Способ компенсации ошибки следящей системы с двумя преобразователями в прямой цепи
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 257576
Автор: Зайцев

Текст
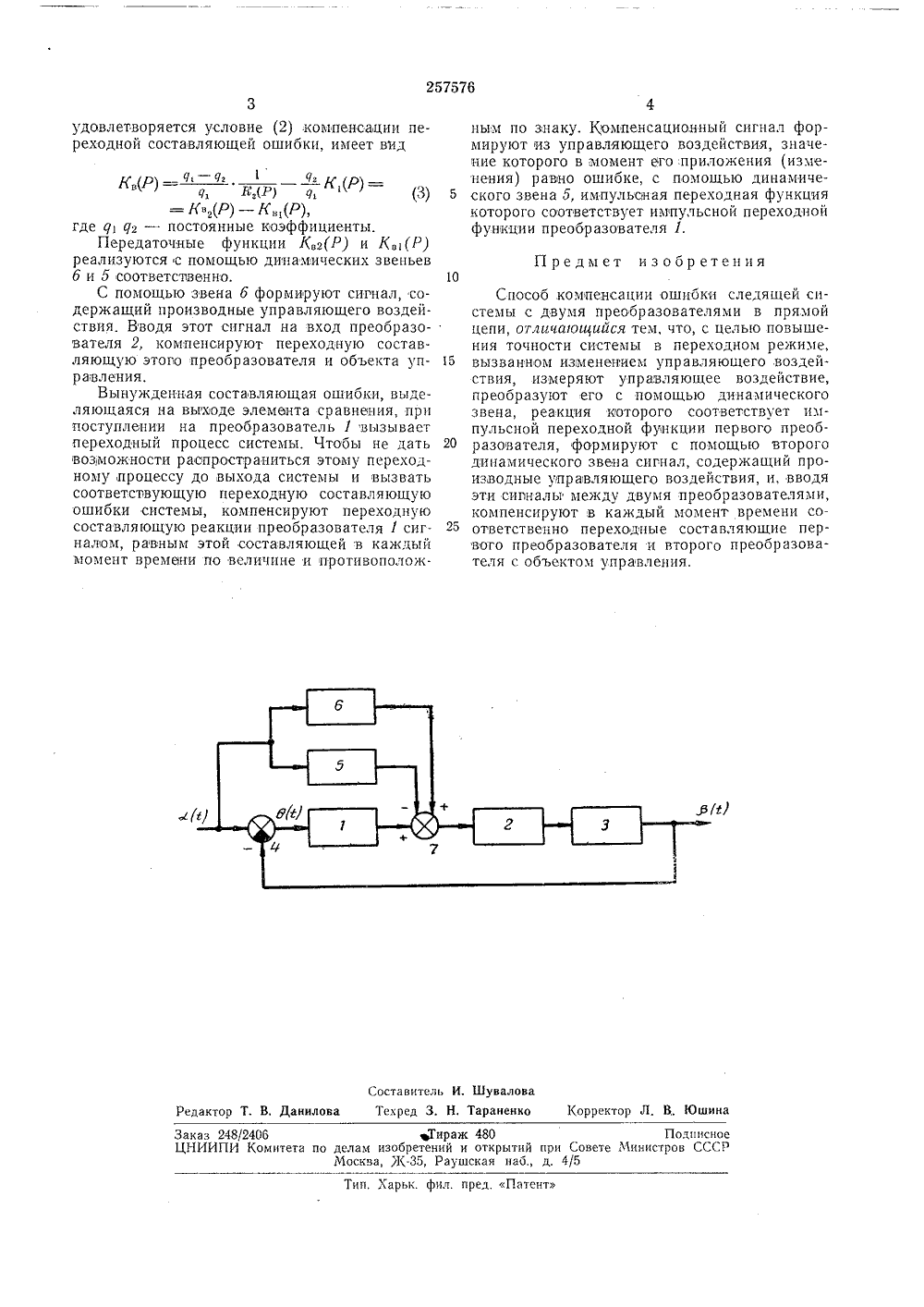
Союз Советских Социалистических РеспубликИЗОБРЕТЕН ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ тельства-Зависимое от авт. сви,Ч 1,1967 ( 1170126/18 Заявл л, 21 с, 46 с присоединением заявки-Комитет по делам изобретений и открытий при Совете Министров СССР. Ф. 3 аявитель ПОСОБ КОМПЕНСАЦИ С ДВУМЯ ПРЕОБРАЯЩЕЙ СИСТ РЯМОЙ ЦЕП ОШИБКИ СЛВАТЕЛЯМИ 20 воляет повысить ом режиме, выз щего воздействия системь На чертеже пр ющая описываемь Она содержит ект 3 управления мическое звено функция которогоиведена блок-схей способ.преобразователиэлемент 4 Оравн5, импульснаясовпадает с имп а, поясня 1, г, объения, дина- переходная льсной пеДанное изобретение относится к области систем автоматического управления.Известные способы компенсации ошибки следящих систем с двумя преобразователями в прямой цепи не позволяют коппенсировать переходные режимы систем, вызываемые изменением управляющего воздействия.Предложенный способ отличается тем, что измеряют управляющее воздействие, преобразуют его с помощью динамического звена, реакция которого соответствует импульсной переходной функции первого преобразователя, формируют с помощью второго динамического звена сигнал, содержащий производные управляющего воздействия, и, вводя эти сигналы между двумя преобразорвателями, компенсируют в каждый момент времени соответственно переходные составляющие перьвого и второго преобразователей с объектом управления.Это поз ТОЧНОСТЬв переходи ванном изменением управляю реходной функцией преобразователя 1, динамическое звено б, сумматор 7, управляющееьоздействие х (1), регулируемую величину(1), ошибки системы 0 (1). Преобразователинаходятся в прямой цепи системы и могут состоять из ряда динамических звеньев.Способ заключается в следующем. Еслипередаточные функции преобразователя 1 ппреобразователя 2 с объектом управления О 0 (Р)ооозначить соответственно через К,(Р) =(Р)Я(Р)н К:(Р) =-передаточную функцию паралглельно соединенных лина мических звеньев 5 15 и б через К,(Р) =то передаточнаябв(Р),(р)функция системы, )связывающая ошибку иуправляющее воздействие, будет иметь видК(р) Г 0,(Р) д.(Р,тКе Р г(Р) г(р)+в ) в(Р г(Р)Из выражения (1) видно, что числитель0(Р) и знаменатель Р, (Р) передаточнойфункции К,(Р) не влияют на устойчивостьзамкнутой части системы, и их можно выбирать в соответствии с условием компенсациипереходной составляющей ошибки системыКв(Р)=Ко (2)где К - постоянный коэффициент.Передаточная функция К, (Р), при которой257576 Предмет изобр етения 10 Составитель И. Шувалова Редактор Т. В. Данилова Текред 3. Н. Тараненко Корректор Л, ВЮшинаЗаказ 248/2406 вТираж 480 ПодписноеЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква, К.З 5, Раушская наб., д. 4/5 Тип, Харьк. фил. пред. Патент удовлетворяется условие (2) компенсации переходной составляющей ошибки, имеет вид( ) ( (3)=к".(;) к,где д 1 дг - постоянные коэффициенты.Передаточные функции Квг(Р) и К,1(Р) реализуются с помощью динамических звеньев б и 5 соответственно.С помощью звена б формируют сигнал, содержащий производные управляющего воздействия, Вводя этот сигнал на вход преобразователя 2, компенсируют переходную составляющую этого преобразователя и объекта управления.Вынужденная составляющая ошибки, выделяющаяся на выходе элемента сравнения, прн поступлении на преобразователь 1 вызывает переходный процесс системы. Чтобы не дать возможности распространиться этому переходному процессу до выхода системы и вызвать соответствующую переходную составляющую ошибки системы, компенсируют переходную составляющую реакции преобразователя 1 сигналом, равным этой составляющей в каждый момент времени по величине и противоположным по знаку. Компенсационный сигнал формируют из управляющего воздействия, значение которого в момент его,приложения (изменения) равно ошибке, с помощью динамиче ского звена 5, импульоная переходная функциякоторого соответствует импульсной переходной функции преобразователя 1. Способ компенсации ошибки следящей системы с двумя преобразователями в прямой цепи, отличаощийся тем, что, с целью повышения точности системы в переходном режиме, 15 вызванном изменением управляющего воздействия, измеряют управляющее воздействие, преобразуют его с помощью динамического звена, реакция которого соответствует импульсной переходной функции первого преоб разователя, формируют с помощью второгодинамического звена сигнал, содержащий произлодные управляющего воздействия, и, вводя эти сигналы между двумя преобразователями, компенсируют в каждый момент времени соответственно переходные составляющие первого преобразователя и второго преобразователя с объектом управления.
СмотретьЗаявка
1170126
Г. Ф. Зайцев
МПК / Метки
МПК: G05B 5/01
Метки: двумя, компенсации, ошибки, преобразователями, прямой, системы, следящей, цепи
Опубликовано: 01.01.1969
Код ссылки
<a href="https://patents.su/2-257576-sposob-kompensacii-oshibki-sledyashhejj-sistemy-s-dvumya-preobrazovatelyami-v-pryamojj-cepi.html" target="_blank" rel="follow" title="База патентов СССР">Способ компенсации ошибки следящей системы с двумя преобразователями в прямой цепи</a>
Способ формирования трехуровневого управляющего сигнала в релейных системах управления динамическим объектом и релейный регулятор для механизации этого способа

Номер патента: 1777119
Опубликовано: 23.11.1992
Автор: Леденев
МПК: G05B 11/14
Метки: динамическим, механизации, объектом, регулятор, релейный, релейных, сигнала, системах, способа, трехуровневого, управляющего, формирования, этого
...и отпускэния 15 пятого релейного элемента 20, Рз = 1(Р= 1,В 5 = 1), Рз - выходной сигнал третьего элемента И 9 удерживает первый триггер 22 в нулевом состоянии, Р 4 = 0 (Р 4 = 1), Р 4 и Р 4 - соответственно прямой и инверсный выхо ды четвертого элемента И 10, Т 2 = 0 (Т 2 = 1),Т 2 и Т 2 - прямой и инверсный выходы второ-.го триггера 13, К 2 = О, К 2 - выходной сигнал второго ключа 19 равен нулю, так как этот ключ закрыт сигналом Т 2 = О. Вб = 1, Вв - 25 выходной сигнал шестого релейного элемента 21, йб = 1, так как К 2-д, - д - уровень срабатывания и отпускания шестого релейного элемента 21, Р 5 = 0 (Р 4 = 1, Во = 1), Р 5 - выходной сигнал пятого элемента 30 И 11, Рб = 0 (Т 1 = 1, Вз = 0), Рб - выходнойсигнал шестого элемента И...
Преобразователь сигнала датчика в управляющий сигнал
Номер патента: 372442
Опубликовано: 01.01.1973
Авторы: Вител, Литвин, Маликов, Самойленко, Смирнов
МПК: G01D 5/12
Метки: датчика, сигнал, сигнала, управляющий
...диод и резистор нагрузки.Предложенное устройство отличается тем, что в нем коллектор транзистора подключен к точке соединения датчика и диода, а к базе и эмиттеру подключен дополнительный источник питания, соединенный параллельно и в противофазе с основным источником питания,Это позволило увеличить крути рзования.На чертеже приведена функциональнама устройства,Оно содержит основной источник питатранзистор 2, дополнительный источитания 3, датчик 4, диод 5 и нагрузочныистор б,При отрицательной полярности дотельного источника питания т, образовнапример, генератором напряжения сдовательно включенным резистором,эмиттерный переход транзистора 2 зап ральныи Ордена Трудовогоельский институт комплекснойации Ток положительной полярности...
Устройство для формирования управляющего сигнала системы позиционирования

Номер патента: 1262568
Опубликовано: 07.10.1986
Авторы: Кривецков, Мерзляков, Столяров, Субботин
МПК: G11B 21/04
Метки: позиционирования, сигнала, системы, управляющего, формирования
...входному коду. Кроме того,блок 2 ограничения кодового сигнала способствует уменьшению разрядности цифроаналогового преобразователя 3. В частном случае блок 4 анализа ускорения может быть выполнен в виде акселерометра. Назначение функционального преобразователя 6 состоит в обеспечении равнозамедленного движения позиционера при торможении. Преобразователь 6 представляет собою вычислитель функции извлечения квадратного корня из входного сигнала, отображающего пройденный позиционером путь. Устройство работает следующим образом.Двоичный код заданного адреса перемещения позиционера поступает на входы занесения счетчика 1 разности и проходит последовательные преобразования в блоке 2 ограничения кодового сигнала, цифроаналоговом...
Формирователь управляющего сигнала для восстановления несущей

Номер патента: 1807580
Опубликовано: 07.04.1993
Авторы: Борминский, Каплунов
МПК: H04L 27/22
Метки: восстановления, несущей, сигнала, управляющего, формирователь
...Формирователь при этом работает как фазовый детектор,Таким образом, в предлагаемом устройстве решение о величине и знаке частотнойрасстройки производится на основе анали 30 2 п, Е 2 п - отсчеты сигнала на выходах01 и 02 на и-ом тактовом интервале, представленные в пятиразрядном двоичном па раллельном коде;здпЬп, з 9 п 72 п - значения знаковыхразрядов 01 и 02 на и-ом тактовом интервале,Информационные выходы ПЗУ фазово го детектора сигнал Ефдп присоединены ксигнальным входам параллельного регистра сдвига 04 (К 555 ИР 27) и к адресным входам второго ПЗУ (06 К 573 РФ 5). К следующим адресным входам 06 присоединены 45 выходы 04(сигнал Ефдп - 1), На Об выполненблок управления, алгоритм работы которого выглядит следующим образом: О, если Ефдп -...
Способ автоматического направления движения тракторных агрегатов по заданной траектории
Номер патента: 342567
Опубликовано: 01.01.1972
Авторы: Макеев, Шипилевский
МПК: A01B 69/04
Метки: агрегатов, движения, заданной, направления, траектории, тракторных
...на поворот в случае,превышения рассогласования над величиной зоны 10 нечувствительности.С целью обеспечения высокого качества копирования заданной траектории и уменьшения перерегулирования по предлагаемому способу дополнительно определяют знак первой про изводной рассогласования по времени, производят сравнение знаков рассогласования и его производной и в случае несовпадения этих знаков, т, е. в случае окончания роста рассогласования, прекращают выдачу команды на 20 поворот.По данному способу в автоматическую систему направления движения агрегата вводится логическое звено, при помощи которого оканчивается подача управляющего сигнала 25 в момент прекращения роста сигнала рассогласования. Команда на поворот выдается только при условии,...
Предыдущий патент: Резервированное устройство
Следующий патент: Устройство для автоматического управленияштабелером
Случайный патент: Подставка для наложения гипсовых повязок