Устройство для программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1273881
Автор: Фаерман
Текст
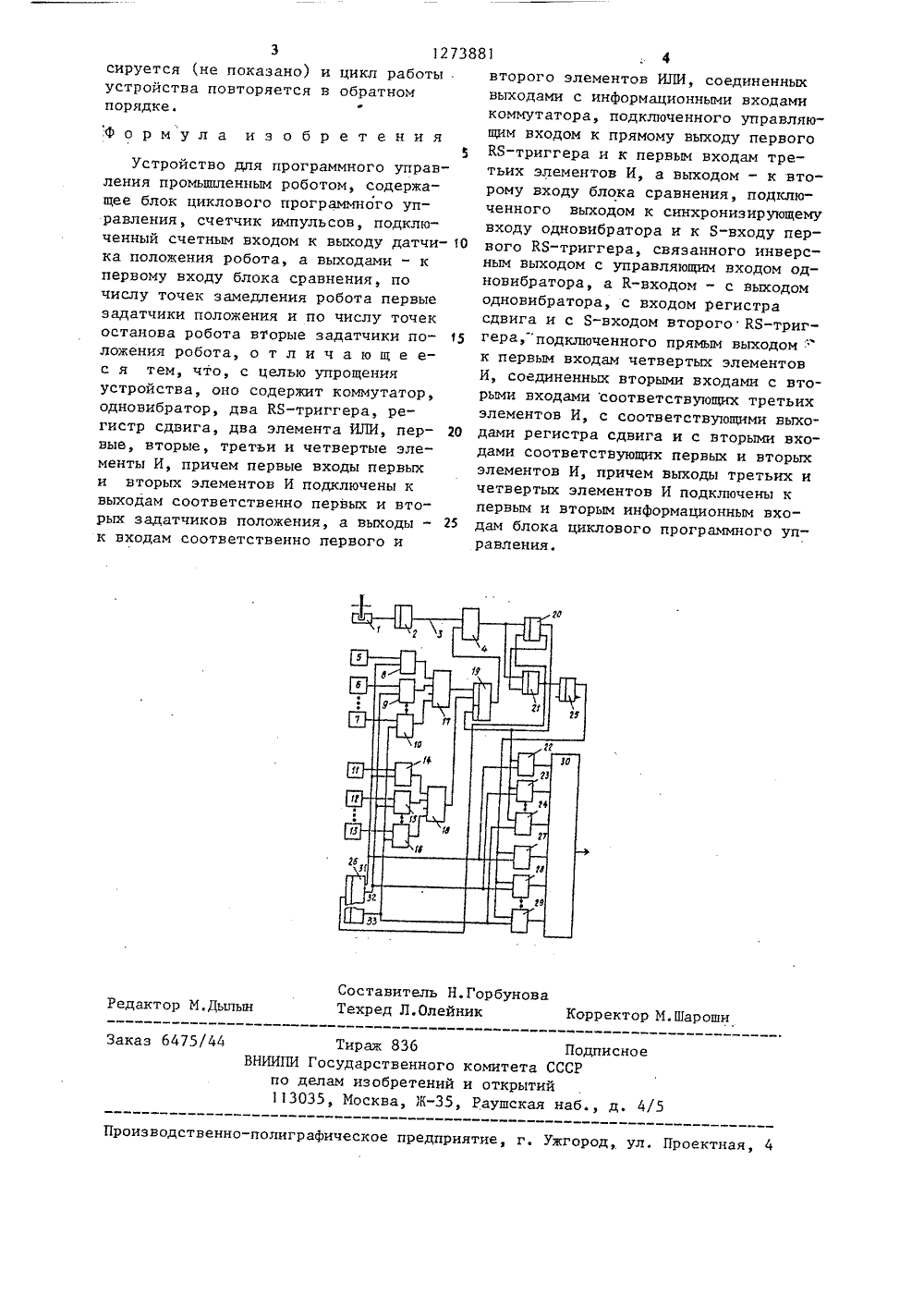
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН 9) (1 51)4 С 05 НОМИТЕТ СССР НИЙ И ОТНРЫТИЙ ОСУДАРСТВЕННЫ ПО ДЕЛАМ ИЗОБР ОПИСАНИЕ ИЗОБРЕТЕНИ то мутатор, два т регистр сдвига раммного управ татора, однови ров, регистра ИЛИ и элементо ггера, одновибрблок циклового ния. Введение к геатора, двух три вига, двух элем соответствующих й позволяет дос ели, 1 ил. нтовфункичь альных свя ставленно К АВТОРСКОМУ СВИДЕТЕЛЬСТ(71) Научно-исследовательский институт специальных способов литья (72) Д.С,Фаерман и Л.Д.фаерман (53) 621.503.55(088,8)(56) Системы управления промьппленными роботами и манипуляторами: Сборник/ Под ред. Е.И.1 Оревич. - Л.: Изд-во ЛГУ, 1980, с, 113.Управляющие системы промьппленных роботов: Сборник/ Под ред, 1 О,Д,Андрианова, Е.И.Оревича, - М.: Машиностроение, 1984, с. 71, рис. 39.Унифицированное устройство циклового программного управления УЦМ, 2556012 ТО, В/О Машприборторг, М.(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРОМЬШЛЕННЫМ РОБОТОМ(57) Изобретение относится к областиробототехники, преимущественно литейных роботов, и может быть использовано для программного управления станочным оборудованием. Цель изобретения -упрощение устройства. Устройство содержитдатчик положения робота, счетчик импульсов, блок сравнения, первыеи вторые задатчики положения, первые,вторые, третьи и четвертые элементыИ, первый и второй элементы ИЛИ, ком 1273881Изобретение относится к робототехнике, преимущественно литейных роботов, и может быть использовано для программного управления станочным оборудованием.Цель изобретения - упрощение устройства.На чертеже представлена Функциональная схема устройства.Устройство содержит датчик 1 положения робота, счетчик 2 импульсов с выходом 3, блок 4 сравнения, первые задатчики 5, 6 и 7 положения, первые элементы И 8, 9 и 10, вторые задатчики 11 , 12 и 13 положения, вторые элементы И 14, 15 и 16, первый элемент ИЛИ 17, второй элемент ИЛИ 8, коммутатор 19, первый Е 8-триггер 20, одновибратор 21, третьи элемента И 22, 23 и 24, второй КЯ-триггер 25, регистр 26 сдвига, четвертые элементы И 27, 28 и 29, блок 30 циклового программного управления, выходы 31, 32 и 33 регистра 26 сдвига.Устройство работает следующим образом.Предположим, что промышленный робот (управляемый модуль) находится в исходном положении, Регистр 26 сдвига также находится в исходном положении, па его выхоце 31 присутствует сигнал высокого уровня. Триггеры 20 и 25 сброшены в нуль, Оператором на пульте управления с помощью задатчиков (останова) 11-13 установлены числа, соответствующие величине пути перемещения робота между точками позиционирования. С помощью задатчиков (замедления) 5-7 установлены числа, соответствующие величине пути замедления перед остановом с целью повышения точности позиционирования и плавности останова.Выход 31 регистра 26 сдвига соединен с входами элементов И 8, 14,22 и 27 аПоскольку триггер 20 сброшен, на его инверсном выходе присутствует сигнал высокого уровня, который запирает одновибратор 21 и устанавливает коммутатор 19 таким образом, что он подключает к входу блока 4 сравнения через элемент ИЛИ 17 задатчик 5 замедления.При перемещении робота от команд блока 30 циклового программного управления датчик 1 положения робота начинает выдавать импульсы, число1 О которых пропорционально пути его перемещения. Эти импульсы поступают насчетчик 2, и когда число, накопленное счетчиком 2, станет равным числу, набранному на задатчике 5, на выходе блока 4 сравнения появляется импульс, который включает триггер 20. Состояние одновибратора 21 не изменяется, поскольку в момент прихода импульсаот блока 4 сравнения он бып запертинверсным выходом триггера 20. С прямого выхода триггера 20 сигнал высокого уровня поступает на элементы И 22-24. Поскольку на обоих входахэлемента И 22 появляются сигналы, то появится сигнал высокого уровня и наего выходе. Этот сигнал поступает на вход блока 30 циклового программного управления, соответствующий команде 20 25 30 35 40 45 50 55 перехода робота на замедленное перемещение. Одновременно выход триггера 20 переключает коммутатор 19 так, что к входу блока 4 сравнения подключается задатчик 11 останова, Робот продолжает перемещение на замедленной скорости до тех пор, пока число, накопленное счетчиком 2, станет равным числу, заданному задатчиком 11, на выходе блока 4 сравнения вновь появляется импульсЭтот импульс, запускает одновибратор 21, который включает триггер (останова) 25, сбрасывает триггер (замедления) 20 и сдвигает инФормацию регистра сдвига 26 на один шаг. Сигнал с его выхода 31 исчезает, а на выходе 32 появляется, Этим сигналом 32 подключается следующая пара задатчиков 6 и 12, следующая пара элементов И 23 и 28, При отключении триггера (замедления) 20 сигнал замедления с входа. блока 30 циклового программного управления исчезает, Триггер (останова) 25 подготавливает элементы И 27-29. На элементе И 28 сигналы оказываются на обоих входах. С выхода элемента И 28 сигнал высокого уровня подается на вход блока 30 циклового программного управления, соответствующий останову в следующей точке. После останова робота триггер 25 сбрасывается (не показано) и устройство вновь готово выдать сигналы замедления и останова при прохождении пути, заданного задатчиками 7 и 12.При перемещении робота в обратном направлении регистр 26 сдвига ревер1273881 3 сируется (не показано) устройства повторяется порядке. и цикл работы,в обратном Составитель Н.ГорбуноваТехред Л,Олейник Корректор М.Шароши Редакт тын Тираж 836Государственного кделам изобретений и035, Москва, )К,Заказ 6475/44 Подпиомитета СССРоткрытий б., д. 4/ шская роизводственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,Формула изобретения5Устройство для программного управления промышленным роботом, содержащее блок циклового программного управления, счетчик импульсов, подключенный счетным входом к выходу датчи О ка положения робота, а выходами - к первому входу блока сравнения, по числу точек замедления робота первые задатчики положения и по числу точек останова робота вторые задатчики по ложения робота, о т л и ч а ю щ е ес я тем, что, с целью упрощения устройства, оно содержит коммутатор, одновибратор, два КБ-триггера, регистр сдвига, два элемента ИЛИ, пер выв, вторые, третьи и четвертые элементы И, причем первые входы первых и вторых элементов И подключены к выходам соответственно первых и вторых задатчиков положения, а выходы - 25 к входам соответственно первого и второго элементов ИЛИ, соединенныхвыходами с информационными входамикоммутатора, подключенного управляющим входом к прямому выходу первогоКЯ-триггера и к первым входам третьих элементов И, а выходом - к второму входу блока сравнения, подключенного выходом к синхронизирующемувходу одновибратора и к Б-входу первого КЯ-триггера, связанного инверсным выходом с управляющим входом одновибратора, а К-входом - с выходомодновибратора, с входом регистрасдвига и с Я-входом второго КБ-триггера,подключенного прямым выходомк первым входам четвертых элементовИ, соединенных вторыми входами с вторыми входами соответствующих третьихэлементов И, с соответствующими выходами регистра сдвига и с вторыми входами соответствующих первых и вторыхэлементов И, причем выходы третьих ичетвертых элементов И подключены кпервым и вторым информационным входам блока циклового программного управления.
СмотретьЗаявка
3805845, 24.10.1984
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ СПЕЦИАЛЬНЫХ СПОСОБОВ ЛИТЬЯ
ФАЕРМАН ДАВИД САМУИЛОВИЧ, ФАЕРМАН ЛЕОНИД ДАВИДОВИЧ
МПК / Метки
МПК: G05B 19/18
Метки: программного, промышленным, роботом
Опубликовано: 30.11.1986
Код ссылки
<a href="https://patents.su/3-1273881-ustrojjstvo-dlya-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления промышленным роботом</a>
Устройство программного управления роботами гальванической линии

Номер патента: 1124250
Опубликовано: 15.11.1984
Авторы: Лукьянец, Синица, Шуклин
МПК: G05B 19/418
Метки: гальванической, линии, программного, роботами
...13 сравнения (фиг. 2) состоит из дешифратора 23 .адреса, нормали- затора 24 уровня входных сигналов, узла 25 опроса состояния датчиков и элемента И 26, Блок 14 сравнения (Фиг, 3) включает в себя вычитающий счетчик 27, элемент И 28, дешифратор 29 индикации и элемент НЕ 30.Формирователь 3 адреса команд (фиг. 4) состоит из триггера 31, элемейФаИ 32, элемента ИЛИ 33, формирователей 34 и 35, элемента 36 задержки и усилителя 37.Блок 5 постоянной памяти (фиг. 5) включает в себя дешифраторы 38 и 39, элементы И 40, 41 и 42 с повышенной нагрузочной способностью и постоянное запоминающее устройство 43.Блок 7 выделения синхронизирующей команды (фиг. 6) состоит из .схемы 44 сравнения кодов, регистра 45, усилителя 46 и полупостоянного...
Генератор случайных чисел
Номер патента: 798770
Опубликовано: 23.01.1981
Авторы: Солдатов, Спица, Шульгинов
МПК: G06F 1/02
Метки: генератор, случайных, чисел
...1 одиночных и случайных импульсов подклочен к входам счетчиков 4 и к входам делителей 2 к управляющим входам которых подсоединены блоки 5 задания чисел. Выходы счетчиков 4 и блохов б памяти подключены к входам сумматоров 7. Входы блока 8 сравнения соединены с выходами делителей 2, а его выходы подсоединены к входам де" шифратора 9, выходы последнего подключены к отдельным входам сумматоров 7, а один его выход соединен с триг гером 10, выход которого подсоединен к входу блока 8 сравнения, а другой вход соединен с шиной фзапрос. К входам регистра 11 памяти подключены выходы сумматоров 7. 65 Генератор случайных чисел с заданным законом распределения работает следующим образом.Заданная функция плотности распределения вероятностей...
Устройство для определения максимального числа

Номер патента: 1089574
Опубликовано: 30.04.1984
Автор: Березкин
МПК: G06F 7/02
Метки: максимального, числа
...выработки новых сигналов в блоках 17 сравнения в схемах фиксации максимального числа не произошло .подключение к магистрали 3 более одного числа. Сигнал с выхода задержки 26 поступает на вход элемента И 18. В случае отсутствия сигнала в шине проводного ИЛИ на второй вход элемента И 18 поступает единичный сигнал. Тогда запускается триггер 22 (сигнала сброса на нем в этом случае нет), сигнал с которого, проходя через элемент ИЛИ 20 на управляющие входы группы элементов И 16, обеспечивает прохождение иаксимального числа (сигналов в шине . проводного ИЛИ нет) в магистраль 3 до появления на входах устройства большего числа. При появлении боль- щего числа на одном из входов устройства 4, 42, , 4 м сигнал в шине проводного ИЛИ сбросит триггер...
Устройство для контроля аналого-цифровых преобразователей

Номер патента: 1531217
Опубликовано: 23.12.1989
Авторы: Банченко, Зурканаев, Смирнов
МПК: H03M 1/10
Метки: аналого-цифровых, преобразователей
...установленного допуска вкаждом из двух циклов будет зафиксирован сбой, второй разряд счетчика20 сбоев устанавливается при этом вединичное состояние и сбрасываеттриггер 12 останова, закрывая темсамым первый селектор 2 и открываявторой селектор 3Второй селектор3, реализуемый, например, на БИСК 589 ХЛ 4, включенной в режиме формирования пачки заданного числа импульсон, пропускает на вычитакящий входреверсивного счетчика 4 такое количество счетных импульсов, что содержимое реверсивного счетчика 4 уменьшается на число тактов задержкисигнала в цепи образцовый цифроаналоговый преобразователь 7 - поверяемый аналого-цифровой преобраэовательвычитатель 6 кодов - блок 10 сравнения кодов - триггер 19 сбоя - счетчик 20 сбоев - коммутатор 21 - триггер...
Многолучевое регистрирующее устройство

Номер патента: 1561077
Опубликовано: 30.04.1990
МПК: G06K 15/14
Метки: многолучевое, регистрирующее
...к работе, этап калибровки завершенПри начале сеанса связи, когда к входу коммутатора 16 подключается канал связи, взаимосвязанный с входом синхронизации, предста:вляющий собой поток мультиплексированных видеоданных и данных о номере видеоканала, внешнее устройство через соответствующие шины блока 18 устанавливает на его первом управляющем выходе уровень лсгической единицы, а на выходах второй группы - сигналы управления, переводящие сумматоры 14 в режим суммирования с накоглением, При этом на выходах коммутатора 16 выставляются коды демультиплексиронанных видеоданных с второго входа, синхронизированные сигналом, поступающим на первый вход с третьего ныхода блока 17.Все триггеры 10 устанавливаются в "1 сигналом, поступающим на вторые...
Предыдущий патент: Устройство для программного управления автооператором гальванической линии
Следующий патент: Система для программного управления
Случайный патент: Автоматизированный комплекс для штамповки деталей из плоского материала