182423
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 182423


Текст
ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Ссюз Ссветских Социалистических РеспубликЗависимое от авт. свидетельстваЗаявлено 03.Х .1958 ( 700048/40-23) Кл. 42 о, 17 присоединением заяв МПК б 01 р Комитет пс деламизсбретеиий и сткрытипри Сввете МииистровСССР иорите ДК 531.76/.77(088.8) юллетень11 Дата опубликования описания 1.ЧП 1.1966 Авторизобретения М. И, Захарин ител ПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ оро- центьные етставиинат вид оро,- - Л(о, с - 2(2 о оз ср + о т в 1 п Р) -о,- сру о; - 2(о"р,о- 2(2 о, о о=а, +Л о;созср -о;=а.,+), о;з 1 п, -,(з 1 п о, в 1 па,(з 1 п ф, соз т+ з 1 п ") с= а,.с созе, з з ,созо-,-аи о,сов ")+,. (со осозз 1 и;,) Н) сокОпубликовано 25.7,1966 Настоящее изобретение относится к инерциальной навигации, Известны способы инерциальной навигации, в которых текущие координаты объекта определяют с помощьюплатформ с акселерометрами либо неподвижных в инерциальном пространстве, либокорректируемых в плоскости горизонта и азимуте. Показания акселерометров этих системинтегрируются в вычислительных устройствах,Однако при применении таких способов используется система сравнительно большихгабаритов и значительного веса, велико время запуска, ограничены перспективы повышения надежности этих систем ввиду невозможности резервирования гироплатформ.Предлагаемый способ позволяет повыситьточность работы системы и унифицировать ееузлы.Сущность способа заключается в следующем,Текущие координаты объекта относительнопервоначального положения, соответствующего исходной точке его траектории движения,определяют решением кинематических уравнений с помощью бортовой вычислительноймашины. Данные получают либо от шестиакселерометров, попарно разнесенных относительно связанных осей объекта и жесткосвязанных с его корпусом, либо от трех акселерометров и трех датчиков угловых ск стей движения объекта, помещенных в ре масс последнего так, что их измерител оси ортогональны и направлены по соотв вующим связанным осям объекта.Так, например, для решения задачи н гации в ортодромической системе коорд кинематические уравнения будут иметь (для варианта с датчиками угловых ск стей):О=Р 81 П рвЯ, = - 2 СО 8 Р,81 пфв,где Составитель Н. МалышеваРедактор Р. Киселева Текред Г, Е. Петровская Корректор Ю. Я. федулова Заказ 328219 Тираж 1000 Формат бум. 60)(9018 Объем 0,16 изд. л. ПодписноеЦНИИПИ Комитета по делам изобретений и открытий при Совете Министров СССРМосква, Центр, пр. Серова, д, 4 Типография, пр. Сапунова, 2+:, СО 881 П о - шСОЗ оа - оз ", 81 П81 П) оа - юа 81 П 1 а + шах Со 8 1 а - В81 П а -- озсСО 8, Та ах (озау СО 8 Та озаг 81 П Та) М оа СОСОВ а 8 ЕС Оа + 01 С 81 П а 8 ЕС Оа 0 = (2,81 п Л + Я,соз Л ) со 8 в - 0;,81 п срй у -- (2 ц, 81 п А + О,соз Л ) 81 п уу + 2 с, соз рЕ - О СО 8 9 в СО 8 % о п, о, и -составляющие векторов скорости и ускорения движения центра масс объекта в земной ортодромической системе координат;а, а,1, а - составляющие вектора абсолютного ускорения движения центра масс объекта;Ф Лв, Н, Л,з, Н - соответственно ортодромические (условные) координаты местоположения объекта на земной поверхности, отсчитываемые от точки старта, и высота его движения над уровнем моря, а также скорости изменения этих координат во времени;Ц , У 0;, УЮ, 2;, - проекции вектора угловой скорости суточного вращения Земли на оси ортодромической системы координат в точке местоположения объекта, а также начальные их значения, соответствующие точке старта;д - ускорение силы тяжести;аа, а. - показания акселерометров;, о, Т, ь оа, Т - Углы хаРактсРизУющиеугловое положение измерительных осей акселерометров относительно плоскости горизонта и в азимуте в ортодромической системе координат, а также скорости их изменения во времени;р Т, географическая широта и путевой угол координатной ортодромии в точке старта объекта;озах оау, й аг - показания соответствующих датчиков угловых скоростей системы;а , оза, - проекции вектора угловой скорости вращения координатного трехгранника ортодромической системы координат с началом в центре масс объекта в процессе движения последнего;Р, - радиус земной сферы.Этот способ позволяет использовать прецизионные акселерометры и гироскопы, имеющие сравнительно большие габариты и вес, которые не вписываются в габариты существующих гироплатформ.30 Предмет изобретенияСпособ инерциальной навигации, отличаюиийся тем, что текущие координаты объекта, например в ортодромической системе координат, относительно первоначального положеЗ 5 ния, соответствующего исходной точке траектории объекта, определяют решением, например при помощи вычислительной машины, уравнений движения объекта по данным линейных абсолютных ускорений центра масс 40 объекта и угловых ускорений или скоростейотносительно его центра масс от жестко закрепленных на объекте акселерометров линейных ускорений или акселерометров линейных ускорений и датчиков угловых скоро стей.
СмотретьЗаявка
700048
МПК / Метки
МПК: G01C 21/16, G01C 21/24
Метки: 182423
Опубликовано: 01.01.1966
Код ссылки
<a href="https://patents.su/2-182423-182423.html" target="_blank" rel="follow" title="База патентов СССР">182423</a>
Устройство для измерения скорости движения

Номер патента: 31687
Опубликовано: 31.08.1933
Автор: Львович
МПК: G01P 7/00
...3, увеличится вследствие увеличения давления на капсюль,а ток через капсюль 4 уменьшится, вследствие уменьшения давления.Если капсюли включить посхеме мостика Витстона (фиг, 2), то при равновесии, когда давления на капсюли 3 и 4 одинаковы, т,.е когда ускорение отсутствует при покое плоскости А или при равномерном движении, ток черезсчетчик С, включенный в диагональ мостика, не проходит, если мостикуравновешен сопротивлениями г, и га, При ускорении массы Я возникает увеличение давления на один из капсюлей и уменьшение на другой. Через счетчик проходит ток в ту или другую сторону, в зависимости от направления ускорения, Если ток, проходящий через счетчик С, пропорционален разности давлений на капсюли 3 и 4 и, следовательно,...
Система измерения параметров вращательного движения
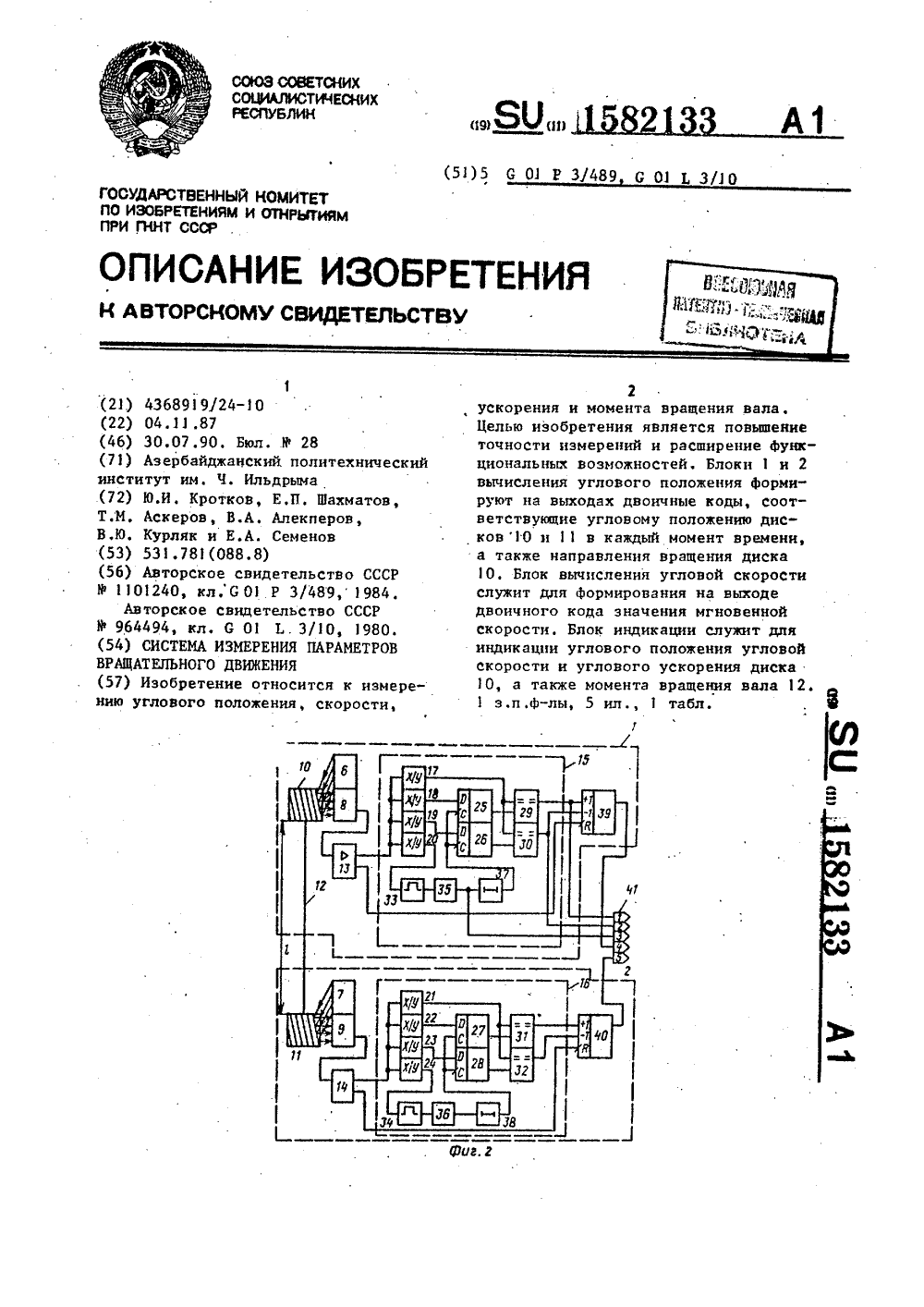
Номер патента: 1582133
Опубликовано: 30.07.1990
Авторы: Алекперов, Аскеров, Кротков, Курляк, Семенов, Шахматов
МПК: G01L 3/10, G01P 3/489
Метки: вращательного, движения, параметров
...на единицу, и на выход 1 колодки 41, Одновременно на выходах преобразователей 18 и 22 устанавливаются коды, на единицу большие текущие значения, а на выходах преобразователей 19,и 23 - на единицу меньшие текущего значения, которые через время 1 выдержки заносятся в регистры 25-28, изменяя их содержимое соответственно на единицу большее и меньшее, от- носительно текущего значения и подготавливая регистры к следующей операции сравнения.При повороте вала 12 на следующие шаги точного отсчета в том же направлении работа элементов схемы происходит в аналогичном порядке, и счетчики 39 и 40 каждый раз увеличивают содержимое на,единицу, фиксируя таким образом коды текущего значения углового положения вала 12.При повороте вала 12 на один...
Устройство для регулирования скорости движения объекта

Номер патента: 726504
Опубликовано: 05.04.1980
МПК: G05D 13/00
Метки: движения, объекта, скорости
...к выходу усилителя, а к выводу источника питания подПоставленная цель дсстиг 0 ко входу усилителя подключе торная обмотка электродвига На чертеже представлен схема устройства для регулир ти движения объекта.:ПодписноССР Тира ударствизобре Ж - 3 енто, г ПИ Роделам Москва П Па 113035,лиал ПП д. 4/5 ктнаи, 4 Ф М3Устройствоработает следующим образом.При усилителе инвергирующего типа,Ъ - котором"-возрастайие сигнала на"-входе усилителя влечет за собой уменьшение тока"в нагрузке на еговыходе, при вращенииэлектоодвигателя против часовой стрелки(со стороны вала) и показанной на схеме полярности подключения обмоток 5 и 6 к выходу усилителя 4 и обмотки 7 к его входу=появлечйе положительногО ускорения движения объектаи -электродвигателя...
Способ измерения параметров движения протяженного объекта со случайным распределением яркости

Номер патента: 753244
Опубликовано: 20.09.2006
Авторы: Абакумов, Бережной, Денкевиц, Кузнецов, Ляпидов, Мишин, Семавин
МПК: G01C 23/00
Метки: движения, объекта, параметров, протяженного, распределением, случайным, яркости
Способ измерения параметров движения протяженного объекта со случайным распределением яркостей, основанный на проецировании его изображения на экран приемника излучения, выделении в изображении прямоугольной области и преобразовании элементов изображения в электрические сигналы, пропорциональные яркости изображений в выделенной области, отличающийся тем, что, с целью повышения точности и ускорения измерения, дополнительно выделяют вторую прямоугольную область, границы которой ориентируют параллельно границам первой области, и одновременно в каждой из выделенных областей получают сигналы, пропорциональные средним значениям яркости на противоположных границах областей и среднему значению...
Устройство для определения скорости движения объекта со случайным распределением яркости

Номер патента: 856286
Опубликовано: 20.09.2006
Авторы: Абакумов, Антипин, Кузнецов, Мишин, Семавин
МПК: G01C 21/00, G01P 3/36
Метки: движения, объекта, распределением, скорости, случайным, яркости
Устройство для определения скорости движения объекта со случайным распределением яркости, содержащее приемную оптическую систему, приемник излучения прямоугольной формы, блок сравнения сигналов, соединенный с блоком деления, отличающееся тем, что, с целью упрощения устройства и повышения его быстродействия, в него введены два линейных приемника излучения и блок дифференцирования, причем линейные приемники излучения расположены на противолежащих сторонах приемника излучения прямоугольной формы, при этом выходы линейных приемников излучения соединены с входами блока сравнения сигналов, а выход приемника излучения прямоугольной формы соединен с входом блока дифференцирования, выход которого...
Предыдущий патент: Датчик порывов скорости ветра для летатетишхаппаратов
Следующий патент: Установка для поверки и градуировки датчиков ускорения
Случайный патент: Портативный сосуд для питья