Преобразователь углового положения вала в последовательность импульсов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 781863
Авторы: Гожий, Горбунов, Лекохмахер

Текст
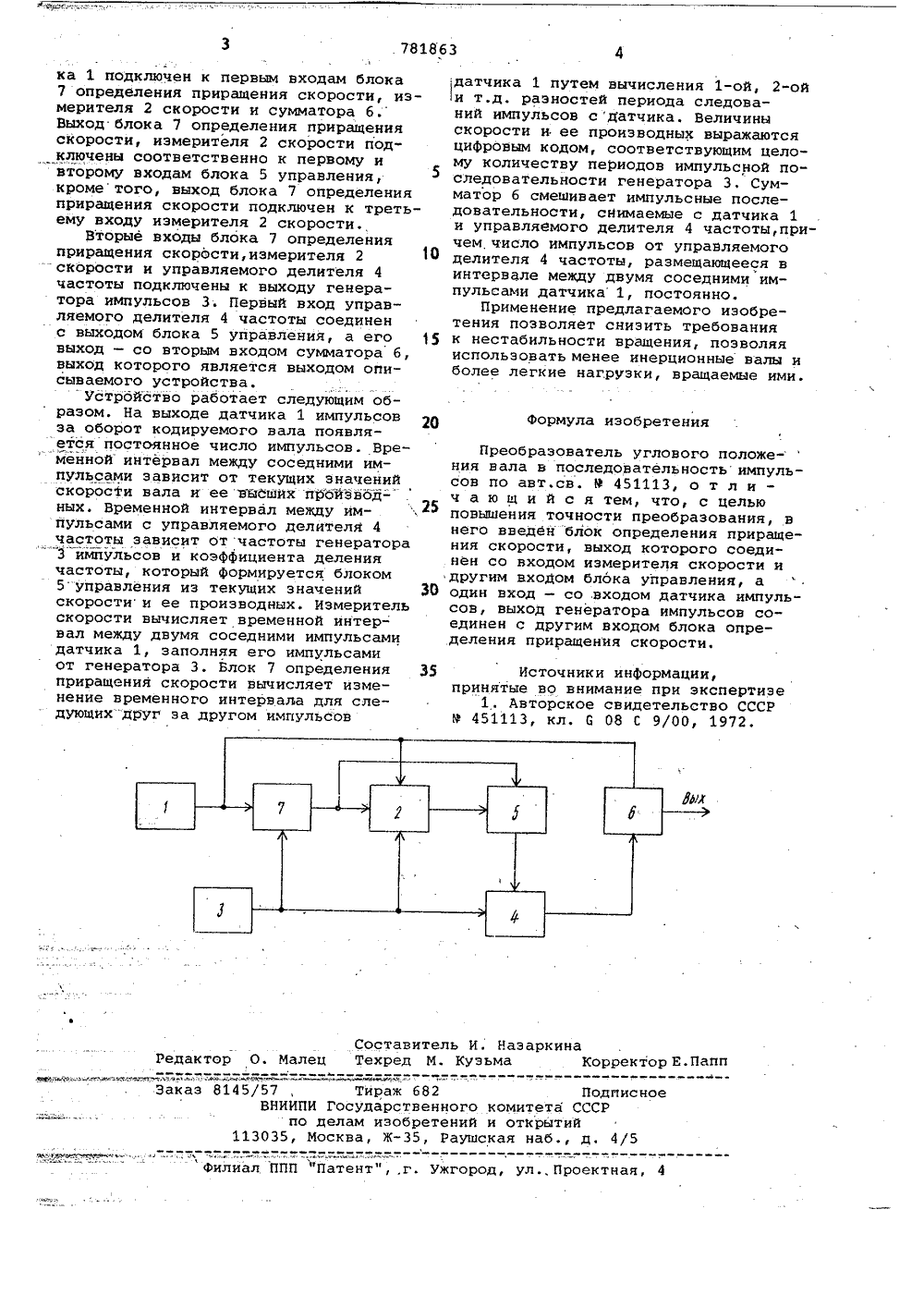
и 1781863 ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советских Социалисткческнх Республик(22) Заявлено 201278 (21) 2700684/18-24с присоединением заявки Йф(53)М. Кл,з С 08 С 9/00 Государствеииый комитет СССР ио делам изобретений и открытий(54) ПРЕОБРАЗОВАТЕЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА В ПОСЛЕДОВАТЕЛЬНОСТЬ ИМПУЛЬСОВ Изобретение относится к автоматике и измерительной технике и может быть использовано, например в радио- локации и радионавигации, в частности в устройствах автоматического съема 5 цифровой информации об угле поворота антенны обзорных РЛС и радиопеленгаторов и является усовершенствованием известного устройства./ 0По основному авт. св. М 451113 известен преобразователь углового положения вала в последовательность импульсов, содержащий датчик импульсов,выход которого соединен со входом 15 измерителя скорости, к другому входу которого подключен выход генератора импульсов. Выход генератора импульсов соединен также со входом управляемого делителя частоты, другой вход которо го через блок управления соединен с выходом измерителя скорости, а выход - со входом сумматора, к другому входу которого подключен выход датчика импульсов Г, 25 Недостаток этого преобразователя - возникновение ошибок отслеживания угла при движении кодируемого вала с ускорением или замедлением. 30 Целью изобретения является повышение точности отслеживания углаповорота вала.Поставленная цель достигается введением блока определения приращенияскорости, выход которого соединен совходом измерителя скорости и другимвходом блока управления, а один вход -со входом датчика импульсов, выходгенератора импульсов соединен с другим входом блока определения приращения скорости.Блок определения приращения скорости позволяет скорректировать числоимпульсов, вырабатываемых управляемымделителем частоты, в условиях уско"ренного (замедленного) вращения валаи таким образом повысить точностьотслеживания.На чертеже изображена структурнаясхема устройства,Преобразователь содержит датчик 1импульсов, измеритель 2 скорости, генератор 3 импульсов,управляемый делитель 4 частоты, блок 5 управления,сумматор 6, блок 7 определения приращения скорости.Предлагаемое устройство .состоитиз датчика 1 импульсов, жестко связанного с кодируемым.валом. Выход датчи781863 Формула изобретения ь И. НазаркинаКузьма Корре ставихред а едакто алец Заказ 81 Фн 4 МАЭраж 682арственного комитетаизобретений и открытиЖ, Раушская наб./57 ВНИИ п 3035, ПодписноеСССРЙд, 4/5 Госуделамоскв 1 Патент"г. Ужгоро филиал ПП УлПроектная, 4 ка 1 подключен к первым входам блока 7 определения приращения скорости, измерителя 2 скорости и сумматора б. Выход блока 7 определения приращения скорости, измерителя 2 скорости подключены соответственно к первому и второму входам блока 5 управления, кроме того, выход блока 7 определения приращения скорости подключен к третьему входу измерителя 2 скорости.,Вторые входы блока 7 определения приращения скорости, измерителя 2 О скорости и управляемого делителя 4 частоты подключены к выходу генератора импульсов 3. Первый вход управляемого делителя 4 частоты соединен с выходом блока 5 управления, а его 15 выход - со вторым входом сумматора б, выход которого является выходом описываемого устройства.Устройство работает следующим образом, На выходе датчика 1 импульсов що за оборот кодируемого вала появляется постоянное число импульсов. Временной интервал между соседними импульсами зависит от текущих значений скорости вала к ее юйсшйх пройэводных. Временной интервал между импульсами с управляемого делителя 4 частоты зависит от частоты генератора 3 ймпулщсов и коэффициента деления частоты, который формируется блоком 5 управления из текущих значений 30 скорости и ее производных. Измеритель скорости вычисляет временной интервал между двумя соседними импульсами датчика 1, заполняя его импульсами от генератора 3. Блок 7 определения 35 приращения скорости вычисляет изменение временного интервала для следующих-друг за другом импульсов датчика 1 путем вычисления 1-ой, 2-ойи т.д. разностей периода следований импульсов сдатчика. Величины скорости и ее производных выражаются цифровым кодом, соответствующим целому количеству периодов импульсной последовательности генератора 3, Сумматор б смешивает импульсные последовательности, снимаемые с датчика 1 и управляемого делителя 4 частоты,причем число импульсов от управляемого делителя 4 частоты, размещающееся в интервале между двумя соседними импульсами датчика 1, постоянно.Применение предлагаемого изобретения позволяет снизить требования к нестабильности вращения, позволяя испольэовать менее инерционные валы и более легкие нагрузки, вращаемые ими. Преобразователь углового положения вала в последовательностьимпульсов по авт.св. Р 451113, о т л и - ч а ю ц и й с я тем, что, с целью повышения точности преобразования, в него введЕн блок определения приращения скорости, выход которого соединен со входом измерителя скорости и другим входом блока управления, а один вход - со .входом датчика импульсов, выход генератора импульсов соединен с другим входом блока определения приращения скорости,Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР 9 451113, кл. С 08 С 9/00, 1972.
СмотретьЗаявка
2700684, 20.12.1978
ПРЕДПРИЯТИЕ ПЯ Г-4421
ЛЕКОХМАХЕР ВЯЧЕСЛАВ СЕМЕНОВИЧ, ГОРБУНОВ ЮРИЙ НИКОЛАЕВИЧ, ГОЖИЙ ЛЮДМИЛА НИКОЛАЕВНА
МПК / Метки
МПК: G08C 9/00
Метки: вала, импульсов, положения, последовательность, углового
Опубликовано: 23.11.1980
Код ссылки
<a href="https://patents.su/2-781863-preobrazovatel-uglovogo-polozheniya-vala-v-posledovatelnost-impulsov.html" target="_blank" rel="follow" title="База патентов СССР">Преобразователь углового положения вала в последовательность импульсов</a>
Датчик измерителя скорости транспортного средства и автодинный преобразователь

Номер патента: 1829105
Опубликовано: 23.07.1993
Авторы: Енютин, Коновалов, Маслов, Якухин
МПК: G01S 13/60, H03B 7/14, H03B 9/12
Метки: автодинный, датчик, измерителя, скорости, средства, транспортного
...а такжето обстоятельство, что рупор и линза не "0представляют иэ себя замкнутый объем, аразнесены. в пространстве, снижает возможность возникновения на токонесущейповерхности рупора-излучателя и радио проэрачной поверхности рупора-излучателяи радиопрозрачной поверхности линзыводяного конденсата, который может увеличить потери энергии и вызвать возникновение паразитного отраженного сигнала, Этотакже обеспечивает увеличение точности 20измерения скорости и повышение надежности работы датчика,На корпусе (1) жестко установлен кронштейн(7), охватывающий эонуизлучения рупора, на кронштейне крепятся электронные 25платы (8),Иа фиг.2 представлена. конструкция автодинного преобразователя., где принятыследующие обозначения; 9- отрезок...
Генератор импульсов с линейно изменяющейся частотой

Номер патента: 1256158
Опубликовано: 07.09.1986
МПК: H03K 3/72
Метки: генератор, изменяющейся, импульсов, линейно, частотой
...блока 10 соединен с входомсчетчика 11, выход которого подключен к входу блока 12, а третий выходпоследнего подключен к входам реверса счетчиков 4 и 9.На Фиг, 2 приведены следующиеобозначения: Р ы - выходной частотный сигнал, Р, - начальный частотный сигнал; Т , Т - периоды экстремумов графика,Генератор работает следующим образом.При поступлении короткого импульса по шине 15 "Пуск" ключ 13 открывается и устанавливается в нольсчетчик 11, записывается код И наточального значения периода в счетчик9 и единица в счетчик 4 и регистр 5хранения, С этого момента с шины 17делителя 8 поступает частота Ртак как на вход делителя 8 поступаетчастота с выхода генератора 1 а науправляющих входах устанавливаетсякод И с выходов счетчика 9. Частотас выхода...
Следящий фильтр-демодулятор для изме рения частоты сигналов допплеровских измерителей скорости

Номер патента: 570183
Опубликовано: 25.08.1977
МПК: H03D 13/00
Метки: допплеровских, изме, измерителей, рения, сигналов, скорости, следящий, фильтр-демодулятор, частоты
...скорости содержит квадратурные смесители 1,2, первые входы которых объедииены и являются входом устройства, последовательно соединенные формирователь чаототной ошибки 3, интегратор 4 и управляемый генератор квадратурных сигналов 5, выходы которого соединены со вторыми входами квадратурных смесителей 1, 2 а также блок формирования квадрата модулейсигнала 6, выход которого через триггерШмидта 7 соединен с входом управленияключа 8. Кроме того, в него введены управ 40ляемые фильтры 9, 1 О, включенные междувыходами квадратурных смесителей 1, 2 ивходами формирователя частотной ошибки3 и блока формирования квадрата модулясигнала 6, частотный детектор ошибки 11, 35детектор частоты управляемого генератора 12, сумматор 13 с запоминающей емкостью...
Датчик частоты вращения для электро-привода c частотно фазовым регули-рованием

Номер патента: 842582
Опубликовано: 30.06.1981
Авторы: Агеев, Булин-Соколов, Казанцев, Карагашин
МПК: G01P 3/46
Метки: вращения, датчик, регули-рованием, фазовым, частотно, частоты, электро-привода
...следующие цифровые обозначения: на выходе генератора 1 несущей частоты - 21, на выходах элементов 14 и 17 - 22 и 23, на выходах согласующих трансформато ров 9 и 10 - 24 и 25, на выходах триггера 9 - 26 и 27, на выходе элемента 15 дифференцирования - 28, на выходах триггера 10 - 29 и 30, на выходе элемента 16 дифференцирования - 31, на выходах элементов ИЛИ 18 и 19- 32 и 33, на выходах триггера 20-34 и 35, на выходе элемента И-НЕ 11-36 и 37.Датчик частоты вращения работает следующим образом. 60Ротор 3 датчика 2 приводится во вращение от электродвигателя. При вращении ротора 3 его магниты производят попеременное насыщение дросселей 4. Напряжение на выходе дросселей 4, которое снимается с резисторов 5 и б с помощью трансформаторов 7и 8...
Следящий аналого-дискретный преобразователь для измерения частоты сигналов допплеровских измерителей скорости

Номер патента: 1018192
Опубликовано: 15.05.1983
Авторы: Бушуев, Костин, Чуркин
МПК: H03D 13/00
Метки: аналого-дискретный, допплеровских, измерителей, сигналов, скорости, следящий, частоты
...Р -триггера 8. Выходы первого и второго импульсных формирователей 10 и 14 объединены и общей точкой соеди иены с входом инвертора 23 и Э-входом ЭК-триггера 22, а выход третье- . го импульсного Формирователя 18 соединен с К-входом ЭК-триггера 22. Инвертор 23 и элемент И-НЕ 24 соеди нены последовательно, причем к второму входу элемента И-НЕ 24 подключен выход ЭК-триггера 22. Выход элемента И-НЕ 24 является выходом блока 7 сложения и вычитания частот.Э -входы Р -триггеров 8 и 9 являют ся командными входами блока 7 слокения и вычитания частот, С-входы Р-триггеров 8 и 9 - тактовыми входами, а вход первого импульсного фор мирователя 10 - информационным входом.Аналого-дискретный преобразователь работает следующим образом.С выходов...
Предыдущий патент: Устройство для аварийной сигнализации
Следующий патент: Преобразователь углового положения вала в код
Случайный патент: Автоматические весы