Система управления копирующим манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
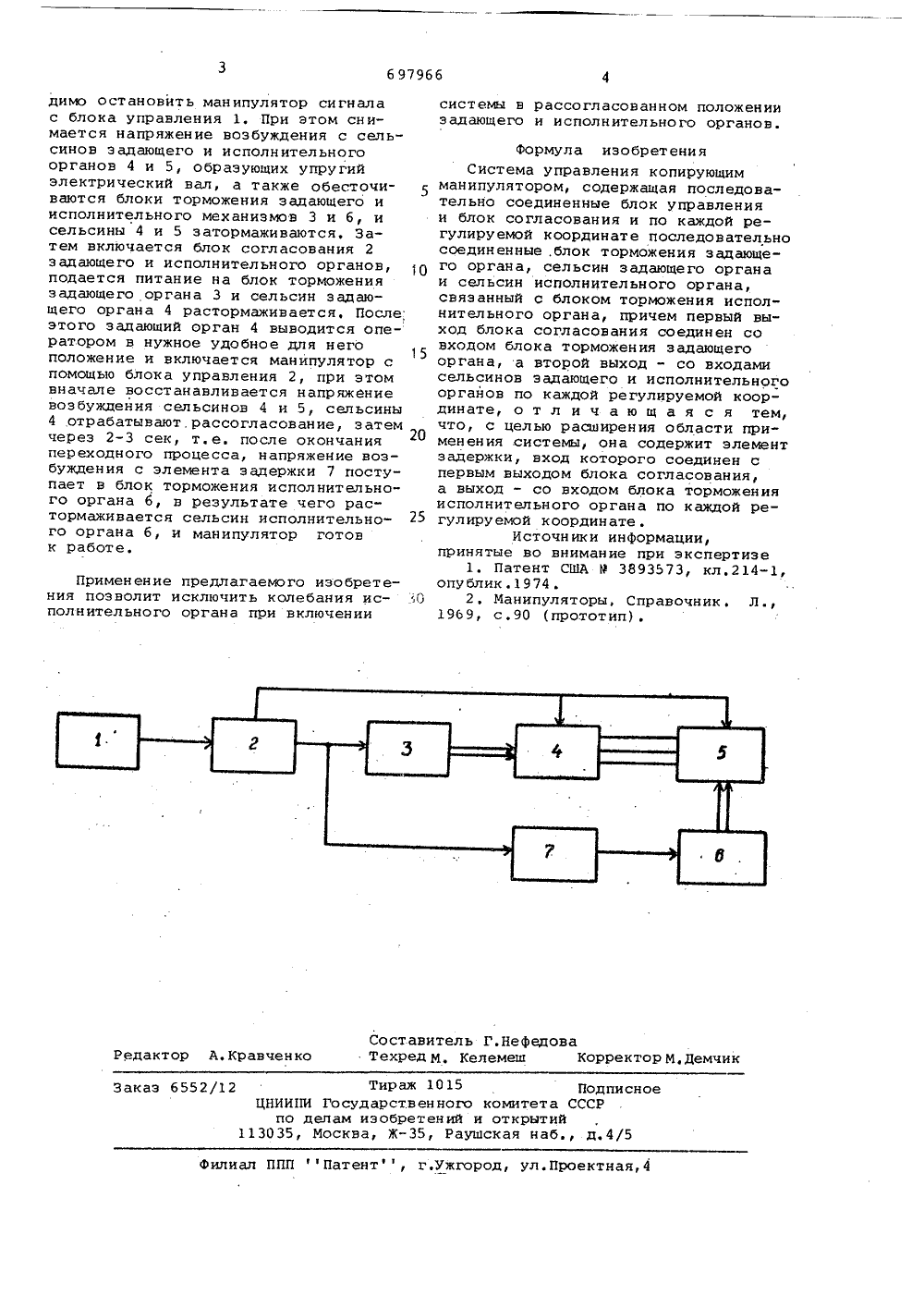
=,МБ Союз Советских Сбциэпистических Республик697966 61) Дополнительное к авт. свид-ву -Заявлено 160 3 7 8 (21) 2 5 91876/18-2 5 В 11/01 5 У 13/00 единением заявки Мо с твенный комите СССРам изобретеннй открытий судпубликовано 9, Бюллетень Ю 4 та опубликования описания 15,11,79 2) Авторы изобрете Л, Калин ов и А. С Милич(54) СИСТЕМА УПРАВЛЕНИЯ КОПИРУЮЩИ 1"1 АНИ ПУЛ ЯТ ОРОМ Изобретениеке и может бытсоздании систещим манипуляторедачей угла.Известна сипирующим гланизадающий и испс установленныи устройство,ное соотнощениполнит ельного я кожащаянын амиазличи исстема управленг пулятором, содер олнитсльный орга ми на них сельси обеспечивающее р е длин задающегоорганон (1) . м 25 ания осей задаю механизма необх ассогла ительно относится к автоматиь использовано при м управления копируюром с сельсинной пеОднако известная система не допус-, кает углового рассогласования зада ющего и исполнит ельного ор ганов.Наиболее близка предлагаемой по т ехнической сущност и сист ема, содержащая последовательно соединенные блок управления и блок согласования 20 и по каждой регулируемой координате посл едо в ател ьно соедин ен ные бло к торможения задающего органа, сельсин задающего органа, сельсин исполнительного органа, связанный с блоко торгложения исполнительного органа, причем первый выход блока согласования соединен со входам каждого блока торможения задающего органа, а второй выход - со входами сельсинов за дающего и исполнительного органов покаждой регулируемой координате (23 .Недостатком этой систелы являетсяналичие колебаний задающего и исполнительного механизмов (исполнительногов большей степени), вызываемые синхронизацией сельсинов при включении рассогласованных задающего и исполнительного механизмов.Цель изобретения - раааирение области применения систелы.Указанная цель достигается тем,что система содержит элемент задержки,вход которого соединен с первым выходом блока согласования, а выходсо входом блока торможения исполнительного органа по каждой регулируемой координате,На чертеже изображена функциональная схема предлагаемой системы.Система содержит блок управления 1,блок согласования 2, блок торможенияз адающего органа 3, сельсин з адающего органа 4, сельсин исполнительногооргана 5, блок торможения исполнительного органа 6, элемент задержки 7.Система работает следующим образом,Для р сов щегои исполн го об 97966 Составитель Г Техред М. Келе Редактор А, Кравчен ко Тираж 1015 дарств ен ного обретен ий Ж, Раушсно Подомитета СССРоткрытийкая наб., д,аказ 6552/12 ЦНИИПИ по 3035, елам из осква,иал ППП Патентф, г,ужгород, ул.Проектная димо остановить манипулятор сигнала с блока управления 1. При этом снимается напряжение возбуждения с сель- синов задающего и исполнительного органов 4 и 5, образующих упрУгий электрический вал, а также обесточи ваются блоки торможения задающего и исполнительного механизмов 3 и б, и сельсины 4 и 5 затормаживаются, Затем включается блок согласования 2 задающего и исполнительного органов, подается питание на блок торможения задающего органа 3 и сельсин задающего органа 4 растормаживается. После; этого задающий орган 4 выводится оператором в нужное удобное для него15 положение и включается манипулятор с помощью блока управления 2, при этом вначале восстанавливается напряжение возбуждения сельсинов 4 и 5, сельсины 4 отрабатывают. рассогласование, з атем через 2-3 сек, т. е. после окончания переходного процесса, напряжение возбуждения с элемента задержки 7 поступает в блок торможения исполнительного органа б, в результате чего рас" тормаживается сельсин исполнительного органа б, и манипулятор готов к работе. Применение предлагаемого изобретения позволит исключить колебания ис полнительного органа при включении системы в рассогласованном положении задающего и исполнительного органов. Формула изобретенияСистема управления копирующимманипулятором, содержащая последовательно соединенные блок управленияи блок согласования и по каждой регулируемой координате последовательносоединенные, блок торможения задающего органа, сельсин задающего органаи сельсин исполнительного органа,связанный с блоком торможения испол"нительного органа, причем первый выход блока согласования соединен совходом блока торможения задающегооргана, а второй выход - со входамисельсинов задающего и исполнительногоорганов по каждой регулируемой координате, о т л и ч а ю щ а я с я тем,что, с целью расширения области применения системы, она содержит элементзадержки, вход которого соединен спервым выходом блока согласования,а выход - со входом блока торможенияисполнительного органа по каждой регулируемой координате .Источники информации,принятые во внимание при экспертизе1. Патент США Р 3893573, кл,214-1,опублик.1974.2. Манипуляторы, Справочник. Л.,1969, с.90 (прототип). ефедова Корректор М,Демчик
СмотретьЗаявка
2591876, 16.03.1978
ПРЕДПРИЯТИЕ ПЯ В-8721
КАЛИНОВ ГЕННАДИЙ ЛЕОНИДОВИЧ, ФИЛИЧЕВ АЛЕКСАНДР СЕРГЕЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: копирующим, манипулятором
Опубликовано: 15.11.1979
Код ссылки
<a href="https://patents.su/2-697966-sistema-upravleniya-kopiruyushhim-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления копирующим манипулятором</a>
Способ определения перемещения рабочего органа исполнительного механизма гидропривода

Номер патента: 1377497
Опубликовано: 28.02.1988
МПК: F15B 19/00
Метки: гидропривода, исполнительного, механизма, органа, перемещения, рабочего
...Москва, Ж, Раушская наб д,4/5ф.Производственно-полиграфическое предприятие, г,ужгород, ул,Проектная,4 Изобретение относится к машино-,.строению и может быть использовано всистемах автоматического управлениягидроприводами. Цель изобретения - повышение надежности при эксплуатации в условиях с повышенной вибрацией, влажностью, температурой. 30 Предлагаемый способ осуществляетсяследующим образом.115 При работе гидропривода измеряют расход, температуру и давление .в гид ролинии питания исполнительного механизма и по предварительно полученной зависимости перемещения рабочего ор гана исполнительного механизма от расхода в гидролинии питания при различных значениях температуры и давления рабочей жидкости определяют величину перемещения рабочего...
Устройство для контурного управления промышленным роботом

Номер патента: 1211691
Опубликовано: 15.02.1986
Авторы: Баранов, Жукова, Литвинцев, Пятницкий
МПК: G05B 19/00
Метки: контурного, промышленным, роботом
...номером замкнутой кнопки из набора клавиши переключателя 36,.Появление сигнала "0" на второмвходе элемента 29 устанавливает наее выходе сигнал "1", и сигналы отэлемента 28 не проходят на вход С 1счетчика 30. Счет прекращается исчетчик 30, дешифратор 35 остаютсяв состоянии на момент появления "0",на втором входе элемента 29. Такимобразом, замыкание клавишного переключателя 36 обеспечивает остановку счета после прохождения -го отрезка траектории, соответственнофиксируется состояние коммутаторов22 и 24 блока 1 (фиг. 2), и на выход Хкэтого блока поступает ко -ордината Х; конца 1"го отрезка.Аналогично на выходы У. и 2 .1 поступают координаты У, и Е,Появление сигнала "0" на второмвходе элемента 37 вызывает появлениесигнала "1" на его...
Частотно-регулируемый электропривод с блоком торможения

Номер патента: 1056411
Опубликовано: 23.11.1983
Авторы: Андерс, Андреев, Богатин, Брискман, Гусевский, Колобов, Лопатин, Степанов
МПК: H02P 3/22
Метки: блоком, торможения, частотно-регулируемый, электропривод
...групп, подключенные к одной фазе асинхронной машины4,образуют попарно плечи мостового выпрямителя,При этом основной и дополнительные резисторы включены между разноименными полюсами мостового выпрямителя и источника постоянного на пряжения. В электроприноде при выполнении иннертора н виде инвертора тока (фиг, 2 ), на входе которого включен дроссель 11, тормозные резисторы включены между одноименными полюсами мостового выпрямителя и источника постоянного напряжения. Блок-схема электропривода для регулирования тормозного режима (фиг. 3) приведена н качестве иллюстраций для привода с инвертором напряжения и для случая использования только одного дополнительного тормозного резистора 7 и соответствующей группы 9 управляемых...
Частотно-регулируемый электропривод с блоком торможения

Номер патента: 1229937
Опубликовано: 07.05.1986
Авторы: Андерс, Богатин, Колобов, Петров, Степанов
МПК: H02P 3/22
Метки: блоком, торможения, частотно-регулируемый, электропривод
...12 тормозного режима, а выход через формирователь 13 - к управляющим электродам тиристоров группы 5. Дополнительный выход задатчика 5 тормозного режима через формирователь 14 подключен к управляющим электродам тиристоров группы 6.Частотно-регулируемый электропривод (фиг. 1) работает следующим образом.Регулирование величины эквивалентного сопротивления тормозного резистора осуществляется за счет изменения длительности проводимости управ3, 229937 4ляемых вентилей, управление которыми жение, соответствующее току 1, проосуществляется по алгоритму управле- текающему по группам тормозных рения тиристорами инвертора 2, Энергия зисторов 8 и 7 при заданном макситорможения асинхронной машины черезмальном напряжении на входе инвергруппу...
Гидравлический привод исполнительного органа металлорежущего станка

Номер патента: 1021567
Опубликовано: 07.06.1983
Авторы: Володько, Горский, Дривень, Жилинский, Кузьмич, Тилигузов
МПК: B23Q 15/00
Метки: гидравлический, исполнительного, металлорежущего, органа, привод, станка
...блок 14, выполненный с возможностью настройки его параметров. Один вход суммирующего усилителя 13 соединен с задатчиком давления 2, другой через корректирующий блок 14 - с датчиком давления 11, а выход - с электромеханическим3преобразователем 10 гидравлического усилителя 9. Корректирующий блок 14 связан с датчиком скорости 15 исполнительного органа 2 через систему регулирования, которая включает в себя задатчик 16, блок сравнения 17 сигналов датчика 15 и задатчика 6 и механизм настройки 18 корректирующего блока 14. Один вход блока сравнения 1 соединен с датчиком 15, другой - с задатчиком 16, а выход - механизмом настройки 10 корректирующего блока 14.Гидравлический привод исполнительного органа металлорежущего станка работает...
Предыдущий патент: Следящий привод
Следующий патент: Устройство для импульсного регулирования
Случайный патент: Устройство для измерения размеров