Устройство для управления адаптивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 729547
Авторы: Козякин, Розин, Соколовский, Ульянов

Текст
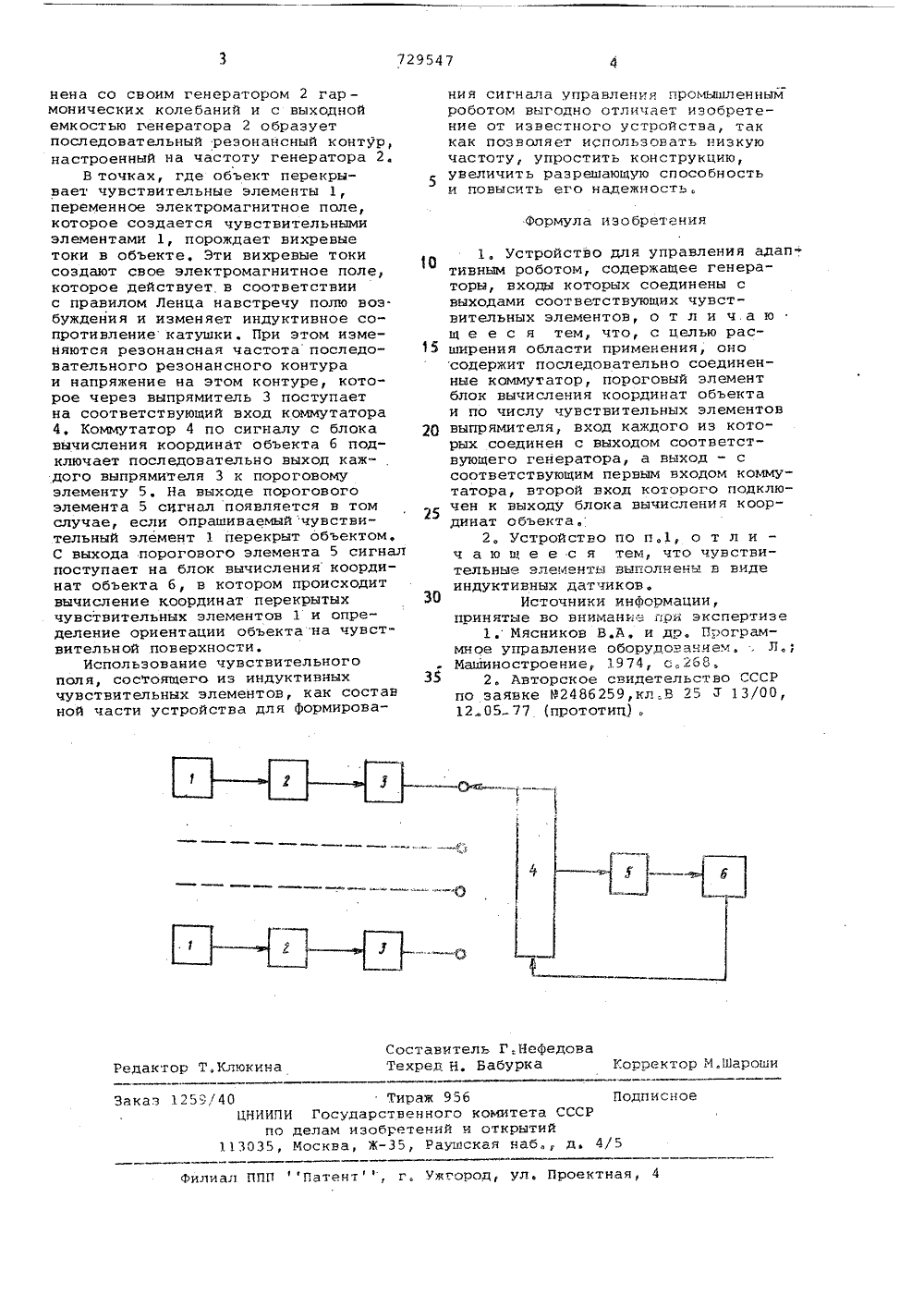
Ф З.т("ь, л;, И НИ ОП (:А Е ИЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(22) Заявлено 050978 (21) 2661124/18-24с присоединением заявки Мо(23) ПриоритетОпубликовано 2504.80. Бюллетень И 9 15 51)М. Кл. 6 05 В 11/00 В 2 У 13/00 Государственный комитет СССР по делам изобретений и открытий(088,8) Дата опубликования описания 250480(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ1 О 2 О Изобретение относится к автоматике и вычислительной технике иможет быть использовано при созданиисистемы управления очувствленнымпромышленным роботом.Известно устройство для управления адаптивным роботом, содержащееконтактные чувствительные элементы, блок управления и вычислительный блок 1 .Однако оно имеет узкую область применения.Наиболее близким техническимрешением к изобретению является устройство, содержащее генераторы, 15 входы которых соединены с выходами соответствующих чувствительныхэлементов 2.Недостатками данного устройстваявляются загрязнение поверхности матрицы, которое ведет к изменению емкости между пластинами и объектом,т.е. снижению точности измерения; необходимость работы на высокой частоте, что приводит к усложнению 25 конструкции электронной части устройстват низкая разрешающая способностьЦель изобретения - расширение области применения устройства. ЗО Для этого в устройство введеныпоследовательно соединенные коммутатор, пороговый элемент, блоквычисления координат объекта и почислу чувствительных элементов вы-.прямителя, вход каждого из которыхсоединен с выходом соответствующегогенератора, а выход - с соответствующим первым входом коммутатора,другой вход которого подключенк выходу блока вычисления координатобъекта,Кроме того, чувствительные элементы. выполнены в виде индуктивныхдатчиков.На чертеже представлена функциональная схема устройства.. Оно имеет чувствительные элементы 1, генераторы 2, выпрямители 3,коммутатор 4, пороговый элемент 5,блок вычисления координат объекта б.Устройство работает следующимобразом.Металлический объект манипулирования, установленный на чувствительную поверхность, перекрываетнекоторое количество чувствительных элементов 1, состоящих из катушек, намотанных на ферритовыесердечники, Каждая катушка соеди729547 Формула изобретения Составитель Г,.НеФедоваТехред Н. Бабурка Корректор М,Шароши Редактор Т,Клюкина Заказ 1259/40 Тираж 956 ЦНЙИЛИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4/5Подписное Филиал ППП Патент , г, Ужгород, ул. Проектная, 4 нена со своим генератором 2 гар -монических колебаний и с выходнойемкостью генератора 2 образуетпоследовательный резонансный контур,настроенный на частоту генератора 2,В точках, где объект перекрывает чувствительные элементы 1,переменное электромагнитное поле,которое создается чувствительнымиэлементами 1, порождает вихревыетоки в объекте, Эти вихревые токисоздают свое электромагнитное поле,которое действует в соответствиис правилом Ленца навстречу полю воз.буждения и изменяет индуктивное сопротивление катушки . При этом изменяются резонансная частота последовательного резонансного контураи напряжение на этом контуре, которое через выпрямитель 3 поступаетна соответствующий вход коммутатора4, Коммутатор 4 по сигналу с блока 2 Овычисления координат объекта б подключает последовательно выход каждого выпрямителя 3 к пороговомуэлементу 5, На выходе пороговогоэлемента 5 сигнал появляется в томслучае, если опрашиваемыйчувствительный элемент 1 перекрыт объектом.С выхода порогового элемента 5 сигналпоступает на блок вычисления координат объекта б, в котором происходитвычисление координат перекрытых ЭОчувствительных элементов 1 и определение ориентации объекта на чувствительной поверхности.Использование чувствительногополя, состоящего из индуктивных 35чувствительных элементов, как составной части устройства для формирования сигнала управления промышленнымроботом выгодно отличает изобретение от известного устройства, таккак позволяет использовать низкуючастоту, упростить конструкцию,увеличить разрешающую способностьи повысить его надежность. 1, Устройство для управления адаптивным роботом, содержащее генераторы, входы которых соединены свыходами соответствующих чувствительных элементов, о т л и ч.а ющ е е с я тем, что, с целью расширения области применения, оносодержит последовательно соединенные коммутатор, пороговый элементблок вычисления координат объектаи по числу чувствительных элементоввыпрямителя, вход каждого из которых соединен с выходом соответствующего генератора, а выход - ссоответствующим первым входом коммутатора, второй вход которого подключен к выходу блока вычисления координат объекта,2, Устройство по п,1, о т л ич а ю щ е е с я тем, что чувствительные элементы выполнены в видеиндуктивных датиков,Источники инФормации,принятые во внимани: при экспертизе1. Мясников В.А, и др, Программное управление оборудованием, , Л;Машиностроение, 1974, с,288,2, Авторское свидетельство СССРпо заявке 9248 б 259,кл,Б 25 Т 13/00,12 05 77 (прототип .
СмотретьЗаявка
2661124, 05.09.1978
ПРЕДПРИЯТИЕ ПЯ М-5671
КОЗЯКИН АНАТОЛИЙ АНДРЕЕВИЧ, РОЗИН БОРИС ШАЕВИЧ, СОКОЛОВСКИЙ ФЕЛИКС ПАВЛОВИЧ, УЛЬЯНОВ СЕРГЕЙ СЕРГЕЕВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: адаптивным, роботом
Опубликовано: 25.04.1980
Код ссылки
<a href="https://patents.su/2-729547-ustrojjstvo-dlya-upravleniya-adaptivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивным роботом</a>
Устройство для преобразования координат объекта

Номер патента: 951317
Опубликовано: 15.08.1982
Авторы: Ахметов, Гусев, Прокопенко
МПК: G06F 7/548
Метки: координат, объекта, преобразования
...в которые в начальный момент времени заносятся коды от 1 до(и)-го разряда углов соответственно сд и с( В, при этом выходы .35 и 36запрета с (п+1,)-ых разрядов схем 3 н 44 сравнения, где п - число разрядов,равное 90 , углов ссА, с(д и Фо. Черезпромежуток времени ТЫА: 4 д. (Фиг. 70),что соответствует моменту перехода(и+1)-го разряда схемы 3 сравнения 45с нуля в единицу, блок 2 умножениязапрещает прохождению число-импульсного кода Чй ь 1 и с(Т , В результатеполученный число-импульсный код Чдз 1 и Ф А (кривая ОА, фиг.7,ц) с выхода 27 блока 2 умножения поступаетчерез блок 6 управления, выполненныйна элементах 2 И-ИЛИ 26 (фиг.3), насуммирующий или вычитающий входы сумматора 8 в зависимости от значения(и)-го разряда угла сд, а такжеот...
Телевизионная система для измерения координат объектов

Номер патента: 1107341
Опубликовано: 07.08.1984
МПК: H04N 7/18
Метки: координат, объектов, телевизионная
...которого1107341 30 35 40 45 подключен к управляющему входу коммутатора и к управляющему входу запоминающего устройства, информационныйвход которого соединен с вторым выходом коммутатора, а выход - с вторым входом вычитателя, причем входомблока выделения сигналов точечиогообъекта является вход аналого-цифрового преобразователя, первым выходомвыход генератора импульсов, а вторымвыходом - выход порогового элемента.На фиг. 1 представлена структурная электрическая схема телевизионной системы для измерения координатобъектов; на Фиг. 2 - то же, блокауправления 1 на Фиг. 3 - то же, блока 15выделения сигнала точечного объекта,Телевизионная система для определения координат объектов фиг. 1) содержит последовательно включенныетелевизионную...
Устройство для определения координат объекта

Номер патента: 1753273
Опубликовано: 07.08.1992
Автор: Пермяков
МПК: G01C 1/00
...Четвертый его вход подключен к выходу регистра 27, входом соединенного с фотоприемником 18 регистрации направления визирной оси на активную марку, представляющую модулированный источник 17 излучения, смонтированный на штанге. В непосредственной близости с источником 17 смонтирован уголковый отражатель 26. Перед фотоприемниками 18 установлены объектив 20 и полевая диафрагма 21. Излучение от источника 17 попадает на фотоприемник .18 при выполнении условияр =20+-у , (1) где р - угол превышения измеряемой точки;0 - угол наклона зеркала 4.Перед тем как приступить к измерениям на местности, необходимо скорректировать. угловую ошибку установки светодальномера путем измерения "0" отсчета, Для этого угломерная колонка и светодальномер...
Устройство для измерения координат объекта

Номер патента: 603151
Опубликовано: 15.04.1978
Автор: Алиев
МПК: H04N 7/18
...также отличны отимпульсов, соответствующих координате Х, формирующих вертикальные линии правой измерительной плоскости пространственной решетки. Импульсы, формирую,цие остальные ребра пространственной решетки (как горизонтальныЕ, так и вертикальные) в процессе измерения не используются,Г 1 ространственная решетка при измерении необходима для визуальной ориентации в стереоскопическом изображении,Процесс измерения начинается с выбора опе ратором объектов измерения. Например, требуется измеритель координаты объекта А относительно объекта В произвольно выбранных в пространстве по их стереизображению.Выходы датчика 4 импульсов подключают кстереоскопическому видеоконтрольному блоку 3и накладывают на стереотелевизионное изображение...
Устройство для измерения координат объекта

Номер патента: 595878
Опубликовано: 28.02.1978
МПК: H04N 7/18
...через точки 1, 2, 3 и и весь процесс сканирования растра, описанный выше, повторяется.Сканирование телевизионного растра позволяет увсличцп, количество отсчстов по осям Х и У при сохранении неизменной полосы пропускания устройства ц тем самым повысить точность измерения, сохранив ее чувствительность. При этом ошибка измерения будет определяться величиной т; а точность измерения повышается ца величины Х и У. (1 а фиг. 2 Х, У координаты объекта, измеренные без применения сканирования телевизионного растра, а Х, У коорлпнаты объекта, измеренные при сканировании телевизионного растра.Задающий генератор 9 вырабатывает импульсы с периодом слсловация, равцым тр (фиг. З,а). Эти импульсы подаются ца вход блока 2 залсржки с и выхолами. Общее...
Предыдущий патент: Устройство для управления приводом промышленного робота
Следующий патент: Устройство для управления очувствленным манипулятором
Случайный патент: Ротационный испаритель