1 б, последний через ролик и ось 18 повернет рычаг 17 по часовой стрелке, Произойдет зажим детали. В конце зажима возрастет давление, сработает реле давления 12, включит электромагнит 3 Э, золотника 10 и поднимет захват с деталью,В конце хода сработает электрический конечник и включит электромагнит 4 Э золотника 23. Он перебросится вправо и соединит с давлением правую полость цилиндра 7, а левую - с атмосферой. Цилиндр с кареткой 4 и захватом с деталью совершит ход вправо до упора. В конце хода кулачок наскочит на.ролик тормозного золотника 24 и утопит его. Произойдет понижение скорости за счет дросселирования воздуха на выходе, и каретка плавно дойдет до упора. В конце хода от электрического конечника сработает электромагнит 1 Э и перебросит вправо золотник 10. Сжатый воздух через золотник 23, теперь уже через правую полость цилиндра 7, правый отвод и правый обратный клапан 25, далее через золотник 10 попадет в верхнюю полость цилиндра перемещения захвата, а нижняя полость соединится с атмосферой. Произойдет опускание захвата с деталью. В конце опускания от электрического конечника включится электромагнит 5 Э. Перебросится влево золотник 11, Воздух через золотник 23, правую полость цилиндра 7, правый клапан 25, золотник 11, правую полость корпуса 9, правую скалку 14, правое сверление в траверсе 15 попадет в нижнюю полость цилиндра 21. Произойдет разжим захвата и деталь останется лежать на новой позиции.В конце хода разжима захвата от электрического конечника сработает электромагнит 3 Э золотника 10. Захват без детали уйдет вверх. В конце хода вверх от электрического конечника сработает электромагнит бЭ, перебросив золотник 23 в левое крайнее положение. Цилиндр 7 с кареткой и захватом совершит ход влево до упора в исходное положение. Предмет изобретения 1. Автооператор, выполненный в виде каретки, перемещаемой по балке первым гидроцилиндром, управляемым золотниками, и снабженной траверсой, несущей захват, перемещаемый вторым гидроцилиндром, отличающийся тем, что, с целью упрощения конструкции, золотник управления первым гидроцилиндром через свои полости, дополнительные отводы и систему обратных клапанов соединен с линией питания золотников управления вторым гидроцилиндром.2, Автооператор по п. 1, отличающийся тем, что золотник управления вторым гидроцилиндром соединен через полости в корпусе каретки и каналы в управляющих скалках и траверсе с золотником управления гидроцилиндром зажима - разжима захвата,
СмотретьЗаявка
1331357
Б. С. Синовии, А. И. Захаров Горьковский автомобильный завод
МПК / Метки
МПК: B23Q 7/04
Метки: brjb, iiriir, iivri, iuji, i••, rcv7v, автооператороогсоюсная, м.и
Опубликовано: 01.01.1971
Код ссылки
<a href="https://patents.su/3-301255-avtooperatoroogsoyusnaya-iivri-i-rcv7v-uq-mi-ui-i-iuji-i-iiriir-11-r-d-brjb-iii-i-t-lt-h-i.html" target="_blank" rel="follow" title="База патентов СССР">Автооператороогсоюсная iivri; i-, rcv7v: -: -uq; •, мi.,: .: ui •.i. iuji. -i. iiriir, 11 r-.; •• • -; „ д brjb. iii: .: i-t lt; h. i</a>
Устройство для перемещения концов ленты

Номер патента: 876511
Опубликовано: 30.10.1981
Авторы: Галухина, Коряк, Кузьмин, Холтобин
МПК: B65G 15/30
Метки: концов, ленты, перемещения
...2. Зажимы состоят иэ П-образных в поперечном сечении корпусов 3 с наклонными в продольном направлении верхними внутренними поверхностями. Эти поверхности взаимодействуют с прямоугольнымив сечении клиньями 4. Каждый клин на конце меньшего сечения выполнен с отверстием 15 под болт 5, удерживающий серьгу б, черезконцевое отверстие 7 которой, клин 4 соединен с одним из концов тросового стро.па 1. К верхней вертикальной внутренней поверхности корпуса 3 на болтах 8 укреплена ограничивающая смещение клина 4 фф фиксирующая планка 9.Устройство работает следующим обраПодлежащая натяжению на смонтнро. ванный ленточный конвейер лента 2 протягнвается через прнводсой н натяжной барабаны, ролнкоопоры с помощьв тросового стропа 1, концы которого,...
Устройство для перемещения концов движущегося раската

Номер патента: 269130
Опубликовано: 01.01.1970
Авторы: Астахов, Зая, Фидлер, Филин, Шумков
МПК: B21B 39/14
Метки: движущегося, концов, перемещения, раската
...вращения роликов пересекаются между собой, а их рабочие поверхности в нейтральном положении рамы расположены ниже рабочей поверхности роликов рольганга.На фиг, 1 изображено предл5 ройство, общий вид; на фиг.стрелке А на фиг. 1.Устройство устанавливается мех(ду роликами рольганга 1 и состоит из двух холостых косо расположенных роликов 2, смонтирован ных на общей раме д, жестко сидящей на оси4, установленной на опорах 5 и соединенной с приводом 6 при помощи промежуточного вала и муфт 7.Выходящий раскат из клети транспортиру ется по рольгангу до ножниц, задний конецэтого раската отодвигается к левому борту первым роликом устройства, При остановке раската у ножниц для обрезки переднего конца последующий за ним раскат, минуя ото двинутый...
Траверса для захвата рельсовых звеньев

Номер патента: 895891
Опубликовано: 07.01.1982
Автор: Якимов
МПК: B66C 1/64
Метки: захвата, звеньев, рельсовых, траверса
...Траверса снабжена У-образными зацепами 11 и дисками 12 с пальцами 13, поворотно усЭтановленными соответственно на корпусе 2 и балках 1. Зацепы 11 связаны с пальцами 13. Траверса предназначена для захвата рельсовых звеньев 14.Траверса работает следующим образом.При соприкосновении транспортируемого рельсового звена ,14 с местом укладки появляется слабина в органе 4, и блок 3 с зацепами 11 опускается вниз, в результате чего зацепы 11 входят в контакт с нижними пальцами 13.После окончательной укладки звена 14 на место и последующем натягивании грузового органа 4 для снятия и переноса траверсы на очередное рельсовое звено первоначально поднимается блок 3, увлекая вверх закрепленные на них зацепы 1, по-ворачивая диск и 12 на угол, близкий к...
Устройство для перемещения концов конвейерной ленты

Номер патента: 1546357
Опубликовано: 28.02.1990
МПК: B65G 15/30
Метки: конвейерной, концов, ленты, перемещения
...работ по креплению ленты в устройстве.На фиг. 1 изображено устройство для перемещения концов конвейерной ленты, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - сегменты.Устройство для перемещения концов конейерной ленты состоит из двух плоских опорых боковин 1, между которыми закреплеы (сваркой) верхние и нижние сегменты 2 гаким образом, чтобы лента 3 подходила к важиму 4 волнообразно (за счет снижения сегментов) . Зажим 4 представляет собой 1 теремычку с резьбовыми отверстиями, планку 5, которая прижимается к перемычке 4 Специальными крепежными болтами 6. У Края боковин 1 вварена пластина 7 с проушиНой для крепления тягового каната лебедки. К передней части боковин 1 с помощью болгов прикреплены удлинители 8 и 9, обеспе 14 иваю...
Траверса для захвата рельсовых звеньев

Номер патента: 279684
Опубликовано: 01.01.1970
Авторы: Кокарев, Плеханов, Тарубаров
МПК: E01B 29/02
Метки: захвата, звеньев, рельсовых, траверса
...изобретения является уменьшение габаритных размеров траверсы.Это достигается тем, что балка снабжена установленными на кронштейнах в средней ее части опорными роликами с фиксирующими буртами, а подвесной блок выполнен в виде полого кольца, охватывающего балку и опирающегося на опорные ролики.На фиг, 1 изображена предлагаемая траверса в общем виде; на фиг. 2 - установка подвесного блока,Описываемая траверса представляет собой балку 1 коробчатого сечения, на концах которой смонтированы рельсовые захваты 2. В средней части балки на кронштейнах 3 установлсны опорные ролики 4 с фиксирующими оуртами, на которые опирается подвесной блок, выполненный в виде полого кольца 5, обхватывающего балку, и которые препятст вуют ее продольному...
Предыдущий патент: Блиотека iи. 3. сазонов
Следующий патент: Гравитационный конвейер для заготовок цилиндрической формы
Случайный патент: Способ приготовления рассола хлорида натрия