Устройство программного управления роботами гальванической линии
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
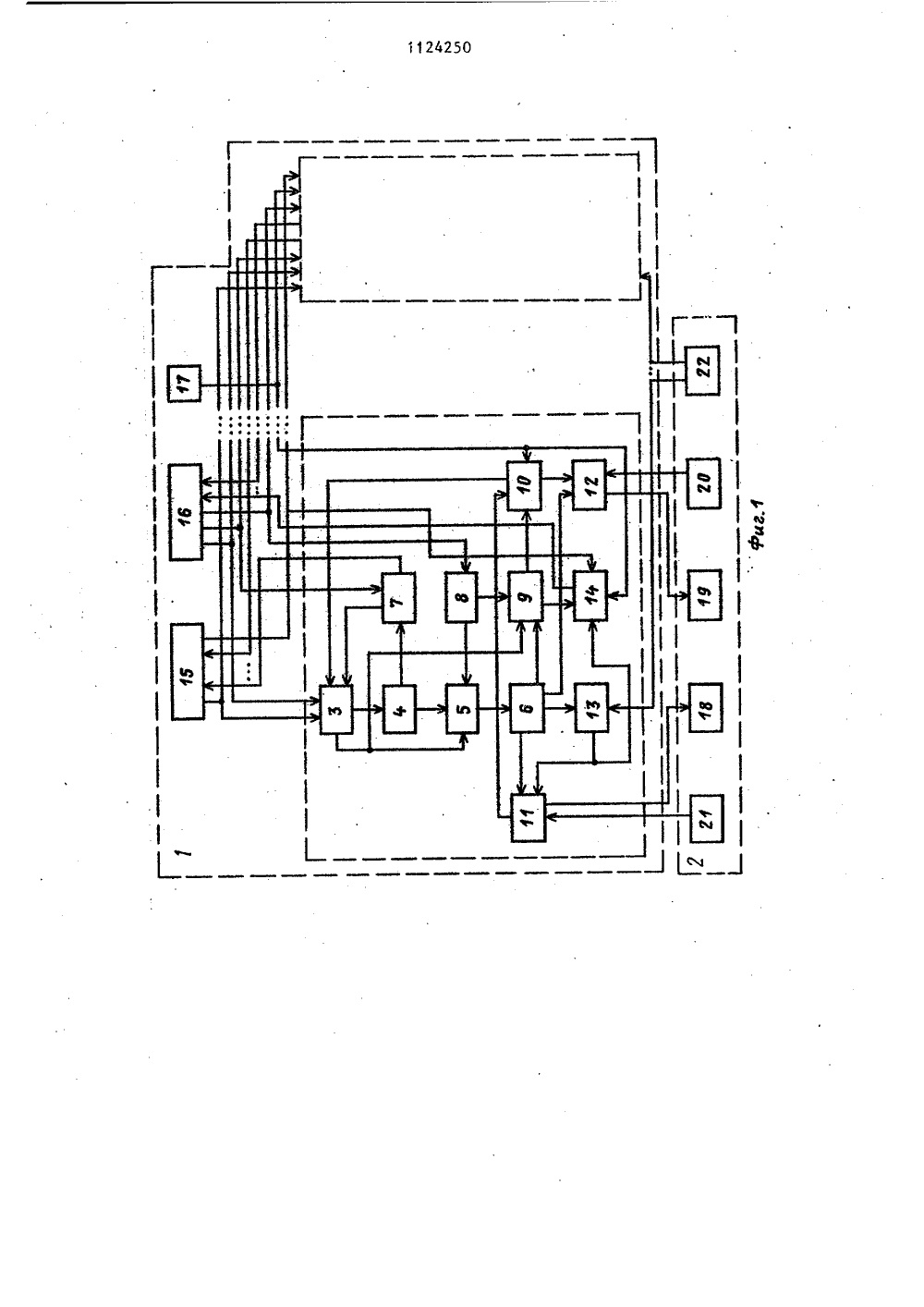
СОЮЗ СО 8 ЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК зв Й 05 В 19/18 ОПИСАНИЕ ИЗОБРЕТЕНИЯН АВТОРСКОЮ У СВИДЕТЕЛЬСТВУ ГОСУДАРСТ 8 ЕННЫЙ КОМИТЕТ СССРПО ДЕДАМ ИЗОБРЕТЕНИЙ И ОТКРЬПЪ 9(71) Минский радиотехнический институт(56) 1. Авторское свидетельство СССР В 636585, кл. 6 05 В 19/18, 1978.2. Авторское свидетельство СССР В 654699, кл. С 25 Э 21/12 1978 (прототип).(54) (57) УСТРОЙСТВО ПРОГРАММНОГОУПРАВЛЕНИЯ РОБОТАМИ ГАЛЬВАНИЧЕСКИХЛИНИЙ, содержащее блок формированиясигнала окончания цикла, пульт управления, датчик времени и по числуроботов линии Н каналов, каждый изкоторых состоит из формирователя адреса команд, соединенного первымкомандным входом с первым команднымвыходом блока формирования сигналаокончания цикла, вторым команднымвходом - с первым выходом пультауправления, третьим командным входомс первым выходом блока отработки выдержек времени, четвертым команднымвходом - с первым выходом блока выделения синхрокоманды, командным"выходом - с первым входом счетчикакоманд, стробирующим выходом - спервым входом блока постоянной памяти и с первым входом блока полупостоянной памяти, подключенного вторымвходом к второму выходу коммутаторапрограмм, третьим входом - к первомувыходу регистра команд, первым выходом - к первому входу блока отработкивыдержек времени, связанного вторым,801124250 А входом с датчиком времени, третьимвходом - с первым выходом, блока управления горизонтальным перемещением,а вторым выходом - с первым входомблока управления вертикальным перемещением, соединенного вторым входомс датчиком вертикального положения,выходом - с исполнительным механизмом вертикального перемещения, атретьим входом - с вторым выходомрегистра команд, подключенного входом к выходу блока постоянной памяти,третьим выходом - к первому входублока управления горизонтальнымперемещением, соединенного вторымвходом с датчиком горизонтального Еположения, а вторым выхОдом - сисполнительным механизмом горизонталь-Щного перемещения, причем первый выход счетчика команд подключен к второму входу блока постоянной памяти, да второй выход - к первому входублока выделения синхрокоманды, соединенного вторым выходом с входом блока формирования сигнала окончанияцикла, а вторым входом - с вторымвыходом пульта управления, подключенного третьим вьиодом к входу коммутатора программ, " вязанного первымвыходом. с третьим входом блока постоянной памяти, о т л и ч а ю щ е е с ятем, что, с целью повьпдения надежности устройства, в него введеныдатчик загрузки рабочих позиций и в ф,каждый канал первый блок сравненияи второй блок сравнения, подключенный первым информационным входом кчетвертому выходу регистра команд,вторгм информационным входом - кдатчикам загрузки рабочих позиций,а выходом - к третьему выходу блока1124250 Ел дл НИИПИ Заказ 8277/35 Тираж 841 Подлисное е еееве евв ефилиал ППП "Патент", г.Уагород, ул.Проевтная1124250 управления горизонтальным перемещением и к первому управляющему входу первого блока сравнения, соединенного первым информационным входом с вторым выходом блока полупостоянной памяти, вторый управляющим входом -Изобретение относится к дискретным автоматическим устройствам, управляющим технологическими процессами, и может использоваться для управления комплексами роботов-ма нипуляторов, автоматическими линиямн автооператорного типа для нанесения покрытий, а также в автоматизированных системах автоматно-механического и сборочного производства. 10Известно устройство, содержащее блок датчиков перемещения, блок ввода программы, регистр адреса, коммутатор, блок сравнения, блоки управления горизонтальным и вертикаль ным перемещениями, блок исполнительных механизмов, счетчик времени, блк задания выдержек времени, блок контроля движения по времени и блок управления Я .20Однако в указанном. устройстве, во-первых, отсутствует связь между фактической загрузкой отдельных позиций и кодом адреса горизонтального перемещения, выдаваемым блоком 25 ввода программы, что приводит к опас" ности опускания транспортируемой подвески на уже занятую рабочую позицию при случайном сбое программы, во-вторых, затруднена реализация ЗО управления комплексом роботов-манипуляторов вследствие высокой степени централизации управления, что приводит к остановке всей линии при любом случайном программном сбое. Наиболее близким к предлагаемомуявляется устройство программногоуправления роботами гальваническойлинии, содержащее по числу роботовблоки управления, блоки анализа вы 40полнения команд, счетчики команд,регистры адреса перемещения роботов,коммутаторы программы, блоки отработки выдержек времени, блоки управления с вторым выходом блока формированиясигнала окончания цикла, вторым информационным входом - с выходомдатчика времени, а выходом - с входомпульта управления,считыванием команд, блоки постоянной памяти технологических маршрутов,блоки полупостоянной памяти технологических выдержек времени, блоки выделения синхронизирующей команды программ управления роботами и общие для всех роботов пульт управления, датчик точного времени, блок анализа выполнения программы технологического процесса и блок контроля ритма выхода подвесок с деталями 2 .Недостатками данного устройства являются, во-первых, воэможность возникновения аварий оборудования вследствие отсутствия связи между ходом отработки программы технологического процесса и информацией о фактической загрузке рабочих позиций,что может привести в результате программного сбоя к необходимости поместить подвеску на уже занятую рабо" чую позицию, во-вторых, отсутствие информации у оператора о возможном времени устранения возникшего сбоя на каждом роботе, что при автономном устранении сбоя без остановки технологической линии, в свою очередь, может привести к столкновению соседних роботов и полной остановке всей технологической линии и, как следствие, к браку всех обрабатываемых в данный момент на технологической линии заготовок. Цель изобретения - повышение надежности устройства.Поставленная цель достигается тем, что в устройство программного управления роботами гальванических линий, содержащее блок формирования сигнала окончания цикла, пульт управления, датчик времени и по числу роботов линии 1 каналов, каждый иэ которых состоит из формирователя адреса команд, соединенного первымкомандным входом с первым команднымвыходом блока формирования сигналаокончания цикла, вторым команднымвходом - с первым выходом пультауправления, третьим командным входом - с первым выходом блока отработки выдержек времени, четвертымкомандным входом - с первым: выходомблока, выделения синхрокоманды,командным выходом - с первым входом 1 Осчетчика команд, стробирующим выходом - с первым входом блока постоянной памяти и с первым входом блокаполупостоянной памяти, подключенноговторым входом к второму выходу коммутатора программ, третьим входом - кпервому выходу регистра команд, первым выходом - к первому входу блокаотработки выдержек времени, связанного вторым водом с датчиком времени,третьим входом - с первым выходомблока управления горизонтальным перемещением, а вторым выходом - с первым входом блока управления вертикальным перемещением, соединенного вто"рым входом с датчиком вертикальногоположения, выходом - с исполнительныммеханизмом вертикального перемещения,а третьим входом - с вторым выходомрегистра команд, подключенного входомк выходу блока постоянной памяти,третьим выходом - к первому входублока управления горизональным перемещением, соединенного вторым входомс датчиком горизонтального положения,а вторым выходом - с исполнительным.механизмом горизонтального перемещения; причем первый выход счетчикакоманд подключен к второму входу блока постоянной памяти, а второй выход -к первому входу блоха выделения синх рокоманды, соединенного вторым выходом с входом блока формирования сигнала окончания цикла, а вторым вхо"дом - с вторым выходом пульта управления, подключенного третьим выходом 45к входу коммутатора программ, связанного первым выходом с третьим входомблока постоянной памяти, введены датчик загрузки рабочих позиций и вкаждый канал первый блок сравнения и 50второй блок сравнения, подключенныйпервым информационным входом к четвертому выходу регистра команд, вторым.информационным входом - к датчикамзагрузки рабочих позиций, а выходом - 55к третьему выходу блока управлениягоризонтальным перемещением и к первому управляющему входу йервого блока сравнения, соединенного первым информационным входом с вторым выходом блока полупостоянной памяти, вторым управляющим входом - с вторым выходом блока Формирования сигнала окончания цикла, вторым информационным входом - с выходом датчика времени, а выходом - с входом пульта управления.На Фиг. 1 представлена блок-схема устройства программного управления роботами гальванических линий; на фиг. 2 - скема блока сравнения; на фиг. 3 - схема блока анализа времени .сбоя; на фиг, 4 - схема формирователя адреса команд; на Фиг. 5 - схема блока постоянной памяти; на фиг. 6 - схема блока выделения синхрокоманды; на фиг. 7 - схема блока полу- постоянной памяти; на фиг. 8 - схема блока отработки выдержек времени.Устройство содержит узел 1 управления (фиг. 1) и узел 2 связи с объектом, которым является гальваническая линия.Узел 1 управления содержит по числу роботов Формирователи 3 адреса команд, счетчики 4 команд, блоки 5 постоянной памяти, регистры 6 команд, блоки 7 выделения синхрокоманды, коммутаторы 8 программ, блоки 9 полу- постоянной памяти, блоки 10 отработки выдержек времени, блоки 11 управления горизонтальным перемещением, блоки 12 управления вертикальным пеперемещением, вторые блоки 13 сравнения," первые блоки 14 сравнения и общие для всех роботов блок 15 формирования сигнала окончания цикла, пульт 16 управления и датчик 17 времени. Узел 2 связи с объектом содержит по числу роботов исполнительные механизмы 18 горизонтального перемещения, исполнительные механизмы 19 вертикального перемещения, датчики 20 вертикального положения, датчики 21 горизонтального положения и общие для всех роботов датчики 22 загрузки рабочих позиций.Блок 13 сравнения (фиг. 2) состоит из дешифратора 23 .адреса, нормали- затора 24 уровня входных сигналов, узла 25 опроса состояния датчиков и элемента И 26, Блок 14 сравнения (Фиг, 3) включает в себя вычитающий счетчик 27, элемент И 28, дешифратор 29 индикации и элемент НЕ 30.Формирователь 3 адреса команд (фиг. 4) состоит из триггера 31, элемейФаИ 32, элемента ИЛИ 33, формирователей 34 и 35, элемента 36 задержки и усилителя 37.Блок 5 постоянной памяти (фиг. 5) включает в себя дешифраторы 38 и 39, элементы И 40, 41 и 42 с повышенной нагрузочной способностью и постоянное запоминающее устройство 43.Блок 7 выделения синхронизирующей команды (фиг. 6) состоит из .схемы 44 сравнения кодов, регистра 45, усилителя 46 и полупостоянного запоминающего устройства 47 синхрокоманд на программных переключателях. 10 Блок 9 полупостоянной памяти(фиг. 7) состоит из дешифраторов 48и 49, запоминающих элементов 50 и 51на программных переключателях, элемента И 52 с повышенной нагрузочнойспособностью, элемента ИЛИ 53, Формирователя 54 и регистра 55.Блок 10 отработки выдержек времени (фиг. 8) включает в себя элементыИ 56, 57 и 58 вычитающий счетчик 59 25и элементы ИЛИ 60 и 61,Блок 15 анйлиза выполнения программы состоит из элемента И и формирователя. Исполнительные механизмы18 и 19 состоят каждый из асинхронного двигателя и тиристорных симметричных ключей. Датчик 17 временипредставляет собой генератор секундных импульсов; узел 25 опроса состояния датчиков состоит из двухэлементов И и элемента ИЛИ; узел 2835управления представляет собой элемент И, а узел 30 управления индикацией - элемент НЕ,Узел 1 управления предназначен для40управления комплексом роботов. Узел 2связи с объектом выполняет Функцииреализации команд, формируемых узлом1 управления, и сброса необходимойинформации, Формирователь 3 выпоЛ 45няет функции управления занесениеминформации в счетчик 4 команд и стробирования моментов считывания технологических команд и временных выдержек иэ блока 5 постоянной памяти иблока 9 полупостоянной памяти соот 50ветственно, Счетчик 4 команд определяет адрес в блоке 5 постоянной памяти, по которому хранится информация, соответствующая требуемой технологической команде. Блок 5 постоянной памяти осуществляет Функцию хранения библиотеки программ технологических маршрутов горизонтального перемещения робота и выполняемых на каждой из рабочих позиций действий.Регистр 6 команд служит,.для хранения информации, соответствующей одному шагу выбранного технологического процесса. Блок 7 выделения синхрокоманды служит для формирования сигнала о выполнении цикла программы выбранного технологического процесса данным роботом. Коммутатор 8 программ предназначен для выбора из библиотеки программ технологи-ческих процессов программы, соответствующей требуемому технологическому процессу, и управляет работой блока 5 постоянной памяти и блока 9 полу- постоянной памяти в части определения области памяти, где размещается тре - буемая программа. Блок 9 полупостоянной памяти выполняет функцию хранения информации выдержек времени в движении роботов на каждой из рабочих позиций для всех технологических процессов. Блок 10 отработки выдержек времени управляет работой блока 12 управления вертикальным перемещением в части организации необходимых временных задержек следования команд.Блок 11 управления горизонтальным перемещением осуществляет Функцию обработки информации о требуемом и действительном положении робота и выработки управляющих команд исполнительному механизму 18 горизонтального перемещения. Блок 12 управления вертикальным перемещениемобрабатывает информацию о характеретребуемых действий на каждой рабочейпозиции и управляет исполнительными механизмами 19 вертикального перемещения. Блок 13 сравнения (блок анализа состояния адресуемой позиции) обрабатывает информацию об адресе перемещения робота, характере выполняемых действий и состоянии соответствующих датчиков 22 загрузки рабочих позиций и управляет работой блока 11 управления горизонтапьным перемещением и блока 14 сравнения. Блок 14 сравнения выполняет функцию информирования оператора через пульт .16 управления о появлении сбоя и о времени, имеющемся в распоряжении оператора для устранения сбоя, в течение которого нормальный ход технологического процесса не будетнарушен, т.е. качество покрытия будет удовлетворительным и соседние роботы не столкнутся.Блок 15 формирования сигнала окончания цикла служит для опреде ления момента выполнения программы выборочного технологического процесса для одного цикла обработки деталей всеми роботами. Пульт 16 управления предназначен для обмена информацией между оператором и системой, Датчик 17 времени служит для формирования импульсов точного времени,Исполнительный механизм 18 гори-зонтального перемещения осуществляет перемещение робота вдоль технологической линии, исполнительный механизм 19 вертикального перемещения- в вертикальной плоскости, Датчики 20 вертикального положения служат для 20 идентификации положения робота в вертикальной плоскости, датчики 21 горизонтального положения - в гори- зонтальной плоскости. Датчики 22 загрузки рабочих позиций предназначены для определения загрузки рабочих позиций. 30 Устройство работает следующимобразом.Перед началом автоматической работы, в соответствии с выбраннымтехнологическим процессом, оператордолжен разместить на рабочих позициях линии определенное количествотехнологических подвесок, предназначенных для крепления обрабатываемыхзаготовок, и каждый из роботов должен быть помещен на соответствующуюему исходную позицию. Информация отребуемом технологическом процессе40заносится посредством пульта 16управления в коммутатор 8 программы,который позволяет определить в блоке5 постоянной памяти и в блоке 945полупостоянной памяти области памяти,хранящие команды и соответствующиеим временные выдержки, необходимыедля реализации выбранного технологического процесса,Программа работы каждого роботаявляется периодической, состоящей иэнескольких циклов, после выполнениякаждого из которых происходит синхронизация работы всех роботов.Пуск линии в автоматический режимработы осуществляется оператором через пульт 16 управления, В результате. блок 3 инициирует занесение в счетчики 4 команд первой команды программы выбранного технологического процесса, которая считывается из блока 5 постоянной памяти и запоминается в регистре 6 команд. Команда содержит информацию об адресе рабочей позиции горизонтального перемещения робота и о тех действиях вертикального перемещения, которые должны быть выполнены из данной рабочей позиции. Часть информации, записываемой в регистр 6 команд, поступает на вход блока 9 полупостоянной памяти и вместе со стробирующим сигналом блока 3 управляет считыванием из блока 9 . полупостоянной памяти кода требуемых для данной команды временных выдержек, которые запоминаются в блоке 10 отработки выдержек времени. Временные выдержки для каждой команды призваны устранить качание подвески после горизонтального перемещения, обеспечить стекание раствора после выполнения .технологической операции и выполнение самой операции. По этому же сигналу, соответствующему первой команде каждого цикла отрабатываемой программы, из блока 9 полупостоянной памяти в блок 14 сравнения заносится информация, характеризующая допустимый временной интервал за один цикл работы линии для устранения сбоя программы данного робота.В соответствии с адресом горизонтального перемещения и характером выполняемых на рабочей позициидейст- вий вертикального перемещения блок 13 сравнения анализирует возможность отработки заданной команды и, если команда может быть реализована, то своим сигналом разрешает горизонтальное перемещение робота. Блок 11 управления горизонтальным перемещением Формирует сигналы, управляющие положением робота, и после отработки . заданного горизонтального перемещения вьщает сигнал блоку 10 отработки выдержек времени, который разрешает выполнение отдельных действий блоком 12 управления вертикальным перемещением. Блок 12 управления вертикальным перемещением в соответствии с информацией регистра б команды и сигналами блока 10 отработки технологических выдержек времени управляет выполнением действий по вертикальному перемещению робота, и после их завершения блок 10 отработки вы 9 112425 держек времени выдает в блок 3 сигнал о завершении реализации команды, после чего инициируется считывание следующей команды программы.Если команда не может быть реа лиэована вследствие несоответствия состояния адресуемой позиции требу" емому, то блок 13 запрещает работу блока 11 управления горизонтальным перемещением и выдает сигнал блоку 14 10 сравнения, который информирует оператора через пульт 16 управления о сбое и начинает счет времени сбоя, причем на пульт 1 б управления выводится информация о времени, остав шемся для устранения сбоя на данном роботе без нарушения работы всей линии. Если за это заданное время сбой устраняется оператором, то может быть продолжена дальнейшая 20 работа по программе, но состояние блока 14 сравнения соответствует интервалу времени, оставшемуся для устранения очередного сбоя в этом цикле, 25Когда состояние счетчика 4 команд соответствует последней команде цикла, которая является синхронизующей, блок 7 выделения синхрокоманды запрещает блоку 3 считывание очеред- у 0 ной команды и выдает в блок 15 сигнал об окончании цикла. Блок 15 формирования сигнала окончания цикла анализирует поступающие иэ блоков 7 выделения синхронизирующей команды каждого робота сигналы об окончании 10отработки цикла и при их совпадении запрет на работу блока 3 управления считыванием команд и сбрасывает записанную в блоке 14 сравнения информацию о временном интервале, оставшемся для устранения сбоя, тем самым разрешается отработка следующего цикла программы.Предлагаемая система позволяет повысить надежность и долговечность работы оборудования гальванической линии за счет исключения возможности размещения роботами подвесок с обрабатываемыми заготовками на уже занятые рабочие позиции и, как следствие, снизить вероятность появления поломок оборудования; повысить качество получаемых покрытий и снизить объем брака, вызываемого программными сбоями, благодаря оперативному информированию оператора о возможном времени устраннния возникшего сбоя и увеличении этого времени в результате выявления, сбойной ситуации до отработки командш горизонтального перемещения загруженного робота на занятую рабочую позицию, что приводит к повышению производительности линии, а также к улучшению условий отладки программы новых технологических процессов.Предлагаемое устройство можетбыть использовано для управленияроботами в гальванических линияхтипа ИЛГ, ИЛГ1 и АЛГМ и др.1124250 ГР. Р Ф КГЛ ЮЛ ИЯ МГл, ЕШ 1 дл, О МГЛ. 7 КЮ К (апустипм)
СмотретьЗаявка
3601506, 01.06.1983
МИНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
ЛУКЬЯНЕЦ СТЕПАН ВАЛЕРЬЯНОВИЧ, СИНИЦА ЮРИЙ ПАВЛОВИЧ, ШУКЛИН ВЛАДИМИР КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G05B 19/418
Метки: гальванической, линии, программного, роботами
Опубликовано: 15.11.1984
Код ссылки
<a href="https://patents.su/10-1124250-ustrojjstvo-programmnogo-upravleniya-robotami-galvanicheskojj-linii.html" target="_blank" rel="follow" title="База патентов СССР">Устройство программного управления роботами гальванической линии</a>
Устройство для регистрации времени входа и выхода

Номер патента: 875415
Опубликовано: 23.10.1981
Авторы: Баженов, Графенбергер, Матвеев, Чех, Шкроб
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...7 памяти, способный хранить его (один) массив информации. Он хранится здесь до,тех пор, пока 5 4вахтер охраны (иди устройство идентификации) не убедится в соответствиитабельному номеру лица фактически следующего через контроль. По окончанииэФой операции сотрудник охраны (илиустройство идентификадии) замыкаетвторой ключ 8, вследствие чего массивинформации поступает в блок 9 выдачиинформации, и записывается на магнитную ленту. Одновременно на вход блока 11 индикации поступает через второй ключ 8 сигнал переключения, по исполнении которого система возвращается в исходное состояние. Процесс по- .вторяется, как только очередной сотрудник увидит зеленый сигнал блокаиндикацииЧастота следования сотрудников определяется временем их...
Устройство для регистрации времени входа и выхода

Номер патента: 898478
Опубликовано: 15.01.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...17 отображения, блок 18 печати.Блок б управления, блок 8 регистрации, программный блок 12 реализованы на базе микропроцессоров иу 5 перепрограммируемых постоянных запоминающих устройств.При наличии заявки с любого блока 2 считывания, коммутатор 3 последовательно опрашивает и отыскивает блок считывания, в котором содержится код жетона-пропуска. Датчики 1 направления дополняют этот код кодом направления движения (приход на предприятие или уход иэ предприятия). Полученный код через коммута/ тор 3 поступает в приемный регистр 4 и через него в блок 5 контроля кода. Код жетона-пропуска определяет адреса ячеек программного блока 12 и блока 8 регистрации. Если код жетона-пропуска считан верно, то блок б управления считывает код...
Устройство для регистрации времени входа и выхода

Номер патента: 963026
Опубликовано: 30.09.1982
МПК: G07C 9/00
Метки: времени, входа, выхода, регистрации
...впемени входаи выхода содержит датчики.1 направления, 55блок 2 считывания, элементы И 3 и 4, компараторы 5, задатчики 6 адреса, элементы ИЛИ7 и 8, блок 9 контроля кода, блок 1 О управ. ления, счетчик 11 импульсов, блок 12 регист. рации, датчик 13 времени и пульт 4 управления.При наличии заявки с любого блока 2 считывания через первый элемент ИЛИ 7 запускается блок 10 управления, который сЬормирует1код текущего адреса блока 2 считывания и выдает его на компараторы 5. В задатчиках 6 адресов блоков 2 считывания при монтаже устройства заложены их порядковые номера. Комнаратор 5, укоторого поступивший код совпал с кодом задатчика 6 алреса, открывает элементы И 3 и 4. Инфоомация, считываемая с жетона - пропуска, ппедставляет собой...
Устройство для сопряжения группы операционных блоков с общей памятью

Номер патента: 1444790
Опубликовано: 15.12.1988
Автор: Чабуркина
МПК: G06F 13/00
Метки: блоков, группы, общей, операционных, памятью, сопряжения
...5, и сигналы с информационной шины 14 "Адрес второго операнда" (из операционного блока, который задействован в текущей команде - вырабатывается устройством управления операционного блока после инициирования его работы) совпали, следовательно, выбрана та часть коммутатора 5, которая организует связь операционных блоков в текущей группе, и если на входы одного из узлов 40 коммутации второго операнда (количество которых,подключенных к выходу одного элемента 39 сравнения, соответствует общему количеству операционных блоков)поступил сигнал с выхода памяти 4состояний с шины 33, Фиксированиеначала коммутации осуществляется посигналу с шины 32 "Строб приемакоманды" первыми элементами И 42 узла 40 коммутации. второго операнда.Сохранение...
Блок питания для доменной памяти

Номер патента: 1727173
Опубликовано: 15.04.1992
Авторы: Горохов, Драчук, Коновалов
МПК: G11C 11/14
Метки: блок, доменной, памяти, питания
...Ез на его втором входе, и на выходе элемента 17 появляется сигнал единичного уровня, по которому уровень выходного сигнала элемента ИЛ И 18 изменяется с единичного на нулевой, Нулевой сигнал с выхода элемента ИЛИ 18 по второму входу элемен20 25 30 40 секунд), а выходное напряжение Е 1 источ 55 та И 19 запрещает формирование на шине 29 сигнала разрешения обращения к доменной памяти и одновременно переводит диод 23 несимметричного элемента 21 в непроводящее состояние. После отключения диода 23 накопленная в конденсаторе 24 элемента задержки 21 энергия удерживает коммутатор 6 в рабочем состоянии, задерживая отключение питающих доменную память напряжений на шинах 10 и 11 на время, необходимое для окончания незавершенных циклов работы...
Предыдущий патент: Многошпиндельный гайковерт
Следующий патент: Устройство для числового программного управления
Случайный патент: Импульсно-фазовая следящая система